gnss驱动控制装置、gnss控制器、作业机械以及gnss驱动控制方法
技术领域
1.本公开涉及gnss驱动控制装置、gnss控制器、作业机械以及gnss驱动控制方法。
2.本技术对于2019年11月5日在日本提出申请的特愿2019-201038号主张优先权,此处引用其内容。
背景技术:
3.在专利文献1中公开了一种能够进行监视器画面显示并且能够防止触摸面板上的误操作输入的作业机械用触摸面板监视器的输入控制方法。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2015―202841号公报
技术实现要素:
7.发明将要解决的课题
8.已知有一种作业机械,其搭载有能够测量全局位置、方位的gnss(global navigation satellite system)控制器。通常,该gnss控制器在作业机械的键接通、即发动机起动的同时接通电源而起动,在作业机械的键断开、即发动机停止的同时断开电源。
9.通常,gnss控制器在刚起动之后从多个卫星接收信号而进行初始化。在该初始化中,根据卫星信号的接收状态,有时需要几分钟左右的时间。
10.例如在与位于现场周边的其他作业者与交谈时等,作业机械的操作人员暂时将作业机械键断开。这种情况下,对应于键断开操作,不仅作业机械断开电源,gnss控制器也断开电源。于是,即使在交谈完毕之后立即进行键接通操作,也会执行gnss控制器的起动以及gnss控制器的初始化,因此到能够接收初始化后的适当的位置信息为止需要时间。
11.针对上述那样的课题,也考虑与作业机械的键断开操作无关地对于gnss控制器独立地进行电源断开操作。但是,这样会在结束了一天的作业的操作人员下作业机械的发动机停止之后忘记了切断gnss控制器的电源的情况下,gnss控制器的电源仍然接通,存在消耗作业机械的电池的课题。
12.鉴于上述的课题,本公开提供在暂时的作业机械的键断开之后再次进行了键接通的情况下能够立即接收初始化后的位置信息的gnss驱动控制装置、作业机械以及gnss驱动控制方法。
13.用于解决课题的手段
14.根据本公开的一方式,gnss驱动控制装置具备:接收针对gnss控制器的电源断开信号的电源信号接收部;以及关机处理部,在从接收电源断开信号起经过了规定时间之后,进行所述gnss控制器的关机处理。
15.发明效果
16.根据上述方式,在暂时的作业机械的键断开之后再次进行了键接通的情况下,能够接收立即初始化后的位置信息。
附图说明
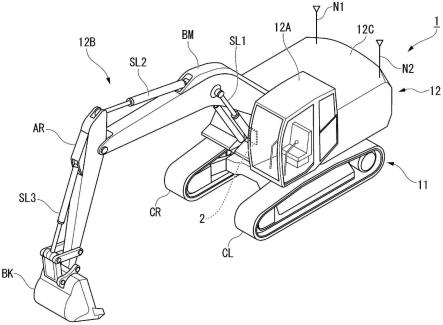
17.图1是表示第一实施方式的作业机械的整体构成的图。
18.图2是表示第一实施方式的作业机械的驾驶室的构成的图。
19.图3是用于说明第一实施方式的与电源相关的信号的流向的图。
20.图4是用于说明第一实施方式的与电源相关的信号的流向的图,并且是用于更详细地说明图3中所示的一部分构成的图。
21.图5是表示第一实施方式的gnss驱动控制装置的功能构成的图。
22.图6是表示第一实施方式的gnss驱动控制装置的处理流程的图。
23.图7是用于说明第一实施方式的第一变形例的与电源相关的信号的流向的图。
24.图8是用于说明第一实施方式的第二变形例的与电源相关的信号的流向的图。
具体实施方式
25.<第一实施方式>
26.以下,一边参照图1至图6,一边详细地说明第一实施方式的gnss驱动控制装置以及具备其的作业机械。
27.(作业机械的构造)
28.图1是表示第一实施方式的作业机械的构造的图。
29.作为液压挖掘机的作业机械1在作业现场等挖掘砂土等,并进行地面平整。
30.如图1所示,作为液压挖掘机的作业机械1具有用于行驶的下部行驶体11与设置于下部行驶体11的上部且能够绕铅垂方向的轴线回转的上部回转体12而成。另外,在上部回转体12设有驾驶室12a、工作装置12b以及两个gnss天线n1、n2。
31.下部行驶体11具有左侧履带cl与右侧履带cr。作业机械1通过左侧履带cl以及右侧履带cr的旋转前进、回转、后退。
32.驾驶室12a是作业机械1的操作人员搭乘且进行操作、操纵的场所。驾驶室12a例如设置于上部回转体12的前端部左侧部分。
