技术特征:
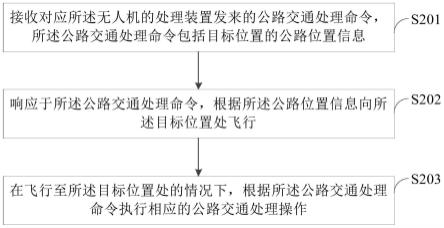
1.一种公路交通处理方法,所述方法由无人机实施,所述方法包括:接收对应所述无人机的处理装置发来的公路交通处理命令,所述公路交通处理命令包括目标位置的公路位置信息;响应于所述公路交通处理命令,根据所述公路位置信息向所述目标位置处飞行;在飞行至所述目标位置处的情况下,根据所述公路交通处理命令执行相应的公路交通处理操作。2.根据权利要求1所述的方法,其中,在所述公路交通处理命令为公路交通巡航命令的情况下,所述公路交通巡航命令还包括:公路巡航区域的第一区域位置信息;所述根据所述公路交通处理命令执行相应的公路交通处理操作,包括:根据所述第一区域位置信息,在所述公路巡航区域处飞行;在飞行于所述公路巡航区域处的过程中,获取所述公路巡航区域的公路交通信息;根据所述公路交通信息,判断所述公路巡航区域是否存在公路交通异常情况;在所述公路巡航区域存在公路交通异常情况的情况下,执行针对所述公路交通异常情况的处理操作。3.根据权利要求2所述的方法,其中,所述公路交通信息包括公路交通图像信息;所述根据所述公路交通信息,判断所述公路巡航区域是否存在公路交通异常情况,包括:根据所述公路交通图像信息,确定所述公路巡航区域中车辆的行驶状态;根据所述行驶状态,判断所述车辆是否存在异常行驶情况;所述在所述公路巡航区域存在公路交通异常情况的情况下,执行针对所述公路交通异常情况的处理操作,包括:在所述车辆存在异常行驶情况的情况下,根据所述行驶状态执行相应处理操作。4.根据权利要求3所述的方法,其中,所述根据所述公路交通图像信息,确定所述公路巡航区域中车辆的行驶状态,包括:根据所述公路交通图像信息,确定所述公路巡航区域中车辆的行车数据;根据所述行车数据,确定所述车辆的行驶状态。5.根据权利要求4所述的方法,其中,所述行车数据包括车速、行车方向、车头朝向、车辆与车道线间的位置关系、车辆图像中的至少一个;所述行驶状态为超速行驶、低速行驶、事故停车、非事故停车、倒车、逆行、压线偏航行驶中的任意一个状态。6.根据权利要求3所述的方法,其中,所述根据所述行驶状态执行相应处理操作,包括:在所述行驶状态为目标状态的情况下,向所述处理装置发送对应所述目标状态的公路交通应急通知,所述公路交通应急通知包括公路交通事故位置的第二区域位置信息,以使所述处理装置通过处理所述公路交通应急通知,向所述处理装置对应的其他无人机下发对应所述第二区域位置信息的公路交通应急命令;在所述行驶状态为区别于所述事故停车状态的其他状态的情况下,向所述车辆的临近位置处飞行,并在飞行至所述临近位置处的情况下,对所述车辆执行对应所述其他状态的告警提醒;其中,所述目标状态包括事故停车状态、非事故停车状态、倒车状态、逆行状态中任意
一个。7.根据权利要求2所述的方法,其中,所述公路交通信息包括所述无人机所在环境的公路交通声音信息;所述根据所述公路交通信息,判断所述公路巡航区域是否存在公路交通异常情况,包括:将所述公路交通声音信息与预设的交通事故声音信息进行对比,得到所述公路交通声音信息和所述交通事故声音信息的匹配度;在所述匹配度不低于预设匹配度阈值的情况下,向所述处理装置发送公路交通应急通知,所述公路交通应急通知包括公路交通事故位置的第二区域位置信息,以使所述处理装置通过处理所述公路交通应急通知,向所述处理装置对应的其他无人机下发对应所述第二区域位置信息的公路交通应急命令。8.根据权利要求1所述的方法,其中,所述公路交通处理命令为公路交通应急命令;在目标公路区域的行驶方向上,对应所述公路交通应急命令的公路交通事故位置在所述目标位置的前方;所述目标公路区域为包括所述目标位置和所述公路交通事故位置的公路区域。9.根据权利要求8所述的方法,其中,所述根据所述公路交通处理命令执行相应的公路交通处理操作,包括:在所述公路交通应急命令还包括朝向信息的情况下,控制所述无人机的激光引导装置按照与所述朝向信息对应的方向发射激光;和/或,控制所述无人机的声光示警装置进行声光示警;和/或,在所述公路交通应急命令还包括限速值的情况下,控制所述无人机的激光投影装置进行激光投影,在公路地面上标识所述限速值。10.根据权利要求8所述的方法,其中,所述根据所述公路交通处理命令执行相应的公路交通处理操作,包括:在所述公路交通事故位置在目标方向上的长度小于预设长度阈值的情况下,检测目标车辆与所述无人机间的目标距离,所述目标方向为垂直于所述行驶方向且平行于公路地面的方向,所述目标车辆为行驶于所述目标公路区域中,且在所述行驶方向上位于所述无人机后方的车辆;对比所述目标距离和预设距离阈值;在所述目标距离不大于所述预设距离阈值的情况下,执行用于标识车辆抵近的告警处理,并触发位于所述公路交通事故位置处的预警装置执行预警提醒处理。11.根据权利要求1所述的方法,其中,所述方法还包括:接收所述处理装置发来的广播命令;响应于所述广播命令,利用所述无人机的扬声器播报所述广播命令所携带的音频信息。12.根据权利要求1至11中任一所述的方法,其中,所述方法还包括:监测所述无人机的电量;在所述电量低于预设电量的情况下,向所述处理装置发送换岗请求,以使所述处理装置通过处理所述换岗请求,控制向所述处理装置对应的另一无人机下发所述公路交通处理
