1.本公开总体上涉及用于控制内燃机的涡轮增压器、并且更具体地用于控制由涡轮增压器提供给内燃机的增压压力的方法、装置和/或系统。
背景技术:
2.涡轮增压器通常用于增加到内燃机进气歧管的增压进气压力(例如,定义为每单位面积的力或每单位体积的能量)。涡轮增压器通常包括附接到轴的压缩机和涡轮。涡轮被设计为利用来自内燃机的废气的膨胀/流动来驱动轴,并且从而驱动压缩机。然后压缩机将空气从环境入口空气压力压缩到压缩的增压压力,该压缩的增压压力然后常常通过中间冷却器馈送到内燃机的进气歧管。增加的燃料量与增加的增压压力混合以实现适合内燃机中最优燃烧的空气/燃料比。这导致可以由内燃机传递的更多功率。
3.在一些情况下,诸如在内燃机的低rpm下,废气的膨胀/流动相对较低。当随后需要来自内燃机的快速增加的功率时,废气可能需要一些时间来加速涡轮增压器以传递所需的增压压力。涡轮增压器响应的这种延迟常常被称为涡轮迟滞。在一些情况下,电动马达辅助装置可联接到涡轮增压器的轴以在某些操作条件下辅助涡轮增压器轴的加速和/或减速。
4.在动态操作条件下控制此类涡轮增压器可能是一个挑战。控制算法常常是非线性的并且是资源密集型的。期望的是用于控制内燃机的涡轮增压器的改进方法、装置和/或系统。
技术实现要素:
5.本公开总体上涉及用于控制内燃机的涡轮增压器、并且更具体地用于控制由涡轮增压器提供给内燃机的增压压力的方法、装置和/或系统。一种用于控制由涡轮增压器提供的增压压力的示例方法,其中涡轮增压器包括包含涡轮增压器轴的涡轮增压器旋转组件、用于提供增压压力的压缩机,以及用于通过涡轮增压器轴驱动压缩机的涡轮,该涡轮增压器进一步包括用于通过涡轮增压器轴辅助驱动压缩机的电动马达辅助装置,以及用于控制由涡轮增压器提供的增压压力的一个或多个致动器,其中在操作期间,涡轮和电动马达辅助装置各自能够向涡轮增压器轴提供功率,并且压缩机吸收功率以提供增压压力,该方法可以包括接收增压压力需求和识别压缩机速度需求以实现接收的增压压力需求。该方法还可包括将压缩机速度需求转换为涡轮增压器旋转组件的动能需求,并通过控制由涡轮和电动马达辅助装置提供的功率来控制涡轮增压器旋转组件的动能以满足动能需求。
6.另外或可替代地,其中控制由涡轮和电动马达辅助装置提供的功率包括使用具有功率约束的多变量控制。
7.另外或可替代地,其中控制由涡轮和电动马达辅助装置提供的功率包括控制由涡轮提供的功率和由电动马达辅助装置提供的功率以共同满足动能需求。
8.另外或可替代地,其中控制由涡轮和电动马达辅助装置提供的功率包括基于一个或多个条件在由涡轮提供的功率和由电动马达辅助装置提供的功率之间最优地分配功率
需求。
9.另外或可替代地,其中一个或多个条件可包括以下中的一个或多个:对当前可由涡轮和/或电动马达辅助装置提供的功率的一个或多个定义的限制、一个或多个定义的超控(over-rides)以及一个或多个定义的功率偏好。
10.另外或可替代地,其中控制由涡轮和电动马达辅助装置提供的功率以满足动能需求包括控制涡轮增压器的一个或多个致动器。
11.另外或可替代地,其中控制由涡轮和电动马达辅助装置提供的功率以满足动能需求包括控制传递到电动马达辅助装置的电力。
12.另外或可替代地,其中控制由涡轮和电动马达辅助装置提供的功率以满足动能需求包括控制涡轮的废气门致动器。
13.另外或可替代地,其中由涡轮和电动马达辅助装置提供的总功率遵循动能需求。