33.工作装置12b包括动臂bm、斗杆ar以及铲斗bk。动臂bm安装于上部回转体12的前端部。另外,在动臂bm安装斗杆ar。另外,在斗杆ar安装铲斗bk。另外,在上部回转体12与动臂bm之间安装动臂缸sl1。通过驱动动臂缸sl1,能够使动臂bm相对于上部回转体12动作。在动臂bm与斗杆ar之间安装斗杆缸sl2。通过驱动斗杆缸sl2,能够使斗杆ar相对于动臂bm动作。在斗杆ar与铲斗bk之间安装铲斗缸sl3。通过驱动铲斗缸sl3,能够使铲斗bk相对于斗杆ar动作。
34.作为液压挖掘机的作业机械1所具备的上述的上部回转体12、动臂bm、斗杆ar以及铲斗bk是作业机械1的可动部的一个方式。
35.另外,说明了本实施方式的作业机械1具备上述构成,但在其他实施方式中,作业机械1也可以不一定具备上述构成的全部。
36.(驾驶室的构成)
37.图2是表示第一实施方式的作业机械的驾驶室的构成的图。
38.如图2所示,在驾驶室12a设有操作杆l1、l2、脚踏板f1、f2、及行驶杆r1、r2。
39.操作杆l1以及操作杆l2配置于驾驶室12a内的座椅st的左右。另外,脚踏板f1以及脚踏板f2配置于驾驶室12a内、座椅st的前方、地面。
40.朝向驾驶室前方配置于左侧的操作杆l1是用于进行上部回转体12的回转动作以及斗杆ar的挖掘/倾卸动作的操作机构。另外,朝向驾驶室前方配置于右侧的操作杆l2是用于进行铲斗bk的挖掘/倾卸动作以及动臂bm的上升/下降动作的操作机构。
41.另外,行驶杆r1、r2是用于进行下部行驶体11的动作控制、即作业机械1的行驶控制的操作机构。朝向驾驶室前方配置于左侧的行驶杆r1与下部行驶体11的左侧履带cl的旋转驱动对应。朝向驾驶室前方配置于右侧的行驶杆r2与下部行驶体11的右侧履带cr的旋转驱动对应。另外,脚踏板f1、f2分别与行驶杆r1、r2连动,也可以通过脚踏板f1、f2进行行驶控制。
42.在座椅st的右侧设有车身钥匙k。操作人员通过车身钥匙k进行键接通操作以及键断开操作。
43.(与电源相关的信号的流向)
44.图3、图4是用于说明第一实施方式的与电源相关的信号的流向的图。图4是用于更详细地说明图3中所示的一部分构成的图。
45.如图3所示,作业机械1具备gnss控制器4、电源5、多监视器6、泵控制器7以及发动机控制器8。另外,在本实施方式中,在gnss控制器4的内部内置有gnss驱动控制装置2。
46.gnss控制器4基于由gnss天线n1、n2接收到的卫星信号,取得该天线n1、n2各自的全局坐标系中的绝对位置。gnss控制器4基于该两个天线n1、n2的绝对位置取得表示作业机械1的全局坐标系中的绝对位置的位置信息。例如gnss控制器4计算两个天线n1、n2的绝对位置的中间位置作为作业机械1的绝对位置。
47.另外,gnss控制器4基于两个gnss天线n1、n2的相对的位置关系,计算作业机械1的全局坐标系中的方位。例如gnss控制器4计算将两个gnss天线n1、n2的绝对位置连结的直线,基于该计算出的直线与预先确定的基准方位所成的角度,计算作业机械1的方位。
48.gnss控制器4将表示作业机械1的绝对位置的位置信息以及表示作业机械1的方位的方位信息向未图示的通信终端发送。该通信终端除了由gnss控制器4取得的位置信息、方位信息之外,还将从作业机械1收集的运行时间等信息向服务器发送。发送到服务器的这些信息使用于作业机械1的监视、管理、分析。另外,在其他实施方式中,也可以是gnss控制器4具有上述通信终端的功能的方式。
49.另外,gnss控制器4计算的位置信息、方位信息也可以向未图示的车身控制器发送。在该情况下,车身控制器基于该位置信息、方位信息进行介入控制。介入控制例如是铲尖前端越接近目标设计面久越使工作装置的移动速度减少等控制。另外,也可以进行其他车身的控制。另外,在其他实施方式中,也可以不进行作业机械1的车身的控制。
50.另外,gnss控制器4也可以发送位置信息、方位信息作为与来自通信终端、车身控制器等其他控制器的请求信号相应的响应。另外,也可以与响应无关地在每次取得表示作业机械1的绝对位置的位置信息以及表示作业机械1的方位的方位信息时向通信终端、车身控制器等其他控制器发送位置信息、方位信息。
51.gnss天线n1、n2被从gnss控制器4供给规定的动作电压。
52.搭载于gnss控制器4内部的gnss驱动控制装置2控制gnss控制器4的电源接通以及电源断开。关于gnss驱动控制装置2的具体的动作,之后进行叙述。
