1.本发明涉及用于在通信网络中提供用于在交通参与者与至少一个另外的交通参与者之间协调机动动作的机动动作消息的一种方法、一种分析评价单元、一种计算机程序和一种计算机可读的介质。
背景技术:
2.对于彼此联网的车辆的自动化控制而言必需的是:所述车辆感知并解读其周围环境,以便能够做出决定。现代车载传感器——例如摄像机、雷达传感器或者激光雷达传感器——的作用范围或者视场例如可以借助车对行人(v2p)、车对车(v2v)、车对电网(v2g)或者车对网络的通信来扩展,亦统称为v2x通信。
3.cooperative awareness(协同感知)或者collective perception(基体感知)等服务使得如此的智能交通系统(its)的站点可以相互交换关于其自身状态和通过车载传感器所识别到的对象的状态的信息,所述站点由此能够明显更好地感知其周围环境。然而,所提及的服务主要涉及对象的过去的和目前的状态。然而,周围环境模型是高度动态的,并且除了过去的和目前的状态之外还估计对象的未来的状态,以便能够对应地规划机动动作。因此,如果站点能够查阅相邻站点的所规划的机动动作,则是有利的。以这些知识,在某些情况下能够显著地提高在周围环境模型中估计未来的状态时的精度。
4.目前,欧洲电信标准化协会(etsi)开发一种机动动作协调服务(maneuver coordination service或mcs),这除了其他因素外通过公共资助的项目imagine来推动,另见:项目“imagine(intelligent maneuver automation-cooperative hazard avoidance in realtime)”,https://imagine-online.de/en/;i.llatser,t.michalke,m.dolgov,f.wildsch
ü
tte,h.fuchs,“cooperative automated driving use cases for 5g v2x communication”,submitted to ieee 5g world forum,2019。
5.该机动动作协调服务基于可能的轨迹在智能交通系统的站点之间的交换,并且应能够对站点的所规划的轨迹进行相互协调和统一。为此,可以给可能的轨迹配属成本,所述成本显示轨迹对于车辆而言是有多么有利的,如例如在de 10 2018 109 883 a1和de 10 2018 109 885 a1中描述的那样。如此评估的轨迹可以在所谓的机动动作协调消息(maneuver coordination message或mcm)中周期性地传输。
技术实现要素:
6.在此背景下,以在此所提出的方案提出根据独立权利要求所述的用于在通信网络中提供用于在交通参与者与至少一个另外的交通参与者之间协调机动动作的机动动作消息的一种方法、一种分析评价单元、一种计算机程序和一种计算机可读的介质。在此所提出的方案的有利的扩展方案和改善从说明书中得出并在从属权利要求中描述。
7.本发明的优点
8.本发明的实施方式使得能够以有利的方式在遵守特定的规则的情况下生成机动动作协调消息,其方式是将优先级分配给各个轨迹和附属的描述数据。然后能够根据优先级选择待传输的轨迹,例如通过基于优先级的传输协议,亦称dcc(decentralized congestion control,分散式拥塞控制),该传输协议根据v2x信道负载从具有优先级的轨迹中选择待传输的轨迹。换言之,该传输协议能够实现如下规则:根据待传输的消息内容控制机动动作协调消息的传输频率。由此能够改善彼此联网的多个交通参与者之间的机动动作协调。