14.另外或可替代地,其中控制由涡轮和电动马达辅助装置提供的功率以满足动能需求可包括跟踪涡轮增压器动能需求与涡轮增压器旋转组件的实际动能之间的误差,基于跟踪误差提供一个或多个反馈信号,提供表示用于压缩空气的预期功率的一个或多个前馈信号,将它们添加到反馈信号,并在涡轮功率和电力辅助装置的功率之间分配它们的总和,基于一个或多个反馈信号和一个或多个前馈信号生成控制信号,并施加控制信号来控制由涡轮提供的功率和由电动马达辅助装置提供的功率以满足动能需求。
15.另外或可替代地,其中涡轮包括控制绕过涡轮的流动路径的废气门,并且其中控制信号可以包括控制废气门打开程度的废气门信号和控制由电动马达辅助装置传递的扭矩的电力信号。
16.另外或可替代地,其中涡轮是具有用于控制可变几何涡轮的一个或多个叶片的位置的叶片致动器的可变几何涡轮,并且其中控制信号可以包括用于控制叶片致动器的叶片控制信号和控制由电动马达辅助装置传递的扭矩的电力信号。
17.另外或可替代地,其中生成控制信号可以包括非线性变换,该非线性变换将由涡轮提供的优选功率变换为废气门信号并将由电动马达辅助装置提供的优选功率变换为电力信号。
18.一种存储程序指令的示例非暂态计算机可读介质,该程序指令当由处理器执行时使处理器控制由涡轮增压器提供的增压压力,其中涡轮增压器包括用于提供增压压力的压缩机、用于通过涡轮增压器轴驱动压缩机的涡轮,以及用于通过涡轮增压器轴辅助驱动压缩机的电动马达辅助装置,以及用于控制由涡轮增压器提供的增压压力的一个或多个致动器,其中在操作期间,涡轮和电动马达辅助装置各自能够向涡轮增压器轴提供功率,并且压缩机吸收功率以提供增压压力,程序指令可使处理器接收增压压力需求并识别压缩机速度需求以实现接收的增压压力需求。程序指令还可使处理器将压缩机速度需求转换为涡轮和电动马达辅助装置的动能需求。程序指令还可以使处理器控制由涡轮和电动马达辅助装置提供的动能以满足动能需求。
19.另外或可替代地,其中程序指令使处理器使用预定义的压缩机图识别压缩机速度需求以实现接收的增压压力需求。
20.另外或可替代地,其中程序指令使处理器接收代表由涡轮增压器提供的实际增压压力的信号,至少部分地基于代表由涡轮增压器提供的实际增压压力的信号确定功率校正
项,并且使用功率校正项控制由涡轮和电动马达辅助装置提供的动能以满足动能需求。
21.另外或可替代地,其中程序指令使处理器使用卡尔曼滤波器确定功率校正项。
22.另外或可替代地,其中程序指令使处理器使用具有约束的最优多变量控制来控制由涡轮提供的动能和由电动马达辅助装置提供的动能。
23.一种用于控制由涡轮增压器提供的增压压力的示例方法,其中涡轮增压器包括用于提供增压压力的压缩机、用于通过涡轮增压器轴驱动压缩机的涡轮,以及用于控制由涡轮增压器提供的增压压力的一个或多个致动器,其中在操作期间,涡轮向涡轮增压器轴提供功率,并且压缩机吸收功率以提供增压压力,该方法包括接收增压压力需求并识别压缩机速度需求以实现接收的增压压力需求。该方法还包括将压缩机速度需求转换为功率需求并控制由涡轮提供的功率以满足功率需求。
24.另外或可替代地,其中涡轮增压器进一步包括用于通过涡轮增压器轴辅助驱动压缩机的电动马达辅助装置,其中控制步骤包括控制由涡轮和电动马达辅助装置提供的功率以满足功率需求。
25.一些实施例的以上概述并非旨在描述本公开的每个公开的实施例或每个实现方式。下面的附图和详细说明更具体地举例说明了这些实施例。
附图说明