53.另外,gnss控制器4由cpu、主存储装置、辅助存储装置、输入输出接口等硬件构成。
54.多监视器6是对表示燃料等级、冷却水温度等状态的各种仪表类进行显示的监视器。
55.泵控制器7控制液压泵的输出。液压泵与发动机机械连结,通过该发动机的驱动而驱动,向动臂缸sl1等液压设备排出工作油。
56.发动机控制器8调整向发动机的燃料供给量,控制发动机的输出。
57.电源5是作为作业机械1的永久电源搭载的电池。电源5通过电源线vb以及接地线gnd向上述的各控制器供给例如24v的直流电源电压。
58.如图3所示,构成为若车身钥匙k被键接通,则从该车身钥匙k向gnss控制器4、多监视器6、泵控制器7以及发动机控制器8分别发送电源接通信号acc。若接收到该电源接通信号acc,则各控制器基于从电源5供给的直流电源电压开始起动。
59.图4示出了gnss控制器4的内部构成的一部分。如图4所示,gnss控制器4在内部具有开关sw4、电源电路ps4、控制部c4以及或门g4。
60.开关sw4是根据电源接通信号acc以及电源断开信号acc的输入而接通/断开的开关。开关sw4接通而使得电源电路ps4连接于电源线vb,该电源电路ps4被供给来自电源5的直流电源电压。
61.电源电路ps4将来自电源5的直流电源电压转换为适当的电源电压,向控制部c4输入。由此,控制部c4起动。
62.控制部c4例如是进行gnss控制器4的主要处理的cpu等。控制部c4在起动中,将自身电源接通信号sig_c4接通,输入到或门g4。如此,即使伴随着操作人员的键断开操作而突然发送了电源断开信号acc,也能够防止立即切断向控制部c4的电源供给。发挥这种作用的或门g4是所谓的自保持电路,为了在将控制部c4断开电源时确保用于将存储器的数据向非易失性存储器传送的时间而使用。
63.另外,或门g4、开关sw4由晶体管等分立部件实现。
64.另外,多监视器6、泵控制器7以及发动机控制器8具有与gnss控制器4相同的电源电路、自保持电路等。
65.(键接通操作后的流程)
66.一边参照图3、图4,一边详细地说明键接通操作后的流程。
67.首先,在作业机械1停止的状态下,若由操作人员将车身钥匙k进行键接通,则作业机械1的发动机工作。与此同时,从车身钥匙k朝向gnss控制器4、多监视器6、泵控制器7以及发动机控制器8同时发送电源接通信号acc。
68.由gnss控制器4内部的或门g4接收输入到gnss控制器4的电源接通信号acc。由此,通过或门g4接通开关sw4,gnss控制器4的控制部c4基于从电源5供给的直流电源电压而起动。
69.gnss控制器4若完成起动则进行初始化。之后,gnss控制器4每时每刻接收卫星信号,并将基于该卫星信号计算出的位置信息以及方位信息向未图示的通信终端发送。
70.(键断开操作后的流程)
71.接下来,详细地说明键断开操作后的流程。
72.在作业机械1起动的状态下,若由操作人员将车身钥匙k键断开,则作业机械1的发动机停止。与此同时,从车身钥匙k向gnss控制器4发送电源断开信号acc。
73.由gnss控制器4内部的控制部c4接收输入到gnss控制器4的电源断开信号acc。控制部c4若从车身钥匙k接收电源断开信号acc,则从该电源断开信号acc的接收时刻经过了规定时间之后,进行gnss控制器4的关机处理。之后详细叙述该处理。
74.(gnss驱动控制装置的功能构成)
75.图5是表示第一实施方式的gnss驱动控制装置的功能构成的图。
76.如图5所示,gnss驱动控制装置2具备cpu20、存储器21、通信接口22、储存器23。另外,cpu20是fpga、gpu等,只要类似于它们则可以是任意方式。
77.另外,在本实施方式中,gnss驱动控制装置2可以由与构成gnss控制器4的硬件独立的硬件构成,也可以由共同的硬件构成。例如cpu20、存储器21、通信接口22、储存器23也可以由构成gnss控制器4的cpu、主存储装置、辅助存储装置、输入输出接口等构成。另外,也可以将cpu20、存储器21、通信接口22、储存器23中的任一个或者所有用与构成gnss控制器4的cpu、主存储装置、辅助存储装置、输入输出接口等独立的硬件构成。
78.cpu20是负责gnss驱动控制装置2整个动作的控制的处理器。之后对cpu20所具有的各种功能进行叙述。