9.本发明的第一方面涉及一种用于在通信网络中提供用于在交通参与者与至少一个另外的交通参与者之间协调机动动作的机动动作消息的方法。该交通参与者和所述至少一个另外的交通参与者经由通信网络彼此联网。该交通参与者包括分析评价单元,该分析评价单元用于对经由通信网络所接收到的通信数据和/或对通过用于检测该交通参与者的周围环境的传感装置所产生的传感器数据进行分析评价并且用于经由通信网络传输机动动作消息。该方法包括以下步骤:在分析评价单元中接收通信数据和/或传感器数据;基于所述通信数据和/或所述传感器数据确定所述交通参与者的至少一个可能的轨迹,其中,求取至少一个描述所述至少一个可能的轨迹的特性的轨迹参数;由所述轨迹参数计算轨迹传输优先级,其中,该轨迹传输优先级代表所述至少一个可能的轨迹对于所述交通参与者和/或所述另外的交通参与者而言的相关性;根据该轨迹传输优先级确定是否应将所述至少一个可能的轨迹记录到机动动作消息中;若是:生成具有所述至少一个可能的轨迹的机动动作消息并经由通信网络发送该机动动作消息。
10.交通参与者例如可以理解为机动车、交通基础设施元素(亦称路侧单元)、自行车、踏板车(tretroller)或者行人,所述机动车例如是载客汽车、载重汽车、公共汽车或者摩托车。
11.分析评价单元例如可以是交通参与者——例如车辆——的车载计算机的部件。此外,分析评价单元可以实施为用于基于所述通信数据和/或所述传感器数据来控制该交通参与者,例如对该交通参与者进行转向、制动和/或加速。为此,该交通参与者可以具有执行装置,该执行装置可以通过分析评价单元来操控。执行装置例如可以包括转向执行器或者制动执行器或者马达控制器。分析评价单元也可以实施为用于基于由其他交通参与者提供且经由通信网络所接收到的机动动作消息来控制所述交通参与者。
12.传感装置例如可以包括摄像机、雷达传感器或者激光雷达传感器。
13.通信网络可以理解为用于交通联网的网络,例如从车到车(v2v或car2car)、从车到路(v2r)、从车到基础设施(v2i)、从车到网络(v2n)或者从车到人(v2p)。例如,机动动作消息可以通过无线通信连接在通信网络的参与者之间传输,所述无线通信连接例如是wlan连接、蓝牙连接或者移动无线电连接。
14.机动动作消息可以包含例如对所述交通参与者的说明,例如对该交通参与者的转向角度、位置、方向、速度或者自动化程度的说明,以及包含可能的轨迹的列表。
15.可能的轨迹可以理解为预测的车辆走向,例如位置、速度、加速度和/或方向关于时间的走向,该预测的车辆走向是基于该交通参与者的过去的、当前的和/或所估计的未来的状态和/或在该交通参与者的周围环境中的所识别到的对象所计算出的。所述计算例如可以通过周围环境模型来实现。
16.根据轨迹传输优先级例如能够确定,该可能的轨迹是否应记录到待传输的轨迹的列表中。在此可以生成具有待传输的轨迹的列表的机动动作消息。
17.本发明的第二方面涉及一种分析评价单元,该分析评价单元实施为用于执行在上文及下文中所描述的方法。在上文及下文中所描述的方法的特征也可以是分析评价单元的特征。
18.本发明的另外的方面涉及一种计算机程序,当在处理器上执行该计算机程序时,该计算机程序执行在上文及下文中所描述的方法,以及涉及一种计算机可读的介质,在该介质上存储有这种类型的计算机程序。
19.计算机可读的介质例如可以是硬盘、usb存储设备、ram存储器、rom存储器、eprom存储器或者闪存存储器。计算机可读的介质还可以是能够实现程序代码的下载的数据通信网络,例如互联网。计算机可读的介质可以是暂时性的,也可以是非暂时性的。
20.在上文及下文中所描述的方法的特征也可以是计算机程序的和/或计算机可读的介质的特征。
21.关于本发明的实施方式的思想除了其他因素外可以视为基于以下所描述的构思和知识。
22.根据一种实施方式,可以确定成本,所述成本显示可能的轨迹对于交通参与者而言的效益。在此可以由所述成本计算轨迹传输优先级。通过所述成本能够量化该可能的轨迹对于所述交通参与者而言的在功能上的效益。例如可以是:成本越低则该轨迹传输优先级级越高。
23.附加或替代地可以确定配属给该可能的轨迹的数据量,并由该数据量计算轨迹传输优先级。对于描述该可能的轨迹所需的数据量使得能够实现推断出该可能的轨迹的细节度,例如能够推断出轨迹长度或者轨迹走向的复杂性,该轨迹走向例如可以通过多项式函数来描述。例如可以是:配属给该可能的轨迹的数据量越小则该轨迹传输优先级级越高。