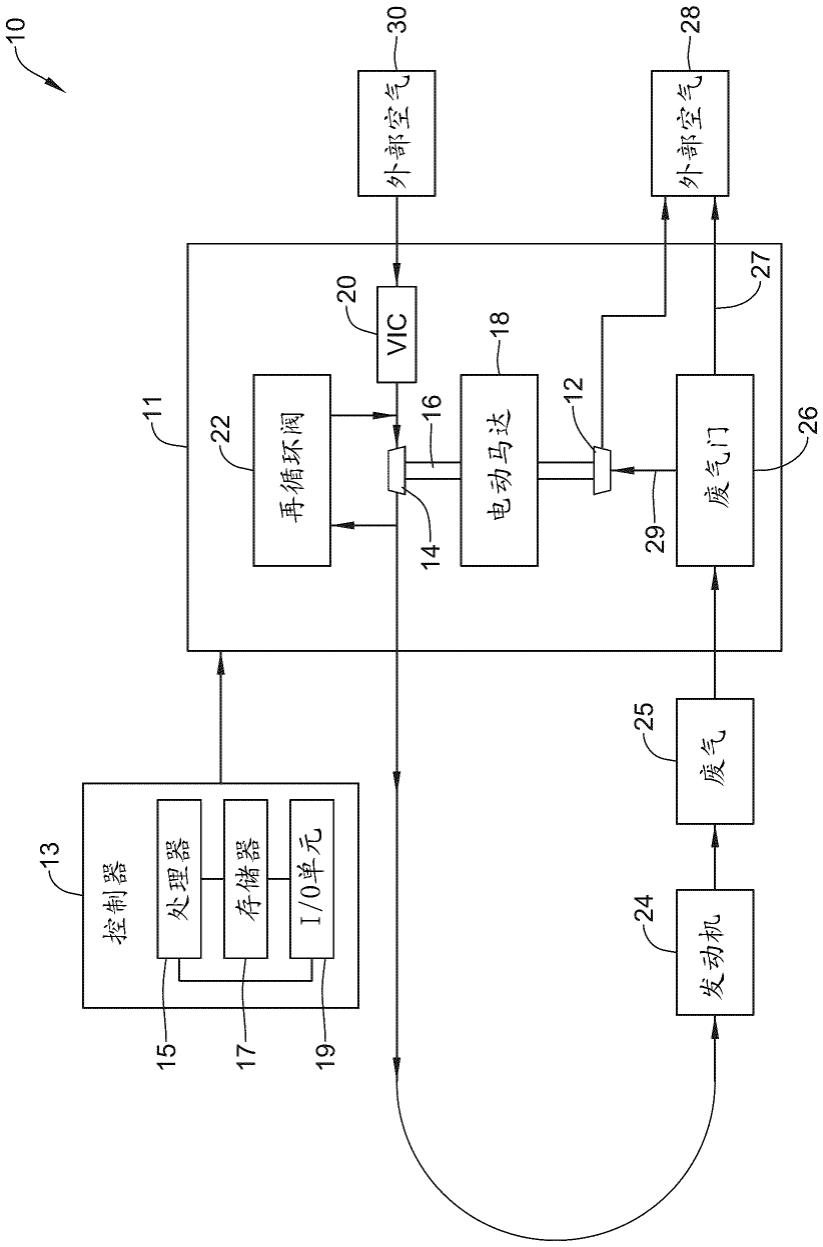
26.结合附图考虑以下详细描述可以更全面地理解本公开,在附图中:图1是为内燃机服务的说明性电动马达辅助的涡轮增压器的框图;图2a-2b是控制图1的电动马达辅助的涡轮增压器的说明性方法的流程图;图3是示出控制发动机系统组件的说明性方法的流程图;图4是示出控制发动机系统组件的说明性方法的流程图;图5是示出控制发动机系统组件的说明性方法的流程图;以及图6是示出控制发动机系统组件的说明性方法的流程图。
27.虽然本公开可以进行各种修改和替代形式,但其细节已经通过示例的方式在附图中示出并且将被详细描述。然而,应当理解,意图不是将公开内容限制于所描述的特定实施例。相反,其意图是涵盖落入本公开的精神和范围内的所有修改、等同物和替代物。
具体实施方式
28.对于以下定义的术语,将应用这些定义,除非在权利要求中或本说明书的其它地方给出了不同的定义。
29.无论是否明确指出,本文假定所有数值都由术语“约”修饰。术语“约”通常是指本领域技术人员会认为等同于所述值的数字范围(例如,具有相同的功能或结果)。在许多情况下,术语“约”可包括四舍五入到最接近的有效数字的数字。
30.端点对数字范围的叙述包括该范围内的所有数字(例如,1到5包括1、1.5、2、2.75、3、3.80、4和5)。
31.在本说明书和所附权利要求书中使用的单数形式“一”、“一个”和“该”包括复数形式,除非内容另有明确规定。在本说明书和所附权利要求书中使用的术语“或”通常以其包括“和/或”的含义使用,除非内容另有明确规定。
32.需要注意,说明书中对“实施例”、“一些实施例”、“其它实施例”等的提及指示所描述的实施例可以包括一个或多个特定特征、结构和/或特性。然而,此类叙述并不一定意味着所有实施例都包括特定的特征、结构和/或特性。此外,当结合一个实施例描述特定特征、结构和/或特性时,应当理解,这些特征、结构和/或特性也可以与其它实施例结合使用,无论是否明确描述,除非明确相反地说明。
33.下面的详细描述应参考附图阅读,其中不同附图中的相似元件采用相同的编号。不一定按比例绘制的附图描绘了说明性实施例并且不旨在限制本公开的范围。
34.图1是说明性发动机系统10的框图,该发动机系统10包括为内燃机24服务的说明性电动马达辅助的涡轮增压器11。说明性电动马达辅助的涡轮增压器11包括经由轴16连接到压缩机14的涡轮12。电动辅助马达18可以联接到轴16以在某些操作条件下辅助涡轮增压器轴的加速和/或减速。说明性发动机系统10可进一步包括废气门(wg)致动阀单元26、可变入口压缩机(vic)叶片20和再循环阀(rcv)22。在一些情况下,可以不提供废气门(wg)致动阀单元26、可变入口压缩机(vic)叶片20和/或再循环阀(rcv)22中的一个或多个。
35.此外,发动机系统可以包括控制器13。控制器13可以是发动机控制模块(ecm)或发动机控制单元(ecu),其一部分,或包括发动机控制模块(ecm)或发动机控制单元(ecu),其中具有控制系统算法。控制器13可以包括具有一个或多个处理器15、存储器17、一个或多个输入/输出端口19和/或一个或多个其它合适的组件的一个或多个组件。存储器17可以包括一个或多个控制系统算法和/或其它算法,并且处理器15可以执行与存储器17中的算法相关的指令(例如,软件代码或其它指令)。存储器17可以包括由处理器执行的指令。存储器17可以是任何合适的存储器类型并且可以被认为是被配置为以非暂时状态在其上存储指令的计算机可读介质。i/o端口19可以向发动机控制系统(包括发动机24和涡轮增压器11)发送信息和/或控制信号,和/或从发动机控制系统接收信息和/或控制信号。
