1.本发明涉及马达驱动装置以及马达驱动方法。
背景技术:
2.例如在彩色复印机等中使用的马达,严格要求降低旋转不均(wow flutter)。例如在彩色复印机中,若存在马达的旋转不均,则成为在印刷时产生颜色不均的原因。
3.针对上述那样的课题,例如,在下述专利文献1中公开了一种无刷马达的驱动控制装置:具备存储基于霍尔元件的特性的偏差而决定的超前角信息的存储单元,控制单元基于存储于存储单元的信息来控制无刷马达。
4.专利文献1:日本特开2012-85370号公报
5.通常,马达的旋转不均包含1旋转分量(旋转一次分量)和多个高次谐波分量。例如,在彩色复印机的情况下,旋转一次分量和旋转n次分量(n是由马达的极数/2决定的自然数)对颜色不均造成较大的影响。
6.1旋转分量即旋转一次分量(w1)是马达每旋转一周时产生的周期性的斑(不均),受马达的组装精度等的影响而产生。旋转n次分量(包含的高次谐波分量)是由马达的磁极数引起的分量,受霍尔元件等位置检测元件的安装精度、磁铁的磁化的影响而产生。
7.另外,近年来,旋转不均的1旋转分量、高次谐波分量被认为是使马达的旋转速度相对于目标旋转速度的稳定性降低的因素之一,为了实现马达的高精度的驱动,降低旋转不均也是重要的。
8.在上述专利文献1的技术中,由于使用基于霍尔元件的特性的偏差的超前角信息来控制无刷马达,因此即使能够降低基于霍尔元件的特性的偏差的旋转不均,也无法降低由于马达的组装精度等其他因素而产生的旋转不均。
技术实现要素:
9.本发明是为了解决上述课题而完成的,其目的在于降低马达的旋转不均。
10.本发明的代表性的实施方式所涉及的马达驱动装置的特征在于,具备:驱动信号生成电路,基于指示马达的转矩的转矩指令信号和根据上述马达的旋转而生成的信号,输出用于使上述马达驱动的驱动信号;和马达驱动电路,基于由上述驱动信号生成电路输出的上述驱动信号,驱动上述马达,上述驱动信号生成电路具有:判定部,判定上述马达的旋转是否稳定;旋转速度取得部,在上述判定部判定为上述马达的旋转稳定的情况下,取得上述马达的旋转速度的值;第一基本信号生成部,基于由上述旋转速度取得部取得到的上述旋转速度的值,生成与上述马达的理论上的旋转位置对应的第一基本信号;以及信号生成部,在上述判定部判定为上述马达的旋转稳定的情况下,基于上述第一基本信号和上述转矩指令信号,生成上述驱动信号。
附图说明
11.图1是表示本发明的实施方式所涉及的马达驱动装置的结构的图。
12.图2是表示驱动信号生成电路的内部结构的框图。
13.图3是表示马达的旋转速度的时间变化的一个例子的图。
14.图4是表示在驱动信号生成电路生成的信号的一个例子的图。
15.图5是用于对基于本实施方式所涉及的马达驱动装置的、马达的旋转速度变化时的马达的驱动方法进行说明的图。
16.图6是表示由本实施方式所涉及的马达驱动装置进行的处理的流程的流程图。
17.附图标记说明
[0018]1…
马达驱动装置;2
…
马达驱动电路;2a
…
逆变器电路;2b
…
预驱动电路;3
…
驱动信号生成电路;20
…
马达;25u、25v、25w
…
霍尔元件;26
…
旋转速度检测装置;30
…
信号生成部;31
…
转矩指令值取得部;32
…
判定部;33
…
旋转速度取得部;34
…
第一基本信号生成部;36
…
旋转位置检测部;37
…
第二基本信号生成部;38
…
选择器;39
…
正弦波驱动部;100
…
马达单元;hu、hv、hw
…
旋转位置检测信号(霍尔信号);sb1
…