24.附加或替代地可以确定自从上一次发送关于可能的轨迹的机动动作消息以来的等待时间,并且可以由该等待时间计算轨迹传输优先级。例如可以是:等待时间越长则该轨迹传输优先级级越高。
25.附加或替代地可以将可能的轨迹配属给具有不同机动动作优先级的多个不同机动动作类别中的一个机动动作类别,并且可以由配属给可能的轨迹的机动动作类别的机动动作优先级计算轨迹传输优先级。例如可以是:配属给该可能的轨迹的机动动作类别的机动动作优先级越高则该轨迹传输优先级级越高。
26.根据一种实施方式,可以基于通信数据和/或传感器数据识别交通参与者的周围环境中的对象。在此可以根据所识别到的对象确定至少一个可能的轨迹。
27.根据一种实施方式,可以为至少一个所识别到的对象确定至少一个对象轨迹。能够基于对象轨迹确定可能的轨迹是否是无碰撞的。如果可能的轨迹是无碰撞的,则能够确定可能的轨迹与所有对象轨迹之间的最小轨迹距离并且能够由该最小轨迹距离计算轨迹传输优先级。例如可以是:最小轨迹距离越小则该轨迹传输优先级级越低。如果可能的轨迹不是无碰撞的,则能够附加或替代地基于可能的轨迹和与该可能的轨迹碰撞的至少一个轨迹确定直至所述交通参与者的可能的碰撞前的最短时间间隔,亦称time to collision(碰撞时间,ttc),并且能够由直至所述交通参与者的可能的碰撞前的最短时间间隔计算轨迹
传输优先级。例如可以是:最小ttc越长则该轨迹传输优先级级越低。
28.根据一种实施方式,可以计算可能的轨迹与对象轨迹之间的相对速度和/或相对加速度,即在特定的时间点绝对速度或绝对加速度之间的差。然后能够由所述相对速度和/或所述相对加速度计算出轨迹传输优先级。例如可以是:相对速度和/或所述相对加速度越高则该轨迹传输优先级级越高。
29.根据一种实施方式,可以根据所识别到的对象确定交通参与者的多个可能的轨迹。可以为每个可能的轨迹确定成本,所述成本显示所述可能的轨迹对于所述交通参与者而言的效益。此外,可以为每个所识别到的对象确定至少一个对象轨迹。能够基于所述对象轨迹确定所述可能的轨迹是否是与所述对象轨迹无碰撞的。基于成本并且基于“所述可能的轨迹是否是无碰撞的”能够将可能的轨迹划分为参考轨迹、需求轨迹和/或替代轨迹,其中,所述参考轨迹相互之间是无碰撞的,所述需求轨迹不是与至少一个参考轨迹无碰撞的并且具有比参考轨迹更低的成本,而替代轨迹不是与至少一个参考轨迹无碰撞的并且具有比参考轨迹更高的成本。为参考轨迹所计算出的轨迹传输优先级可以比为需求轨迹和替代轨迹所计算出的轨迹传输优先级更高。
30.参考轨迹可以理解为具有成本c
rt
的轨迹,所述交通参与者当前遵循该轨迹。只要可能的碰撞能够基于交通规则被解决,则该参考轨迹可以被视为是无碰撞的。
31.需求轨迹可以理解为具有成本cr《c
rt
的轨迹。在某些情况下,需求轨迹可能妨碍其他交通参与者的轨迹,这可能使得需要在交通参与者之间进行相应的协调。因此,需求轨迹可以理解为协同期望。如果需求轨迹与其他交通参与者的参考轨迹碰撞,该需求轨迹已发送给所述其他交通参与者,则例如可以在机动动作协调的框架下改变所涉及的参考轨迹,使得需求轨迹与其不再发生碰撞。在这种情况下,对于已发送需求轨迹的交通参与者而言,需求轨迹可以变成参考轨迹。
32.替代轨迹可以理解为具有成本cr》c
rt
的轨迹。替代轨迹可以被视为用于其他交通参与者的协同提议。
33.根据上文更前的部分所提及的imagine方案,例如,所有交通参与者传输其对应的参考轨迹和至少一个替代轨迹或者需求轨迹。所传输的替代轨迹或者需求轨迹的数量可以根据驾驶员的协同准备或者根据外部因素如汽车制造商或者规章而变化。