36.通常,汽车发动机系统10可通过利用从发动机24排出的废气25来使说明性电动马达辅助的涡轮增压器11的涡轮12旋转来操作。附图标记29表示尚未被废气门26转向通过涡轮12的废气。废气流25可以使涡轮12旋转,该涡轮12进而旋转轴16和压缩机14二者。压缩机14可以压缩外部空气30,该外部空气30经由旋转压缩机14被吸入系统10。在到达压缩机14之前,外部空气30可以经过可变入口压缩机叶片20,但这不是必需的。压缩机14将空气30从外部环境压力压缩到所需的增压压力,该增压压力有时通过中间冷却器(未示出)提供给发动机24的进气歧管。
37.在一些情况下,废气25的气流不足以满足发动机24的即时增压压力需求,诸如在发动机负荷快速增加期间。增压压力(和延迟加速)的该建立通常被称为“涡轮迟滞”。为了补偿涡轮迟滞,电动马达18(当被提供时)可以辅助轴16加速以更快地增加由说明性电动马达辅助的涡轮增压器11提供的增压压力。在一些情况下,没有提供电动马达18。
38.控制涡轮增压器(诸如说明性电动马达辅助的涡轮增压器11)的增压压力的挑战之一是通过常常以多变量和非线性方式致动多个致动器(例如wg、rcv、vic)来控制增压压力,并且因此控制算法常常是非线性和资源密集型的。为了帮助降低此类控制的复杂性,可能期望经由与增压压力线性相关的输入变量来控制增压压力。例如,可能期望经由涡轮增压器的压缩机图的反演将增压压力需求转换为涡轮增压器速度(例如轴16的角旋转),并且然后转换为涡轮增压器动能,并且然后控制动能以实现增压压力需求。控制动能是线性控
制问题。也就是说,控制涡轮增压器12的动能具有部署线性反馈和/或线性前馈控制算法以实现多变量约束的控制方法的优点,其中基础方程是线性的并且更容易考虑可能的不确定性。
39.图2a-2b是控制图1的电动马达辅助的涡轮增压器的说明性方法的流程图。在31处接收增压压力设定点,如上所述,其可以被设定以实现所需的发动机响应(例如,所需的加速度)。在接收到增压压力设定点31之后,可以应用一个或多个保护装置32以帮助防止损坏电动马达辅助的涡轮增压器11。例如,保护装置32可以调节接收的增压压力设定点31以防止涡轮增压器超速、压缩机出口空气过热、涡轮增压器过热和/或过度增压、浪涌保护等。在一些示例中,保护装置32接收多个参数,包括增压压力设定点31和压缩机质量空气流量设定点,并在必要时修改增压压力设定点31和/或压缩机质量空气流量设定点,以帮助保护电动马达辅助的涡轮增压器11。在一些情况下,保护装置32还可以限制废气门位置,设定由电动马达输出的扭矩的最大值,并限制再循环阀的位置(如果这些存在)。
40.在所示的示例中,测量的(例如,实际的)增压压力51被转换为涡轮增压器的实际速度和实际动能37,而增压压力设定点31(有时由保护装置32修改)被转换为涡轮增压器11的实际速度设定点和动能设定点36。从测量的增压压力51到实际速度和实际动能37以及从增压压力设定点31到动能设定点36的正向变换由框35表示。在一些情况下,正向变换框35包括两个框,压缩机图反演框33和能量变换框34。压缩机图反演框33可以将测量的增压压力51变换成压缩机14的角速度ω,以及因此如上所述的轴16的角旋转速度。压缩机图反演框33还可以将增压压力设定点31变换成压缩机14的角速度ω设定点。这些变换可以基于来自涡轮增压器11的制造的压缩机图。一旦测量的增压压力51和增压压力设定点31(有时由保护装置32修改)被转换成压缩机14的角速度ω和角速度设定点,能量变换框34将该角速度ω转换成实际动能37,并且将角速度设定点转换成涡轮增压器11的动能设定点36。