第一基本信号;sb2
…
第二基本信号;sd
…
驱动信号;se
…
判定结果信号;sr
…
旋转速度检测信号;st
…
转矩指令信号。
具体实施方式
[0019]
1.实施方式的概要
[0020]
首先,对本技术中公开的发明的代表性的实施方式的概要进行说明。此外,在以下的说明中,作为一个例子,对与发明的构成要素对应的附图上的参照附图标记标注括号进行记载。
[0021]
〔1〕本发明的代表性的实施方式所涉及的马达驱动装置(1)的特征在于,具备:驱动信号生成电路(3),基于指示马达(20)的转矩的转矩指令信号(st)和根据上述马达的旋转而生成的信号(hu、hv、hw、sr),输出用于使上述马达驱动的驱动信号(sd);和马达驱动电路(2),基于由上述驱动信号生成电路输出的上述驱动信号(sd),驱动上述马达,上述驱动信号生成电路(3)具有:判定部(32),判定上述马达的旋转是否稳定;旋转速度取得部(33),在上述判定部判定为上述马达的旋转稳定的情况下,取得上述马达的旋转速度的值;第一基本信号生成部(34),基于由上述旋转速度取得部取得的上述旋转速度的值,生成与上述马达的理论上的旋转位置对应的第一基本信号(sb1);以及信号生成部(30(31、38、39)),在上述判定部判定为上述马达的旋转稳定的情况下,基于上述第一基本信号和上述转矩指令信号,生成上述驱动信号。
[0022]
〔2〕在上述〔1〕所记载的马达驱动装置的基础上,也可以构成为,上述旋转速度取得部(33)在上述判定部(32)检测出从上述马达的旋转不稳定的状态变成了上述马达的旋转稳定的状态的情况下,取得上述马达的旋转速度的值。
[0023]
〔3〕在上述〔1〕或〔2〕所记载的马达驱动装置的基础上,也可以构成为,上述判定部(32)在上述马达(20)的旋转速度的变动在规定期间内处于规定的范围(r)内的情况下,判定为上述马达的旋转稳定。
[0024]
〔4〕在上述〔1〕~〔3〕中任一项所记载的马达驱动装置的基础上,也可以构成为,上述驱动信号生成电路(3)还具有第二基本信号生成部(37),该第二基本信号生成部(37)基
于根据上述马达的旋转而生成的旋转位置检测信号(hu、hv、hw),生成与上述马达的旋转位置对应的第二基本信号(sb2),上述信号生成部(30(31、38、39))在上述判定部判定为上述马达的旋转不稳定的情况下,基于上述第二基本信号和上述转矩指令信号(st),生成上述驱动信号(sd)。
[0025]
〔5〕在上述〔4〕所记载的马达驱动装置的基础上,也可以构成为,上述信号生成部(30(31、38、39))包含:选择器(38),在上述判定部判定为上述马达的旋转稳定的情况下,选择上述第一基本信号(sb1)而输出,在上述判定部判定为上述马达的旋转不稳定的情况下,选择上述第二基本信号(sb2)而输出;和正弦波驱动部(39),基于由上述选择器输出的上述第一基本信号或上述第二基本信号和上述转矩指令信号(st),生成用于对上述马达进行正弦波驱动的信号,并作为上述驱动信号(sd)而输出。
[0026]
〔6〕本发明的代表性的实施方式所涉及的马达驱动方法可以包含:第一步骤(s13),判定马达(20)的旋转是否稳定;第二步骤(s14),在上述第一步骤中判定为上述马达的旋转稳定的情况下,取得上述马达的旋转速度的值;第三步骤(s15),基于在上述第二步骤中取得到的上述旋转速度的值,生成与上述马达的理论上的旋转位置对应的第一基本信号(sb1);以及第四步骤(s15),在上述第二步骤中判定为上述马达的旋转稳定的情况下,基于在上述第三步骤中生成的上述第一基本信号和指示上述马达的转矩的转矩指令信号(st),生成用于使上述马达驱动的驱动信号。