34.一方面,这种类型的机动动作协调服务提供如下优点:能够基于所提供的参考轨迹显著改善参与的交通参与者的周围环境模型。另一方面,可以使机动动作相互配合,并且因此增加交通效率和交通安全性。交通参与者相互通信所用的v2x信道的负荷可以尤其根据轨迹的相应的数量、相应的细节度和相应的传输频率而变化。在某些情况下,增加的信道负载可能导致v2x通信的功率降低,这又可能导致机动动作协调服务以及可能其他v2x服务也是仅有限可用的。尤其是,增加的信道负载可能导致更大的延迟、更小的作用范围和更低的可靠性。通过有针对性地选择待传输的参考轨迹、需求轨迹或者替代轨迹可以在最大程度上避免该问题。
35.根据一种方式,可以由需求轨迹的数量和替代轨迹的数量计算比例值。可以将该比例值与比较值进行比较。如果该比例值大于比较值,则为替代轨迹计算出比为需求轨迹计算更高的轨迹传输优先级。如果比例值小于比较值,则为需求轨迹计算出比为替代轨迹计算更高的轨迹传输优先级。该比较值例如可以是平衡常数,该平衡常数代表需求轨迹与
替代轨迹之间的经平衡的比例。换言之,该比较值可以表达如下比例:在该比例的情况下,需求轨迹和替代轨迹是被同等地加权的。
36.根据一种实施方式,可以在分析评价单元中接收由另外的交通参与者经由通信网络所发送的多个另外的轨迹。能够基于所述另外的轨迹确定与所述可能的轨迹发生碰撞的轨迹的类型和/或数量。能够由与所述可能的轨迹发生碰撞的轨迹的类型和/或数量计算出轨迹传输优先级。由此能够根据另外的交通参与者——例如相邻车辆——的轨迹计算出轨迹传输优先级。因此能够提高该方法的精度和可靠性。
37.根据一种实施方式,所述另外的轨迹可以包括如上文更前的部分所详细描述的那样的参考轨迹、需求轨迹和/或替代轨迹。在此,能够由参考轨迹的数量、需求轨迹的数量和/或替代轨迹的数量计算出轨迹传输优先级。换言之,能够计数:例如从在该交通参与者的周围环境中的相邻车辆接收了多少参考轨迹、需求轨迹和/或替代轨迹。然后能够由对应的数量或由对应的数量的组合推断出该可能的轨迹的相关性。
38.根据一种实施方式,可以基于通信数据和/或传感器数据确定交通参与者的至少一个附加的可能的轨迹。在此可以求取描述所述附加的可能的轨迹的特性的至少一个附加的轨迹参数。然后能够由所述附加的轨迹参数计算附加的轨迹传输优先级,该附加的轨迹传输优先级代表该附加的可能的轨迹对于交通参与者和/或另外的交通参与者而言的相关性。此外,可以将所述轨迹传输优先级与所述附加的轨迹传输优先级彼此进行比较。如果附加的轨迹传输优先级大于轨迹传输优先级,可以确定可能的轨迹与附加的可能的轨迹之间的最小偏差,例如两个轨迹中的位置、速度或者加速度之间的最小差。随后能够基于该最小偏差重新计算出轨迹传输优先级。例如可以是:最小偏差越大则该轨迹高优先级级越高。因此,除了其他因素外还能够实现:优先传输明显彼此不同的轨迹。
附图说明
39.以下参照所附示图描述本发明的实施方式,其中,既不应将示图也不应将说明书解释为对本发明进行限制。
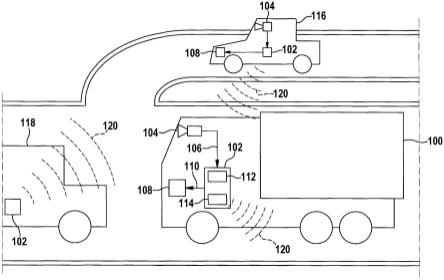
40.图1示意性示出具有根据本发明的一个实施例的分析评价单元的车辆。
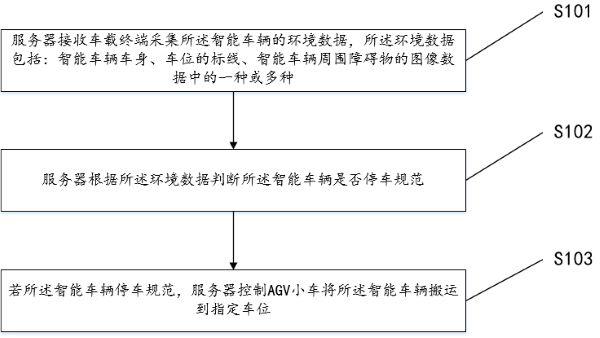
41.图2示出根据本发明的一个实施例的方法的流程图。
42.图3示意性示出基于图2中的方法的机动动作协调。
43.所述附图仅仅是示意性的并且不是按比例的。附图中的相同参考标记表示相同或具有相同效果的特征。
具体实施方式
44.图1示出具有分析评价单元102的车辆100,该分析评价单元与车辆100的传感装置104连接,以便处理由传感装置104所产生的传感器数据106。传感装置104实施为用于监控车辆100的周围环境。例如,传感装置104在此实现为摄像机。然而,传感装置104也可以包括多个不同类型的传感器单元。因此,附加或替代于摄像机,传感装置104可以具有例如至少一个雷达传感器、激光雷达传感器或者超声波传感器或者v2x通信系统。