41.对于图1的电动马达辅助的涡轮增压器11,轴16上的功率平衡可由下式表示:其中: = 涡轮增压器角速度随时间推移的变化j = 涡轮增压器的惯性 = 由涡轮产生的功率 = 由压缩机消耗的功率ω = 压缩机轴的角速度 = 涡轮增压器中的摩擦损失。
42.由电动马达辅助装置(当存在时)施加的功率向轴16添加附加功率项:其中: = 由电动辅助马达产生的功率ω = 压缩机轴的角速度
ꢀ
= 由电动辅助马达产生的扭矩因此,轴16上的功率平衡可以由下式表示: 。
43.涡轮增压器的角速度ω可以使用变换变换成动能“e”。动能“e”的变化率可以通过将变换关于时间微分来表达,得到:得到: 。
44.将上述变换应用于功率平衡方程(并为简单起见,假设 = 0)并代入,在上面的功率平衡方程中产生:在上面的功率平衡方程中产生: 。
45.此外,知道,并且代入上述方程得到:其中: = 动能随时间推移的变化 = 由涡轮产生的功率 = 由压缩机消耗的功率 = 由电动辅助马达产生的功率。
46.以上方程说明涡轮增压器轴上的动能(e)随电动辅助马达提供的功率()加上由涡轮产生的功率()和压缩空气所需的压缩机吸收的功率()动态变化。以功率域表达的该动能功率平衡方程关于电动马达辅助功率()、涡轮功率()和压缩机功率()是线性的。可以理解,在一些情况下,可能期望在线性功率(能量)域中经由涡轮功率()以及在一些情况下当存在电动马达辅助装置时的电功率()的操纵来控制涡轮增压器的增压压力。如上所述,由于电动马达功率()和涡轮功率()可以用线性动能功率平衡方程来表示,因此可以利用经典的线性控制理论,这可以很大地简化控制算法并显著降低计算功率要求。
47.此外,实际动能值37可以表示在电动辅助马达18和废气门26已经被调节(如上所述)之后涡轮增压器11的动能。在一些情况下,观测器56可用于去除噪声并以其它方式滤波实际动能值37。观测器56还可提供功率校正项以说明功率计算中的不确定性和/或不准确
度。
48.在一些情况下,观测器56可以包括卡尔曼滤波器。卡尔曼滤波器的内部模型引入功率校正项(v),该功率校正项(v)将摩擦损失和不准确度累积为一项。于是将功率平衡模型扩充为型扩充为其假设功率校正项(v)是稳态下的恒定扰动。卡尔曼滤波器可被配置为估计的动能值并基于所得增压压力确定功率校正项。可以确定估计动能值和功率校正项,使得它们满足扩充的功率平衡方程。相应地,卡尔曼滤波器的功率平衡方程可以如下给出:
ꢀꢀ
其中: = 动能随时间推移的变化 = 功率校正随时间推移的变化 = 电动辅助马达设定点功率 = 涡轮设定点的功率 = 压缩机的功率 = 功率校正项= 观测器增益e = 实际动能 = 估计能量。
49.来自实际增压压力51的反馈被包含在压缩机功率项()和实际动能(e)与估计能量()之间的误差中。观测器增益()是控制策略的积分部分,因为估计功率校正()对实际动能和估计动能之间的误差进行积分。