[0027]
2.实施方式的具体例
[0028]
以下,参照附图对本发明的实施方式的具体例进行说明。此外,在以下的说明中,对各实施方式中共用的构成要素标注相同的参照附图标记并省略重复的说明。
[0029]
《实施方式》
[0030]
图1是表示本发明的实施方式所涉及的马达驱动装置1的结构的图。
[0031]
图1所示的马达单元100具备马达20和进行马达20的驱动的马达驱动装置1。马达单元100例如搭载于复印机(例如彩色复印机)等。
[0032]
马达20例如是无刷马达。在本实施方式中,马达20是三相的无刷马达。
[0033]
马达驱动装置1构成为例如通过正弦波驱动而使马达20驱动。马达驱动装置1通过使正弦波状的驱动电流周期性地流过马达20的电枢线圈lu、lv、lw,来使马达20旋转。
[0034]
马达驱动装置1具有马达驱动电路2和驱动信号生成电路3。此外,图1所示的马达驱动装置1的构成要素是整体的一部分,马达驱动装置1也可以除图1所示的构成要素之外,还具有其他的构成要素。
[0035]
马达驱动电路2基于后述的从驱动信号生成电路3输出的驱动信号sd,向马达20输出驱动信号来驱动马达20。马达驱动电路2具有逆变器电路2a及预驱动电路2b。
[0036]
逆变器电路2a基于从预驱动电路2b输出的输出信号,向马达20输出驱动信号,并对马达20所具备的电枢线圈lu、lv、lw进行通电。逆变器电路2a例如通过对电枢线圈lu、lv、lw的各相(u相、v相、w相)分别配置设于直流电源vcc的两端的两个开关元件的串联电路对而构成。在两个开关元件的各对中,在开关元件彼此的连接点连接马达20的各相的端子。
[0037]
预驱动电路2b基于来自驱动信号生成电路3的驱动信号sd,生成用于驱动逆变器电路2a的输出信号,并输出给逆变器电路2a。
[0038]
驱动信号sd例如是pwm(pulse width modulation:脉冲宽度调制)信号。具体而
言,驱动信号sd包含与逆变器电路2a的各开关元件对应的6种pwm信号。
[0039]
预驱动电路2b例如基于驱动信号sd,生成使逆变器电路2a的各开关元件驱动的6种驱动信号vuu、vul、vvu、vvl、vwu、vwl并输出。通过将这些驱动信号输入到逆变器电路2a,构成逆变器电路2a的开关元件进行接通、断开动作。由此,对马达20的各相供给电力。
[0040]
驱动信号生成电路3例如通过开环方式的马达驱动方式来驱动马达20。
[0041]
这里,开环方式是指不进行使实际旋转速度与目标旋转速度的误差变小的控制,而是基于所输入的转矩指令信号和旋转位置检测信号生成驱动信号,并基于所生成的驱动信号进行马达的驱动的方式。
[0042]
驱动信号生成电路3例如代替被输入指示作为马达20的旋转速度的目标值的目标旋转速度的目标旋转速度信号而是被输入指定马达20的转矩的转矩指令信号st,并基于所输入的转矩指令信号st来驱动马达20。
[0043]
转矩指令信号st例如是指示与作为目标的转矩的值对应的占空比的信号,例如是pwm信号。
[0044]
在本实施方式中,驱动信号生成电路3例如是具有cpu等处理器、ram、rom等各种存储装置、计数器(计时器)、a/d转换电路、d/a转换电路、时钟发生电路、以及输入输出i/f电路等周边电路经由总线等相互连接起来的结构的程序处理装置(例如,微控制器)。
[0045]