45.另外,分析评价单元102与车辆100的执行装置108连接。执行装置108例如可以包括转向执行器或者制动执行器或者用于马达控制的执行器。分析评价单元102可以实施为
基于传感器数据106产生用于操控执行装置108的控制信号110,以便自动化地控制车辆100,即对该车辆进行转向、制动、加速或者根据数字地图中的预给定的路线导航。附加或替代地,分析评价单元102可以实施为基于传感器数据106产生用于驾驶员信息的信号。
46.分析评价单元102包括分析评价模块112和与该分析评价模块连接的通信模块114,该通信模块配置为用于经由通信网络传输数据。通信网络将车辆100与另外的车辆116、118联网,例如通过无线通信连接。模块112、114可以在硬件和/或软件中实施。
47.分析评价模块112配置为用于从传感装置104接收传感器数据106并且处理和分析评价这些传感器数据用于识别车辆100的周围环境中的对象。在该示例中,分析评价模块112基于传感器数据106识别另外的车辆116、118。例如,分析评价模块112识别另外的车辆116、118的相应的位置、速度和对象类别。此外,分析评价模块112在考虑所述位置、速度和对象类别的情况下计算车辆100的至少一个可能的轨迹,其中,确定更详细地描述所述可能的轨迹的特性的至少一个轨迹参数。分析评价模块112基于该轨迹参数计算轨迹传输优先级p
t
,该轨迹传输优先级显示该可能的轨迹对于车辆100而言的或者也对于另外的车辆116、118而言多么相关、例如多么有用。分析评价模块112根据轨迹传输优先级p
t
的高度确定,该可能的轨迹是否应记录到待传输的轨迹的列表中。替代地,具有优先值的轨迹列表被发送至通信模块114,并且通信模块114例如基于信道载荷判断实际上发送多少轨迹和发送哪些轨迹。最后,通信模块114从完成的列表中创建机动动作消息120,并且将该机动动作消息经由通信网络发送给另外的车辆116、118。这些另外的车辆可以与车辆100类似地配置为用于通过传感器来识别与其对应的周围环境并且经由通信网络发送相应的机动动作消息120。借助机动动作消息120例如可以在车辆100、116、118之间协调机动动作,如在图3中根据车辆100、116示例性示出的那样。
48.图2示出方法200的流程图,该方法例如可以由图1中的分析评价单元102来执行。
49.在此,在第一步骤210中接收传感器数据106。
50.在第二步骤220中基于传感器数据106执行对象识别。
51.在第三步骤230中基于所识别出的对象计算车辆100的至少一个可能的轨迹。在此,确定关于所计算出的轨迹的以下轨迹参数中的至少一个轨迹参数:可能的轨迹的成本c
t
,描述该可能的轨迹所需的数据量d
t
,自从上一次发送关于该可能的轨迹的机动动作消息以来的等待时间δ
t
,配属给该可能的轨迹的机动动作类别的机动动作优先级pm,直到该可能的轨迹与其他轨迹的可能的碰撞的最短时间间隔ttc,该可能的轨迹与其他轨迹之间的最小轨迹距离d
min
和/或由此推导出的至少一个参量的最大距离和/或由此推导出的至少一个参量的最大距离可能的轨迹的类型和/或数量n,所接收到的轨迹的类型和/或数量
×
,该可能的轨迹与具有更高的轨迹传输优先级p
t
的其他可能的轨迹的最小偏差δ
min
。
52.在第四步骤240中,基于至少一个轨迹参数确定关于该可能的轨迹的轨迹传输优先级p
t
。
53.在第五步骤250中,根据轨迹传输优先级p
t
确定该可能的轨迹是否应是机动动作消息的主题。
54.若是,则在步骤260a中将该可能的轨迹记录到待传输的轨迹的列表中。然后,从该列表中生成机动动作消息120。
55.若否,则在步骤260b中从待传输的轨迹的列表中排除该可能的轨迹。然后,例如无轨迹地生成机动动作消息120。
56.例如可以是:车辆100的轨迹规划器提供具有其对应的成本c
t
的不同的可能的轨迹。对于每个轨迹,计算轨迹传输优先级p
t
,该轨迹传输优先级除了其他因素外还与以下标准或者说参数有关。
57.1.该轨迹的成本c
t
有多高?
