1.本发明涉及一种用于运行马达的方法。此外本发明涉及计算机程序,该计算机程序设置用于执行所述方法的每个步骤,以及涉及机器可读取的存储介质,在该存储介质中存储所述计算机程序;最后,本发明涉及电子控制装置,该电子控制装置设置用于执行所述方法。
背景技术:
2.为了协调不同的扭矩要求,在带有常规驱动的机动车中通常使用最大选择。在带有回收的电动车辆中,通过对内燃机拖拽扭矩的模拟,在通常扭矩的最大选择的情况下可能发生在车辆层面的合成扭矩的跳跃。为了阻止该非期望的跳跃,能够以斜坡的形式实现在不同的扭矩之间的过渡。
3.de102006008642a1说明,在混合动力车辆的运行中,在(由最大值选择产生的)第一期望扭矩和(在当前转速下与所述内燃机的拖拽扭矩相符合的)第二期望扭矩之间的过渡是通过斜坡形式的过渡实现的。
技术实现要素:
4.在用于运行马达的方法中由多个扭矩要求求取目标扭矩。所述马达可能是内燃机或者电动机。所述多个扭矩要求包括特别是油门踏板的扭矩要求、速度控制器的扭矩要求以及爬行调节器的扭矩要求。在此,特别是从该扭矩要求中进行最大选择。特别地,也能够设置在求取所述目标扭矩时考虑其他信息,例如速度控制器的状态(接通或断开)或者油门踏板的位置。
5.借助于斜坡函数通过求取第一合成扭矩的方法使马达的当前扭矩适应于所述目标扭矩。在此,合成扭矩能够理解为通过该斜坡函数由所述目标扭矩和当前扭矩所求取的,并且作为控制命令传送给所述马达的扭矩。所述斜坡函数阻止所述马达扭矩的突然变化。
6.本发明提出,在计算装置或者控制装置中执行所述方法,该计算装置或者控制装置具有多层安全概念,特别是根据iso26262标准的三层安全概念。在该三层安全概念中,所述第一层面充当功能层面;所述第二层面充当监控该第一层面的安全层面;所述第三层面确保该第二层面的完整性。在所述多层安全概念的第一层面中求取所述第一合成扭矩。在所述第二层面中以通过扭矩走廊限定所述第一合成扭矩的方法求取第二合成扭矩。在此,所述方法使所述第一层面中的斜坡功能得到保护,并且以此进一步实现了该斜坡功能的可靠性和设计自由度的最大化。在此,所述方法基于如下思想,在所述第一合成扭矩超出或者低于所述扭矩走廊的范围时,在所述第二层面中将该第一合成扭矩限定在所述扭矩走廊的安全范围内。一旦从所述第一层面接收的第一合成扭矩达到了目前与该第一合成扭矩不同的第二合成扭矩,则能够将在所述第二层面求取的目标扭矩用作第二合成扭矩。
7.在本方法的优选实施方式中,将所述扭矩走廊的最小值限制为较早时刻求取的第二合成扭矩。通过此方式阻止所述第二合成扭矩发生非期望的降低,该非期望的降低使其