此外,马达驱动装置1可以是将驱动信号生成电路3和马达驱动电路2作为一个集成电路装置(ic)而被封装化的结构,也可以是将驱动信号生成电路3和马达驱动电路2作为各自独立的集成电路装置而分别被封装化的结构。
[0046]
驱动信号生成电路3被输入从安装于马达20的位置检测装置输出的与马达20的旋转对应的旋转位置检测信号。旋转位置检测装置例如是霍尔(hall)元件。例如,在马达20设置有与马达20的各相(u相、v相、w相)分别对应的三个霍尔元件25u、25v、25w作为旋转位置检测装置。
[0047]
三个霍尔元件25u、25v、25w例如相互以大致等间隔(例如,相邻的霍尔元件以120度的间隔)配置于马达20的转子(旋转体)的周围。在以下的说明中,在统称霍尔元件25u、25v、25w的情况下,往往记为“霍尔元件25”。
[0048]
霍尔元件25u、25v、25w分别检测转子的磁极,并输出电压根据转子的旋转而变化的霍尔信号hu、hv、hw。霍尔信号hu、hv、hw分别作为旋转位置检测信号被输入到驱动信号生成电路3。
[0049]
此外,也可以构成为在驱动信号生成电路3,代替这样的霍尔信号hu、hv、hw,而被输入与马达20的转子的旋转位置对应的其他信号作为旋转位置检测信号。例如,也可以设置编码器、旋转变压器、马达电流检测电路等,输入其检测信号。
[0050]
在本实施方式中,作为一个例子,假设霍尔信号hu、hv、hw作为旋转位置检测信号被输入到驱动信号生成电路3,在以下的说明中,也将“霍尔信号hu、hv、hw”称为“旋转位置检测信号hu、hv、hw”。
[0051]
另外,驱动信号生成电路3被输入包含马达20(转子)的旋转速度的信息的旋转速度检测信号sr。旋转速度检测信号sr例如是具有与转子的旋转速度(转速)对应的周期(频率)的周期信号(fg(frequency generator:频率发生器)信号)。
[0052]
在本实施方式中,作为旋转速度检测信号sr的fg信号由旋转速度检测装置26生
成。旋转速度检测装置26例如是配置在马达基板上的fg图案。作为旋转速度检测装置26的fg图案使与马达20的旋转速度对应的周期信号(fg信号)产生。该fg信号作为旋转速度检测信号sr被输入到驱动信号生成电路3。
[0053]
这里,旋转速度检测信号sr只要是包含表示马达20的旋转速度的信息的信号即可,不限定于fg信号。例如,在本实施方式中,对使用作为旋转速度检测装置26的fg图案来生成旋转速度检测信号sr的情况进行了说明,但并不限于此,也可以使用编码器、旋转变压器等其他旋转速度检测装置来生成旋转速度检测信号sr,也可以是驱动信号生成电路3自身基于霍尔信号hu、hv、hw来生成旋转速度检测信号sr。
[0054]
另外,在驱动信号生成电路3进行不使用霍尔元件25u、25v、25w的无传感器的驱动控制的情况下,驱动信号生成电路3也可以通过执行公知的无传感器驱动控制的运算,来计算马达20的旋转速度而生成旋转速度检测信号sr(旋转速度信息)。
[0055]
如上所述,驱动信号生成电路3被输入转矩指令信号st来代替被输入目标旋转速度信号。例如,从设置于马达驱动装置1的外部的上位装置(复印机的控制单元等)输出的转矩指令信号st被输入到驱动信号生成电路3。
[0056]