50.一旦将校正应用于实际动能值37,通过计算涡轮增压器的实际动能37(如由观测器56修改)与从有时由保护装置32修改的增压压力设定点31推导的动能设定点36之间的差,推导出能量跟踪误差“e”。在一些情况下,一些保护装置32可以扩展到观测器56并由观测器56强制执行。零能量跟踪误差“e”意味着实际增压压力51等于增压压力设定点31。能量跟踪误差可以被反馈到该方法中并用于计算电动辅助马达的功率44和涡轮的功率45的反馈部分40。
51.参考上面的动能功率平衡方程,可以理解,使用已知方法使用通过压缩机的空气质量流量、空气的热容量、入口压缩机压力(或温度)和出口压缩机压力(或温度),可以计算
压缩机功率()。此外,动能(e)可以根据压缩机轴的角速度ω和涡轮增压器的惯性j确定。电动马达辅助功率()和涡轮功率()可以使用反馈和/或前馈控制来控制以满足动能功率平衡方程。
52.动能功率平衡方程常常有多种解。例如,在一些条件下,涡轮功率()可以提供满足动能功率平衡方程所需的大部分或全部功率。在其它条件下,电动马达辅助功率()可以提供满足动能功率平衡方程所需的大部分或全部功率。在一些条件下,满足动能功率平衡方程的功率可以在由涡轮提供的功率和由电动马达辅助装置提供的功率之间分配。
53.由电动辅助马达提供的功率()44和由涡轮提供的功率()45可以被确定为反馈控制部分40和前馈控制部分42的总和,诸如由以下方程表示:诸如由以下方程表示:其中:= 电动辅助马达的功率设定点 = 电动辅助马达功率的反馈控制部分 = 电动辅助马达功率的前馈控制部分 = 涡轮的功率设定点 = 涡轮功率的反馈控制部分 = 涡轮功率的前馈控制部分。
54.在一个示例中,反馈部分包括比例(p)控制项,该控制项是反馈增益g和能量跟踪误差(e)的乘积,如以下方程所示:如以下方程所示:其中: = 电动辅助马达功率的反馈增益 = 涡轮功率的反馈增益e = 能量跟踪误差。
55.在所示示例中,能量跟踪误差“e”是涡轮增压器的当前动能与从有时由保护装置32修改的增压压力设定点31推导的动能设定点36之间的差。零能量跟踪误差“e”意味着实际增压压力51等于增压压力设定点31。
56.前馈部分42可以通过用公式表示和求解功率分配优化问题(psop)来确定。psop可以提供以下前馈部分:以提供以下前馈部分:其中:= 电动辅助马达的前馈控制部分= 涡轮的前馈控制部分。
57.psop被配置为在满足一组约束的同时生成这些前馈部分。psop可以为功率、限制、参考的实际值和过去值提供优化解,并在下一次采样中对于新输入的测量值重复优化。以该方式,psop可以被配置为根据发动机上的变化条件预测和调节和。psop可在解决以下优化问题时生成前馈部分:受限制于 设定点跟踪条件 电动马达功率限制 涡轮功率限制 电动马达功率变化率限制 涡轮功率变化率限制其中: = 电动辅助马达的优选功率的优化权重 = 涡轮优选功率的优化权重 = 电动马达功率变化率的优化权重 = 涡轮功率变化率的优化权重 = 电动辅助马达的优选功率 = 涡轮的优选功率 = 前一个样本中应用的电动辅助马达的功率 = 前一个样本中应用的涡轮的功率 = 电动辅助马达允许的最小功率 = 电动辅助马达允许的最大功率 = 涡轮允许的最小功率 = 涡轮允许的最大功率 = 电动辅助马达允许的最小功率变化率 = 电动辅助马达允许的最大功率变化率 = 涡轮允许的最小功率变化率 = 涡轮允许的最大功率变化率 = 压缩机的实际计算功率 = 由观测器的估计功率校正。