远离目标扭矩。
8.在本方法的其他优选实施方式中,不使用较早时刻求取的第二合成扭矩自身作为最小值,以限制所述扭矩走廊。而是事先设置第一偏移量。使用这种可校准的偏移量能够使所述最小值逐步地接近所述目标扭矩。
9.在本方法的优选实施方式中,使用在所述第二层面求取的目标扭矩作为用于限制所述扭矩走廊的最大值。用于求取第二层面中的目标扭矩能够使用与在所述第一层面中进入目标扭矩的计算相同的输入量。然而在此,优选地使用被保护值。使用所述目标扭矩作为该扭矩走廊的最大值阻止所述第二合成扭矩超出目标扭矩,因为根据所述斜坡功能所述第二合成扭矩应该仅上升至达到所述目标扭矩为止。
10.在本方法的其他优选实施方式中,将所述扭矩走廊的最大值附加地限制为设有第二偏移量的、在较早时刻求取的第二合成扭矩。与最小值一起(该最小值是在使用所述第一偏移量的情况下由同样的在较早时刻求取的第二合成扭矩计算出的)通过此种方式能够产生可校准的扭矩走廊。在所述第二层面中求取的目标扭矩进一步起到附加最大值的作用,通过此方法确保,即使在过高地选择第二偏移量的情况下也能够使所述第二合成扭矩不升高至该目标扭矩之上的值。
11.所述计算机程序设置用于执行所述方法的每个步骤,特别是当该计算机程序在计算装置中或者在电子控制装置中执行时。该计算机程序实现在电子控制装置中执行本方法的不同的实施方式,不需要对此进行构造上的更改。为此,所述计算机程序保存在所述机器可读取的存储介质中。
12.通过在常规的电子控制装置中执行所述计算机程序,获得设置用于借助所述方法运行的马达的电子控制装置。在此,所述电子控制装置具有多层安全概念,在该多层安全概念中特别地涉及根据iso26262标准的三层安全概念。
附图说明
13.本发明的实施例在附图中示出,并且在下述说明中详细阐述。
14.附图1示意性地示出根据本发明的方法的实施例的步骤如何在电子控制装置中运行。
15.附图2示意性地示出根据本发明的方法的另一实施例的步骤如何在控制装置中运行。
具体实施方式
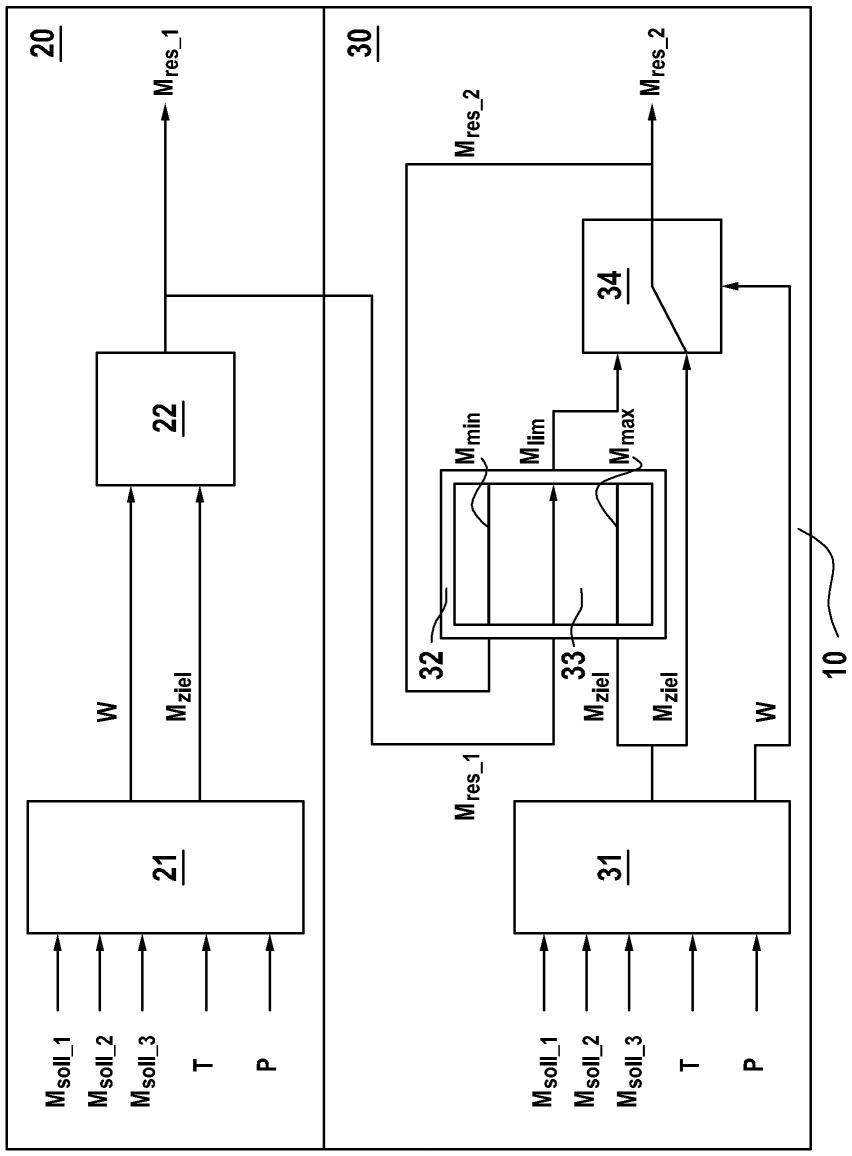
16.在附图1中示出车辆的电子控制装置10,在本实施例中该电子控制装置控制电动机。所述电子控制装置10具有根据iso26262标准的三层安全概念。对于所述方法基本的步骤在所述第一层面20中和在所述第二层面30中进行,因此在附图1中仅示出第一层面和第二层面。在所述第一层面20中由多个输入量进行所述马达的目标扭矩的求取21。该输入量包括所述机动车的油门踏板的扭矩要求、所述机动车的速度控制器的扭矩要求以及所述车辆的爬行调节器的扭矩要求。此外,在求取过程21中考虑速度控制器状态t,该速度控制器状态t表明该速度控制器是否接通或者断开,以及考虑所述油门踏