58.每个轨迹的成本c
t
例如由机动动作规划器来估计。成本c
t
越低,则该轨迹的效益越大且该轨迹的轨迹传输优先级p
t
越大。
[0059][0060]
换言之,如此选择轨迹传输优先级p
t
,使得在其他方面条件保持相同的情况下轨迹传输优先级随着轨迹的成本c
t
的增加而减小或不进一步增加。
[0061]
2.这是哪种轨迹类型?
[0062]
基于其对应的成本c
t
并且基于“所述可能的轨迹是否是无碰撞的”,能够将所述轨迹划分为参考轨迹、需求轨迹和替代轨迹,如上文更前的部分已描述的那样。
[0063]
应总是传输参考轨迹(ref)。参考轨迹因此获得最高的轨迹传输优先级p
t
。相应于替代轨迹(alt)和需求轨迹(req)相互之间的比例来选择替代轨迹和需求轨迹的轨迹传输优先级p
t
:
[0064][0065]
换言之,如此选择轨迹传输优先级p
t
,使得在其他方面条件保持相同的情况下参考轨迹具有比替代轨迹和需求轨迹更高的轨迹传输优先级p
t
。在此,当需求轨迹的数量n
req
与替代轨迹的数量n
alt
之间的比例大于或者等于特定的平衡常数时,替代轨迹具有至少与需求轨迹同样高的传输优先级。如果该比例小于该平衡常数,则反过来需求轨迹具有比替代轨迹更高的传输优先级。
[0066]
3.需要多少数据量来描述该轨迹?
[0067]
描述轨迹时的细节度越高,由此导致的信道负载通常就越高。例如可以是:在低信道负载的情况下,所有轨迹以独立于其对应的轨迹传输优先级p
t
地被传输。在高信道负载的情况下,可以降低数据量大的轨迹的轨迹传输优先级p
t
,以降低信道负载。换言之,描述轨迹所需的数据量d
t
越高,可以选择越低的轨迹传输优先级p
t
:
[0068][0069]
换言之,轨迹传输优先级p
t
在其他方面条件保持相同的情况下随着数据量的增加而减小或不进一步增加。
[0070]
4.自从上一次传输轨迹以来过去了多长时间?
[0071]
相邻的车辆116、118未被告知相关轨迹的时间越长,则与此相关的轨迹传输优先
级p
t
应越高:
[0072][0073]
换言之,在其他方面条件保持相同的情况下轨迹传输优先级p
t
随着与上一次传输的时间间隔δt的增加而升高。
[0074]
5.如果该轨迹是无碰撞的,该轨迹对于其他车辆而言有多么相关?
[0075]
轨迹传输优先级p
t
可以根据其他车辆116、118相对于该轨迹的状态来计算。在此,与其他车辆116、118隔开较小距离d
min
(t)地延伸的轨迹获得相应较高的轨迹传输优先级p
t
。该距离d
min
(t)可以定义为在车辆100的周围环境模型中的对象的未来位置与针对未来相关时间段的每个时间步长所考察的轨迹之间的最小距离。也考虑d
min
(t)的影响该车辆与其他对象的碰撞风险的一阶导数和更高阶导数,例如相对速度或者相对加速度或者相对加速度
[0076]
换言之,在其他方面条件保持相同的情况下,遵循该轨迹的本车辆100与所有其他交通参与者之间的(预期的)最小距离越小,轨迹传输优先级p
t
越高。此外,在其他方面条件保持相同的情况下如此选择轨迹传输优先级p
t
,使得该轨迹传输优先级随着最大相对速度和/或由此推导出的参量的增加而增加或不减小。
[0077]
6.如果该轨迹与其他车辆的至少一个轨迹碰撞,则有多长时间可用于机动动作协调?
[0078]
为此,求取直至该轨迹与所有其他碰撞轨迹之间的碰撞前的最短时间,亦称time to collision(碰撞时间)或者ttc。直至碰撞前的时间越短,轨迹传输优先级p
t
越高:
[0079][0080]
换言之,在其他方面条件保持相同的情况下轨迹传输优先级p
t
随着直至碰撞前的时间的增加而减小或不增加。
[0081]
7.哪种轨迹类型的多少轨迹与该轨迹碰撞?