58.在所示的示例中,psop产生针对电动辅助马达的功率()的计算设定点和针对涡轮功率()的计算设定点,它们共同满足功率平衡方程,同时保持在适用的约束范围内。可以看出,在该示例中,驱动压缩机以实现增压压力设定点的功率在电动辅助马达和涡
轮之间分配。
59.一旦电动辅助马达的功率的设定点()44和涡轮的功率的设定点() 45已经确定,电动辅助马达的功率的设定点()44可以变换46成电动马达扭矩设定点48并且涡轮的功率的设定点() 45可以变换47成涡轮的废气门设定点49。
60.电动辅助马达的功率设定点44可以经由以下扭矩-功率关系变换46成电动马达扭矩设定点48:其中: = 电动马达扭矩设定点 = 电动马达设定点的功率ω = 涡轮的角速度。
61.涡轮功率的设定点() 45可以变换47成废气门设定点49。该逆变换依赖于将废气门和涡轮之间的废气流分配表征为废气门开度的函数的废气测量值。特别地,给定的总废气流量可以相对于从涡轮流量图中确定的涡轮流量进行映射。涡轮流量图属于涡轮增压器特性,并且其是涡轮转速(n)、涡轮入口处的废气温度,、以及测量的涡轮出口和涡轮入口的废气压力比的函数,一般表示为。废气质量流量与涡轮流量之比由下式给出其在这里缩写为废气门非线性,并且取决于废气门开度。典型的相关性可被直观化,如下图所示:
62.对于废气门的完全关闭位置,废气门非线性给出1的比率,因为涡轮流量等于废气流量。非线性单调增加,直到该比率在废气门完全打开位置的某个最大值处稳定。在该比率
保持单调并且在发动机操作中没有显著变化的情况的假设下,它可以被映射和求逆以获得。
63.涡轮功率设定点到废气门位置的逆变换依赖于上述废气门非线性图。考虑涡轮功率由下式给出:其中: = 涡轮质量流量 = 废气热容 = 涡轮入口处的废气温度 = 涡轮入口处的废气压力 = 涡轮出口处的废气压力 = 废气热容比 = 作为取决于涡轮转速(n)和涡轮压力比的图给出的涡轮效率。
64.用废气门非线性流量比代替涡轮流量得到
65.从上述方程中消除会产生函数,该函数将涡轮功率设定点映射到流量比设定点
66.可以使用废气门非线性逆映射将流量比设定点变换为废气门设定点(。
67.在使用上述计算确定电动辅助马达扭矩设定点48和废气门设定点49之后,电动马达扭矩设定点信号48和废气门设定点信号49可用于控制提供给电动辅助马达的电流和涡轮增压器11的废气门致动器的位置。
68.可以理解,在电动辅助马达18和废气门26被调节之后,涡轮增压器11可以生成反映电动辅助马达18的扭矩和废气门26的位置的确定设置的增压压力。该所得增压压力可以如框51处测量或以其它方式确定或估计。
69.图3描绘了控制发动机系统的操作的说明性方法100。在一些情况下,该方法可以被配置为控制由涡轮增压器提供的增压压力,其中涡轮增压器包括包含涡轮增压器轴的涡轮增压器旋转组件、用于提供增压压力的压缩机,以及用于通过涡轮增压器轴驱动压缩机的涡轮。涡轮增压器可进一步包括用于通过涡轮增压器轴辅助驱动压缩机的电动马达辅助装置,以及用于控制由涡轮增压器提供的增压压力的一个或多个致动器,其中在操作期间,涡轮和电动马达辅助装置各自能够向涡轮增压器轴提供功率,并且压缩机吸收功率以提供增压压力。方法100还可包括接收102增压压力需求。该方法可进一步包括识别104压缩机速度需求以实现接收的增压压力需求。此外,该方法可包括将压缩机速度需求转换106为涡轮