79.存储器21是所谓的主存储装置。在存储器21中,展开cpu20基于规定的程序动作所需的命令以及数据。
80.通信接口22是用于与外部交换电源接通信号以及电源断开信号的输入输出接口。
81.储存器23是所谓的辅助存储装置,例如是hdd(hard disk drive)、ssd(solid state drive)等。
82.接下来,详细地说明cpu20所具有的功能。cpu20基于规定的程序动作,从而发挥作为电源信号接收部201、关机处理部202以及设定变更部203的功能。
83.另外,上述规定的程序也可以用于实现使gnss驱动控制装置2发挥的功能的一部分。例如程序也可以通过与已存储于储存器23的其他程序的组合、或者与安装于其他装置的其他程序的组合来发挥功能。另外,在其他实施方式中,gnss驱动控制装置2也可以在上述构成的基础上或者取代上述构成而具备pld(programmable logic device)等定制lsi(large scale integrated circuit)。作为pld的例子,可列举pal(programmable array logic)、gal(generic array logic)、cpld(complex programmable logic device)、fpga(field programmable gate array)。在该情况下,由处理器实现的功能的一部分或者全部也可以由该集成电路实现。
84.电源信号接收部201从车身钥匙k接收电源接通信号acc以及电源断开信号acc。
85.关机处理部202在从接收电源断开信号acc起经过了规定时间之后进行gnss控制器4的关机处理。例如关机处理部202也可以在接收到从车身钥匙k接收到的电源断开信号acc起经过了规定时间之后,通过断开gnss控制器4的或门g4的输入而断开gnss控制器4的电源。另外,也可以在从该接收时刻起经过了规定时间之后断开或门g4的输出、电源电路ps4的输出,从而断开gnss控制器4的电源。
86.设定变更部203基于操作人员的操作变更上述规定时间。
87.另外,cpu20内置有具有计时器功能的电源断开计时器tm。该电源断开计时器tm可以是按照程序进行动作的cpu20发挥其功能的软件的方式,也可以是由逻辑电路等构成的硬件的方式。另外,在其他实施方式中,电源断开计时器tm也可以是设置于cpu20的外部的方式。
88.(gnss驱动控制装置的处理流程)
89.图6是表示第一实施方式的gnss驱动控制装置的处理流程的图。
90.图6所示的处理流程在作业机械1的各控制器正在执行起动中的通常处理的阶段开始。
91.gnss驱动控制装置2的电源信号接收部201判定是否从车身钥匙k接收到电源断开信号acc(步骤s01)。
92.在未从车身钥匙k接收到电源断开信号acc的情况下(步骤s01;no),电源信号接收部201不进行特别的处理而是返回到处理流程的最初。
93.在从车身钥匙k接收到电源断开信号acc的情况下(步骤s01;yes),gnss驱动控制装置2的关机处理部202判定从接收到电源断开信号acc起规定时间后将gnss控制器4断开电源的设定(以下,也记载为规定时间后电源断开设定。)是否有效(步骤s02)。
94.在规定时间后电源断开设定无效的情况下(步骤s02;no),关机处理部202为了立即将gnss控制器4断开电源而移至步骤s07的关机处理。
95.在规定时间后电源断开设定有效的情况下(步骤s02;yes),关机处理部202为了在经过规定时间后将gnss控制器4断开电源,开始电源断开计时器tm的计数(步骤s03)。
96.关机处理部202对电源断开计时器tm进行向上计数(步骤s04)。
97.电源信号接收部201判定是否从车身钥匙k接收到电源接通信号acc(步骤s05)。
98.在未从车身钥匙k接收到电源接通信号acc的情况下(步骤s05;no),接下来,关机处理部202判定电源断开计时器tm的计数是否到达了规定时间(步骤s06)。
99.在电源断开计时器tm的计数未到达规定时间的情况下(步骤s06;no),关机处理部202返回步骤s04,继续进行电源断开计时器tm的向上计数。