[0082]
所考察的轨迹的轨迹传输优先级p
t
不仅与所考察的轨迹自身的轨迹类有关型,还与与该轨迹发生碰撞的轨迹的数量和类型有关。如果该轨迹例如与由其他车辆116、118传输给车辆100的一个参考轨迹(x
ref
=1)、两个需求轨迹(x
req
=2)和一个替代轨迹(x
alt
=1)碰撞,则该轨迹获得比其与仅一个替代轨迹(x
alt
=1)碰撞时更高的轨迹传输优先级p
t
。一般来说,与参考轨迹碰撞对轨迹传输优先级p
t
的影响比与替代轨迹和需求轨迹碰撞对该轨迹传输优先级的影响更强或者至少同样强。另外,与特定轨迹类型的轨迹的碰撞的数量越大,轨迹传输优先级p
t
越高。
[0083][0084]
换言之,轨迹传输优先级p
t
随着与替代轨迹和需求轨迹碰撞的数量的增加而升
高。
[0085]
同样,轨迹传输优先级p
t
随着与参考轨迹碰撞的数量的增加而升高,其中,参考轨迹对轨迹传输优先级p
t
的影响至少与替代轨迹和需求轨迹的影响同样大。
[0086]
8.通过该轨迹描述哪个机动动作类别?
[0087]
基于该轨迹的机动动作可以配属于具有机动动作优先级pm的特定机动动作类别。在其他方面条件保持相同的情况下轨迹传输优先级p
t
随着机动动作优先级pm的增加而升高。
[0088][0089]
9.该轨迹怎样区别于具有更高的轨迹传输优先级p
t
的轨迹?
[0090]
一般来说,在多个车辆之间进行协同的场景下,传输与具有更高轨迹传输优先级p
t
的其他轨迹近似描述相同的未来状态的轨迹不如传输明确的轨迹有意义。如果多个轨迹是相似的,则在所述多个轨迹中辨识具有最大轨迹传输优先级的轨迹t
max
。然后,减小除了t
max
之外的所有相似轨迹的轨迹传输优先级p
t
。轨迹与t
max
的差别δ
min
越小,轨迹传输优先级p
t
越低。
[0091][0092]
换言之,在其他方面条件保持相同的情况下,轨迹传输优先级p
t
随着与所有其他待传输的轨迹的偏差的增加而升高。
[0093]
轨迹的具有其对应的轨迹传输优先级p
t
的列表例如周期性地传送给通信模块114中的基于优先级的dcc协议,该dcc协议根据轨迹传输优先级p
t
和当前的信道负荷选择在机动动作消息120中应传输哪些轨迹。
[0094]
如果由于高信道负荷而例如仅能够传输一个参考轨迹,则可以告知其他车辆116、118该情况。其他车辆116、118例如可以获得关于如下内容的信息:车辆100规划机动动作,并且虽然需求轨迹是可用的,但是所述需求轨迹由于高信道负荷不能够被传输。
[0095]
图3示例性示出图1中的两个车辆100、116之间的机动动作协调。车辆中的每个车辆都配备有传感装置104和分析评价单元102。车辆的可能的轨迹用实线标记。可能的轨迹的对应成本作为正小数或者负小数示出。
[0096]
车辆100在时间点a发送一个参考轨迹300和两个替代轨迹301、302。另外的车辆116正想驶入车辆100所在的高速公路。正在驶入的车辆116发送一个参考轨迹303。
[0097]
该正在驶入的车辆116在时间点b识别到协同需求,并且与此对应地计算和发送两个需求轨迹304、305,所述需求轨迹相对于由车辆100所发送的替代轨迹301、302是无碰撞的。
[0098]
车辆100在时间点c接收具有最低成本的需求轨迹305,并且相应地适配其参考轨迹300。正在驶入的车辆116选择需求轨迹305作为该车辆的新的参考轨迹。
[0099]
所提及的轨迹例如在可以借助图2中的方法生成的机动动作消息120中传输。
[0100]
最后需要指出的是,诸如“具有”“包括”等术语并不排除另外的元素或步骤,并且诸如“一”或“一个”之类的术语并不排除多个。权利要求书中的参考标记不应被视为限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。