增压器旋转组件的动能需求。此外,该方法可包括通过控制由涡轮和电动马达辅助装置提供的功率来控制108涡轮增压器旋转组件的动能以满足动能需求。
70.图4描绘了控制发动机系统的操作的说明性方法200。在一些情况下,该方法可以被配置为控制由涡轮增压器提供的增压压力,其中涡轮增压器包括包含涡轮增压器轴的涡轮增压器旋转组件、用于提供增压压力的压缩机,以及用于通过涡轮增压器轴驱动压缩机的涡轮。涡轮增压器可进一步包括用于通过涡轮增压器轴辅助驱动压缩机的电动马达辅助装置,以及用于控制由涡轮增压器提供的增压压力的一个或多个致动器,其中在操作期间,涡轮和电动马达辅助装置各自能够向涡轮增压器轴提供功率,并且压缩机吸收功率以提供增压压力。方法200还可包括接收202增压压力需求。该方法可进一步包括识别204压缩机速度需求以实现接收的增压压力需求。此外,该方法可以包括将压缩机速度需求转换206为涡轮增压器旋转组件的动能需求。此外,该方法可以包括跟踪208涡轮增压器动能需求和涡轮增压器旋转组件的实际动能之间的误差。该方法可以进一步包括基于跟踪误差提供210一个或多个反馈信号。该方法还可以包括提供212一个或多个反馈信号,该反馈信号在由涡轮提供的优选功率和由电动马达辅助装置提供的优选功率之间分配动能需求。此外,该方法可以包括生成214控制信号和一个或多个前馈信号,并且施加216控制信号以控制由涡轮提供的功率和由电动马达辅助装置提供的功率以满足动能需求。
71.图5描绘了说明性方法300,该说明性方法300包括存储程序指令的非暂态计算机可读介质,该程序指令当由处理器执行时使处理器控制由涡轮增压器提供的增压压力。涡轮增压器可包括用于提供增压压力的压缩机、用于通过涡轮增压器轴驱动压缩机的涡轮,以及用于通过涡轮增压器轴辅助驱动压缩机的电动马达辅助装置。该方法还可包括用于控制由涡轮增压器提供的增压压力的一个或多个致动器,其中在操作期间,涡轮和电动马达辅助装置各自能够向涡轮增压器轴提供功率并且压缩机吸收功率以提供增压压力。在一些示例中,程序指令可以使处理器接收302增压压力需求。程序指令还可识别304压缩机速度需求以实现接收的增压压力需求。此外,程序指令可以将压缩机速度需求转换306为涡轮和电动马达辅助装置的动能需求。此外,程序指令可以通过控制由涡轮和电动马达辅助装置提供的功率来控制308涡轮增压器旋转组件的动能以满足动能需求。
72.图6描绘了控制由涡轮增压器提供的增压压力的说明性方法400,其中涡轮增压器包括用于提供增压压力的压缩机、用于通过涡轮增压器轴驱动压缩机的涡轮,以及用于控制由涡轮增压器提供的增压压力的一个或多个致动器,其中在操作期间,涡轮向涡轮增压器轴提供功率,并且压缩机吸收功率以提供增压压力。方法100还可包括接收102增压压力需求。该方法可进一步包括识别104压缩机速度需求以实现接收的增压压力需求。此外,该方法可包括将压缩机速度需求转换106为涡轮增压器旋转组件的动能需求。此外,该方法可包括通过控制由涡轮和电动马达辅助装置提供的功率来控制108涡轮增压器旋转组件的动能以满足动能需求。
73.应当理解,本公开在许多方面仅是说明性的。在不超出本发明的范围的情况下,可以在细节上,特别是形状、大小、步骤安排等方面进行改动。在适当的程度上,这可以包括一个示例实施例的任何特征被使用在其它实施例中。当然,本公开的范围是用所附权利要求所表达的语言来定义的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