100.在电源断开计时器tm的计数到达规定时间的情况下(步骤s06;yes),关机处理部202为了将gnss控制器4断开电源而执行关机处理(步骤s07)。由此,gnss控制器4断开电源。
101.另一方面,在电源断开计时器tm的向上计数中,在从车身钥匙k接收到电源接通信号acc的情况下(步骤s05;yes),关机处理部202将电源断开计时器的计数复位(步骤s08),返回步骤s01的处理。即,能够不执行关机处理地禁止关机处理。在该情况下,从操作人员进行键断开操作到再次进行键接通操作为止的期间,gnss控制器4维持电源接通的状态,因此不进行初始化也可以。因而,可以立即从gnss控制器4接收初始化后的位置信息等。
102.另外,在上述的处理流程中,虽然说明了以使电源断开计时器tm向上计数的方式进行规定时间的测量的方式,但在其他实施方式中并不限定于该方式。在上述规定时间的测量中,也可以是使电源断开计时器tm向下计数的方式,除此之外,也可以应用公知的时间测量的方式。
103.另外,使用图6说明的各处理流程中的步骤s03~s04、步骤s8并非必须的构成,在其他实施方式中也可以不具备这样的步骤。
104.(设定变更部的功能)
105.gnss驱动控制装置2的设定变更部203能够从例如“立即”、“1小时以后”、“5小时以后”这3个项目选择从键断开操作完成到电源断开为止的规定时间。在受理了“1小时以后”、“5小时以后”中的某一个的输入的情况下,设定变更部203将使用于图6的步骤s06的判定的规定时间分别设定为1小时或5小时。在受理了“立即”的输入的情况下,设定变更部203使规定时间后电源断开设定无效。由此,在图6的步骤s02中成为no的判定,在受理键断开操作之后,移至关机处理。另外,在电源断开计时器tm的向上计数中设定了规定时间的情况下,也可以将电源断开计时器tm的计数时间更新为所设定的规定时间。
106.规定时间的设定例如也可以是能够通过设于gnss控制器4的框体的硬开关来选择,也可以是能够通过经由多监视器6、或者未图示的其他监视器、平板等终端装置的软件处理来选择。
107.另外,由设定变更部203进行的上述规定时间的变更处理也可以有不基于操作人员的操作、而是通过软件控制等自动地进行的情况。
108.另外,从键断开操作完成到gnss控制器4实际上断开电源为止的规定时间也可以与上述的设定值无关而被任意地决定。另外,该规定时间优选的是设定为,在连接于与电源相关的信号的多监视器6、泵控制器7等所有组件之中,gnss控制器4维持电源接通直到最后。另外,与电源相关的信号例如指的是电源线vb、电源接通信号acc、电源断开信号acc。如此,gnss控制器4能够取得从键断开到实际上电源断开为止的位置信息、作业机械1的方位信息。另外,也可以设定为至少相比于发动机控制器8、泵控制器7维持电源接通。如此,能够在键断开操作之后立刻使液压泵的输出、发动机的输出停止,并且实际取得gnss控制器4断开电源为止的位置信息、作业机械1的方位信息。
109.(作用,效果)
110.如以上那样,第一实施方式的gnss驱动控制装置2具备接收针对gnss控制器4的电源断开信号的电源信号接收部201、及在从接收电源断开信号起经过了规定时间之后进行gnss控制器4的关机处理的关机处理部202。根据这种构成,在暂时的作业机械的键断开之后,在规定时间内再次进行了键接通的情况下,gnss控制器4的电源被维持为接通状态。由此,gnss控制器4能够不进行初始化地提供位置信息等。
111.(其他实施方式)
112.以上,详细说明了第一实施方式的gnss驱动控制装置,但gnss驱动控制装置的具体的方式并不限定于上述,在不脱离主旨的范围内可以施加各种设计变更等。
113.(第一变形例)
114.图7是用于说明第一实施方式的第一变形例的与电源相关的信号的流向的图。
115.如图7所示,第一变形例的gnss驱动控制装置2在与gnss控制器4分开地独立设置这一点与第一实施方式不同。
116.本变形例的gnss驱动控制装置2从车身钥匙k直接接收电源断开信号acc。于是,gnss驱动控制装置2在经过规定时间后将电源断开信号sig朝向gnss控制器4发送。gnss控制器4以接收到该电源断开信号sig为契机关机。例如,以接收到电源断开信号sig为契机,断开或门g4的输出、电源电路ps4的输出。gnss驱动控制装置2朝向gnss控制器4输出电源断开信号sig的处理也包含在关机处理中。
