1.本实用新型涉及钢筋混凝土排水管生产线的辅助工具,尤其涉及运送钢筋骨架的运送车。
背景技术:
2.现有中小规格排水管多采用径向挤压工艺制管机,在模具内设置钢筋骨架,然后向模具内挤压混凝土,待成型后脱模,一个完整的钢筋骨架有利于约束混凝土,提高混凝土构件的整体性。但随着社会发展,人工成本越来越高,以及节能环保等实际需要,迫切需要随径向挤压主机配套相关周边设备,形成自动化生产线,符合国家相关产业政策要求。现有工艺没有钢筋骨架运送装置,排水管用钢筋骨架安装时都是人工搬运或行车吊装,效率低下。
技术实现要素:
3.本实用新型的目的是为了克服现有技术的不足,提供一种效率高的径向挤压制管机生产线配套用钢筋骨架运送车。
4.本实用新型的目的是这样实现的:一种径向挤压制管机生产线配套用钢筋骨架运送车,包括轨道和轨道上行走的移动座,在移动座的上方通过回转机构连接回转台,在回转台上连接提升架,提升架通过提升机构连接提升座,提升座通过夹爪旋转轴承连接夹爪座,夹爪座上通过扩缩机构连接一对抓放夹爪。
5.本实用新型可以将钢筋骨架运送到指定位置,方便在流水线需要时随时抓取。具有运行速度快,定位准确,且同时可实现骨架翻转动作。本实用新型用机械手代替了人工,便于径向挤压主机行程自动化生产线,极大的提高了生产效率。
6.本实用新型在所述轨道的一侧内部连接行走链条;在所述移动座上连接行走驱动马达,行走驱动马达连接行走链轮,行走链轮与行走链条相啮合;在所述移动座上还连接大车跑轮,大车跑轮设置在轨道的另一侧内部。行走驱动马达工作带动行走链轮在行走链条上移动,实现移动座行走,大车跑轮保证移动精度。
7.本实用新型的回转机构包括连接在移动座上的回转台旋转驱动马达,回转台旋转驱动马达连接回转台小齿轮,所述回转台上设置一圈外齿,回转台的外齿与回转小齿轮相啮合,在回转台与移动座之间设置回转轴承。回转台旋转驱动马达工作带动回转小齿轮转动,从而带动回转台转动。
8.本实用新型的提升机构包括竖向的夹爪提升油缸,夹爪提升油缸的活塞杆连接横杆,横杆的两端分别连接链轮,链轮上连接提升链条,提升座与两根提升链条连接。夹爪提升油缸伸缩带动横杆升降,通过提升链条使提升座升降。
9.为了保证升降时的稳定性,在所述提升架上连接提升轨道,在所述提升座的左右两侧均连接夹爪升降跑轮,夹爪升降跑轮设置在提升轨道内;在所述提升座的左右两侧均连接夹爪升降靠轮,两根提升轨道设置在两个夹爪升降靠轮之间,夹爪升降靠轮的轴向与
夹爪升降跑轮的轴向相垂直。
10.本实用新型的扩缩机构包括夹爪驱动马达,夹爪驱动马达连接夹爪驱动齿轮,一对抓放夹爪分别连接齿条,两根齿条平行布置,两根齿条分别设置在夹爪驱动齿轮的两侧并且相啮合。夹爪驱动马达工作带动夹爪驱动齿轮转动,使两根齿条向相反方向移动,实现一对抓放夹爪同步扩大或缩小,夹持工件。
11.本实用新型的一对抓放夹爪的相向面上分别通过销轴连接夹爪体,夹爪体便于适应工件外径变化。
12.本实用新型的抓放夹爪与夹爪座之间连接直线导轨。
附图说明
13.图1为本实用新型的结构示意图。
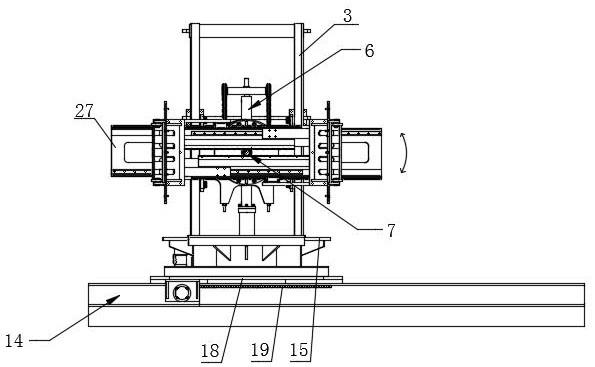
14.图2为图1的左视图。
15.图3为图1的俯视图。
16.图4为提升架与提升座连接的示意图。
17.图5为图4的俯视图。
18.图6为抓放夹爪安装在夹爪座上的示意图。
19.图7为图6的俯视图。
20.图8为回转台、移动座的安装示意图。
21.图9为图8中a-a向视图。
22.图10为图9中b-b向视图。