板位置p,该油门踏板位置p表明驾驶员使其偏移的程度。在此,所述三个扭矩要求、和经受最大选择。除了以该方式求取的目标扭矩之外还提供变化信息w,该变化信息w表明相对于之前最近求取的目标扭矩是否确定出在目标扭矩中的变化。将所述两个信息和w传递至斜坡函数22,该斜坡函数22提供第一合成扭矩。此外,将该第一合成扭矩传递至所述第二层面30。在所述第二层面30中,由输入量、、、t和p的被保护的值进行目标扭矩和变化信息w的进一步的求取。将在该第二层面30求取的所述目标扭矩传递至所述斜坡函数22的监控32中,并且在该监控32中将该目标扭矩作为扭矩走廊33的最大值使用。将在所述第二层面30中在之前最近的方法流程中求取的第二合成扭矩作为所述扭矩走廊33的最小值使用。若由所述第一层面20传递出的第一合成扭矩处在所述扭矩走廊33内,则在不改变该第一合成扭矩的情况下由监控32将其输出。然而,若该第一合成扭矩处在所述扭矩走廊33之外,则该第一合成扭矩被限制到最小值或者最大值。通过此方式产生由所述监控32限定的扭矩。经限定扭矩和在所述第二层面30求取的目标扭矩将与变化信息w一起提供给扭矩选择34。若根据所述变化信息w在目标扭矩中未发生变化,则该目标扭矩由所述扭矩选择34作为第二合成扭矩输出。否则,该扭矩选择34将所述经限定的扭矩作为第二合成扭矩输出。所述第二合成扭矩作为新的所述扭矩走廊33的最小值供所述监控32的下个方法流程使用。此外,所述第二层面30作为安全层供所述第二合成扭矩使用,以监控由第一层面20输出的所述第一合成扭矩,并且以此种方式确保所述斜坡函数22不向马达发送位于安全的扭矩走廊33之外的扭矩要求。
17.在附图2中示出的根据本发明的方法的第二实施例中,在所述监控32中使用与所述第一实施例不同的扭矩走廊33。所述最小值与上一个第二合成扭矩不一致,而是向其添加第一偏移量。所述最大值将通过以下方法计算,即在上一个第二合成扭矩的基础上添加第二偏移量,该第二偏移量大于所述第一偏移量。然而,将在第二层面30中求取的目标扭矩进一步传递至所述监控32,并且无关于该第二偏移量的大小,所述最大值不能够采用大于所述目标扭矩的值。所述第一偏移量与所述第二偏移量是可校准的,由此能够实现使经限定的扭矩逐步地接近所述目标扭矩。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。