命令;接收所述处理装置在接收到所述另一无人机返回的换岗完成通知的情况下发来的同意换岗通知;响应于所述同意换岗通知执行返航处理。13.一种无人机,包括存储器和处理器,所述存储器用于存储计算机程序;所述处理器用于执行所述计算机程序,以实现根据权利要求1-12中任意一项所述的方法。14.一种公路交通处理系统,包括:至少一个如权利要求13所述的无人机和对应至少一个所述无人机的处理装置;所述处理装置,用于向所述无人机发送所述公路交通处理命令。15.根据权利要求14所述的系统,其中,所述处理装置,用于确定所述处理装置对应的公路区域;根据所述公路区域的区域划分信息,确定所述公路区域包括的至少一个公路巡航区域;对于所述至少一个公路巡航区域中的选定公路巡航区域,确定对应所述选定公路巡航区域的选定无人机;生成包括所述选定公路巡航区域的第一区域位置信息的公路交通巡航命令;以所述公路交通巡航命令作为所述公路交通处理命令发送给所述选定无人机。16.根据权利要求14所述的系统,其中,所述处理装置,用于在接收到外部发来的公路交通应急通知的情况下,根据所述公路交通应急通知包括的公路交通事故位置的第二区域位置信息,生成至少一个公路交通应急命令;以所述公路交通应急命令作为所述公路交通应急命令,将所述至少一个公路交通应急命令一一对应的发送给所述处理装置对应的至少一个所述无人机。17.根据权利要求16所述的方法,其中,所述系统包括至少两个所述无人机;所述处理装置,用于生成至少两个所述公路交通应急命令,不同所述公路交通应急命令包括的目标位置的公路位置信息不同;其中,在包括所述目标位置和所述公路交通事故位置的目标公路区域的行驶方向上,所述公路交通事故位置在所述目标位置的前方;在所述公路交通事故位置在目标方向上的长度不小于预设长度阈值的情况下,各个所述公路交通应急命令包括的目标位置沿所述行驶方向呈矩阵式分布;其中,所述目标方向为垂直于所述行驶方向且平行于公路地面的方向;在所述公路交通事故位置在所述目标方向上的长度小于所述预设长度阈值的情况下,各个所述公路交通应急命令包括的目标位置在所述行驶方向上呈斜线分布。18.根据权利要求14所述的系统,其中,所述处理装置包括示警模块;所述处理装置,用于在接收到外部发来的公路交通应急通知的情况下,根据所述公路交通应急通知包括的公路交通事故位置的第二区域位置信息,控制所述示警模块执行相应示警处理;在包括所述公路交通事故位置的公路区域的行驶方向上,所述示警模块设置于所述公路交通事故位置的后方位置处。19.根据权利要求14所述的系统,其中,所述处理装置包括无人机存储仓;对于所述公路交通处理命令包括的目标位置的公路位置信息,所述无人机存储仓设置于包括所述目标位置的公路区域的临近位置处;所述无人机存储仓用于存储所述无人机,并对存储的无人机充电。
20.根据权利要求14所述的系统,其中,所述系统还包括车载无人机:所述车载无人机,用于监测所述车载无人机所在车辆是否发生公路交通事故,在监测到所述车载无人机所在车辆发生公路交通事故的情况下,向所述处理装置发送公路交通应急通知。21.一种计算机可读存储介质,所述计算机可读存储介质上存储计算机程序,所述计算机程序在被处理器执行时实现根据权利要求1-12中任意一项所述的方法。
技术总结
本公开涉及一种公路交通处理方法、装置及系统,该方法包括:无人机接收对应所述无人机的处理装置发来的公路交通处理命令,所述公路交通处理命令包括目标位置的公路位置信息;响应于所述公路交通处理命令,根据所述公路位置信息向所述目标位置处飞行;在飞行至所述目标位置处的情况下,根据所述公路交通处理命令执行相应的公路交通处理操作。行相应的公路交通处理操作。行相应的公路交通处理操作。
技术研发人员:李治廷 周华 李林
受保护的技术使用者:比亚迪股份有限公司
技术研发日:2020.12.15
技术公布日:2022/6/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。