23.图中,1行走驱动马达,2回转台旋转驱动马达,3提升架,4液压站,5抓放夹爪,6夹爪提升油缸,7夹爪驱动马达,8提升链条,9夹爪旋转轴承,10夹爪升降跑轮,11夹爪升降靠轮,12大车跑轮,13大车行走靠轮,14轨道,15回转台,16回转轴承,17夹爪体,18移动座,19行走链条,20行走链轮,21回转小齿轮,22外齿,23横杆,24链轮,25提升座,26提升轨道,27夹爪座,28夹爪驱动齿轮,29齿条,30直线导轨,31夹爪旋转马达。
具体实施方式
24.如图1至图10所示,径向挤压制管机生产线配套用钢筋骨架运送车,包括一对轨道14和在一对轨道14上行走的移动座18,在轨道14的一侧内部连接行走链条19,在移动座18上连接行走驱动马达1,行走驱动马达1连接行走链轮20,行走链轮20与行走链条19相啮合。在移动座18上还连接四个大车跑轮12和四个大车行走靠轮13,大车跑轮12和大车行走靠轮13均设置在轨道14的另一侧内部,大车跑轮12的轴向与大车行走靠轮13的轴向相垂直。行走驱动马达1工作带动行走链轮20转动,通过行走链条19,使移动座18沿轨道14的长度方向行走,四个大车跑轮12和四个大车行走靠轮13避免移动座18上下位移或在一对轨道14的宽度方向上位移。
25.在移动座18的上方通过回转机构连接回转台15,回转机构包括连接在移动座18上的回转台旋转驱动马达2,回转台旋转驱动马达2连接回转台小齿轮21,回转台15上设置一圈外齿22,回转台15的外齿22与回转小齿轮21相啮合,在回转台15与移动座18之间设置回转轴承16。回转台旋转驱动马达2工作带动回转小齿轮21转动,通过回转台15的外齿22带动
回转台15转动。
26.在回转台15上连接提升架3,提升架3通过提升机构连接提升座25,提升机构包括竖向的夹爪提升油缸6,夹爪提升油缸6的活塞杆连接横杆23,横杆23的两端分别连接链轮24,链轮24上连接提升链条8,提升座25与两根提升链条8连接。在提升架3上连接提升轨道26,在提升座25的左右两侧均连接夹爪升降跑轮10,夹爪升降跑轮10设置在提升轨道26内。在提升座25的左右两侧均连接夹爪升降靠轮11,两根提升轨道26设置在两个夹爪升降靠轮11之间,夹爪升降靠轮11的轴向与夹爪升降跑轮10的轴向相垂直。夹爪升降跑轮10和夹爪升降靠轮11避免提升座25前后左右移动,从而保证升降时的稳定性。
27.提升座25上连接夹爪旋转马达31,夹爪旋转马达31的输出轴连接夹爪座27,夹爪座27与提升座25之间设置夹爪旋转轴承9。夹爪座27上通过扩缩机构连接一对抓放夹爪5。扩缩机构包括夹爪驱动马达7,夹爪驱动马达7连接夹爪驱动齿轮28,一对抓放夹爪5分别连接齿条29,两根齿条29平行布置,两根齿条29分别设置在夹爪驱动齿轮28的上下两侧并且相啮合,抓放夹爪5与夹爪座27之间连接直线导轨30。一对抓放夹爪5的相向面上分别通过销轴连接夹爪体17。夹爪驱动马达7工作带动夹爪驱动齿轮28转动,使两根齿条29向相反方向移动,实现一对抓放夹爪5同步扩大或缩小,夹持工件。
28.工作时,1,夹爪驱动马达驱动夹爪驱动齿轮转动,与夹爪驱动齿轮配合的两根齿条,使通过直线导轨导向的一对抓放夹爪同步扩大或缩小,夹持工件;抓放夹爪在夹爪提升油缸的作用下通过提升链条提升工件至设定高度,提升过程中有升降跑轮及靠轮保证升降时的稳定。2,移动座通过行走驱动马达沿轨道横向移动,移动时有靠轮保证移动精度,同时抓放夹爪在夹爪旋转马达作用下,使连接在夹爪旋转轴承上的夹爪总成旋转90
°
。3,回转台旋转驱动马达驱动回转机构使回转台旋转90
°
。4,抓放夹爪(夹爪体利用销轴连接在抓放夹爪上,便于适应工件外径变化)松开,放下工件,回转台回到起始位置,准备下个动作循环。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