117.如此,gnss驱动控制装置2也可以不属于gnss控制器或者其他控制器,而是独立设置的方式。
118.(第二变形例)
119.图8是用于说明第一实施方式的第二变形例的与电源相关的信号的流向的图。
120.如图8所示,第二变形例的gnss驱动控制装置2在设于与gnss控制器4不同的其他控制器即发动机控制器8的内部这一点与第一实施方式不同。
121.本变形例的gnss驱动控制装置2接收从车身钥匙k朝向发动机控制器8输出的电源断开信号acc。于是,gnss驱动控制装置2在经过规定时间后将电源断开信号sig朝向gnss控制器4发送。gnss控制器4以接收到该电源断开信号sig为契机关机。例如以接收到电源断开信号sig为契机,断开或门g4的输出、电源电路ps4的输出。gnss驱动控制装置2朝向gnss控制器4输出电源断开信号sig的处理也包含在关机处理中。
122.如此,gnss驱动控制装置2也可以是设置于与gnss控制器不同的其他控制器的内部的方式。另外,gnss驱动控制装置2设于发动机控制器8的内部是一个例子,也可以设于多监视器6、泵控制器7等其他控制器的内部。
123.上述的gnss驱动控制装置2的各种处理的过程以程序的形式存储于计算机能够读取的记录介质,由计算机读出并执行该程序来进行上述各种处理。另外,计算机能够读取的记录介质是指磁盘、光磁盘、cd-rom、dvd-rom、半导体存储器等。另外,也可以通过通信线路将该计算机程序发布到计算机,并由接收到该发布的计算机执行该程序。
124.上述程序也可以用于实现上述的功能的一部分。而且,也可以是能够与已记录于计算机系统的程序的组合来实现上述的功能的所谓的差分文件或者差分程序等。
125.以上,虽然说明了本公开的几个实施方式,但这些实施方式是作为例子而提出的,并不意图限定公开的范围。这些实施方式能够以其他各种方式实施,在不脱离公开的主旨的范围内能够进行各种省略、替换、变更。这些实施方式、其变形包含在公开的范围、主旨内,同样包含在权利要求书所记载的公开与其等效的范围内。
126.在上述的实施方式中,将作业机械1作为液压挖掘机进行了说明,但在其他实施方式中,能够应用于自卸汽车、轮式装载机、推土机等各种作业机械。
127.另外,在上述的实施方式中,说明了1台gnss驱动控制装置2设置于作业机械1,但在其他实施方式中,也可以将gnss驱动控制装置2的一部分的构成配置于其他gnss驱动控制装置,通过由2台以上的gnss驱动控制装置构成的gnss驱动控制系统来实现。另外,上述的实施方式的gnss驱动控制装置2也是gnss驱动控制系统的一个例子。
128.另外,说明了上述的实施方式的gnss驱动控制装置2设置于作业机械1,但在其他实施方式中,也可以是gnss驱动控制装置2的一部分、或者所有构成设置于作业机械1的外部。
129.另外,在上述的实施方式中,说明了关机处理部202在经过了规定时间之后断开或门g4的输出、电源电路ps4的输出而将gnss控制器4断开电源,但在其他实施方式中,也可以通过将位于gnss控制器4的上游侧的电源、内部信号断开而将gnss控制器4断开电源。例如也可以通过将电源5等的输出断开来将gnss控制器4断开电源。
130.另外,在上述的实施方式中,说明了以电源断开信号sig的发送为契机将gnss控制器4断开电源,但在其他实施方式中,也可以不发送电源断开信号sig地将位于gnss控制器4
的上游侧的电源、内部信号断开来将gnss控制器4断开电源。例如也可以通过将电源5等的输出断开来将gnss控制器4断开电源。
131.另外,在上述的实施方式中,说明了gnss控制器4计算作业机械1的方位,但在其他实施方式中,gnss控制器4也可以不计算方位。
132.工业上的可利用性
133.根据上述公开,在暂时的作业机械的键断开之后再次进行了键接通的情况下,能够立即接收初始化后的位置信息。
134.附图标记说明
135.1作业机械,2gnss驱动控制装置,20cpu,201电源信号接收部,202关机处理部,203设定变更部,21存储器,22通信接口,23储存器,4gnss控制器,5电源,6多监视器,7泵控制器,8发动机控制器。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。