驱动信号生成电路3基于转矩指令信号st和根据马达20的旋转而生成的信号(hu、hv、hw、sr),生成用于使马达20驱动的驱动信号sd并输出。详细内容在后面叙述,驱动信号生成电路3在马达20的旋转稳定的情况下,取得(测量)马达20的旋转速度,基于取得的稳定旋转时的旋转速度的值而生成与马达20(转子)的理论上的旋转位置对应的基本信号,基于所生成的基本信号和转矩指令信号st生成驱动信号sd。
[0057]
以下,对驱动信号生成电路3的内部结构进行说明。
[0058]
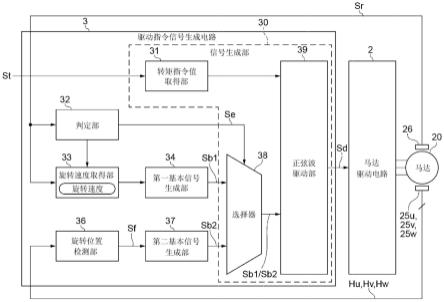
图2是表示驱动信号生成电路3的内部结构的框图。
[0059]
如图2所示,驱动信号生成电路3包含判定部32、旋转速度取得部33、第一基本信号生成部34、旋转位置检测部36及第二基本信号生成部37和作为信号生成部30的转矩指令值取得部31、选择器38及正弦波驱动部39作为用于实现马达的正弦波驱动的功能模块。这些功能模块通过上述的mcu内的cpu执行各种运算,并且控制输入输出i/f电路等的周边电路来实现。
[0060]
此外,在图2中,各电路间的信号、信息等的收发仅示出与驱动信号sd的生成相关的说明作为一个例子。
[0061]
转矩指令值取得部31例如是根据从上位装置输入到驱动信号生成电路3的转矩指令信号st取得转矩的指令值(目标值)的功能部。例如,在转矩指令信号st是以占空比表示转矩的指令值的pwm信号的情况下,转矩指令值取得部31对作为转矩指令信号st的pwm信号的占空比进行解析,并将解析出的值作为转矩指令值提供给正弦波驱动部39。
[0062]
判定部32是判定马达20的旋转是否稳定的功能部。判定部32基于旋转速度检测信号sr,监视马达20的旋转速度,判定旋转速度是否满足稳定旋转判定条件,由此将表示马达20的旋转是否稳定的判定结果信号se输出。
[0063]
图3是表示马达20的旋转速度的时间变化的一个例子的图。
[0064]
在图3中,横轴表示时间,纵轴表示马达20的旋转速度。另外,图3中的参照附图标记300是表示在时刻t0从上位装置输入转矩指令信号st,马达驱动装置1开始马达20的驱动的情况下的、马达20的旋转速度的时间变化的图表。
[0065]
判定部32进行判定马达20的旋转是否稳定的判定处理。例如,判定部32定期地(在规定的期间t1)逐次执行判定处理。规定的期间t1例如是fg图案的1个周期(旋转速度检测信号sr的1个周期)。例如,判定部32针对fg图案的每一周期的输出(旋转速度检测信号sr的每一周期)执行判定处理。
[0066]
判定部32在判定处理中,基于旋转速度检测信号sr,逐次测量马达20的旋转速度。例如,判定部32通过测量旋转速度检测信号sr的周期(频率)来测量马达20的旋转速度。
[0067]
接下来,判定部32判定旋转速度的变动是否在规定的范围r(以下,也称为“允许变动范围r”)内。具体而言,判定部32判定将测量出的马达20的旋转速度的值与上次测量时的马达20的旋转速度进行了比较时的旋转速度的变动(例如,变动率或变动量)是否在允许变动范围r内。例如,判定部32判定旋转速度的测量值的变动率是否在允许变动范围r内(例如,
±
3%以内)。
[0068]
而且,判定部32在规定的期间t1内判定的多个旋转速度的测量值的变动率在规定的次数以上且在允许变动范围r内的情况下,将表示马达20的旋转稳定的状态(以下,也称为“稳定旋转状态”)的判定结果信号se输出,在多个旋转速度的测量值的变动率在允许变动范围r内没有持续规定的次数以上的情况下,将表示马达20的旋转不稳定的状态(以下,也称为“不稳定旋转状态”)的判定结果信号se输出。
[0069]
此外,由判定部32进行的判定只要能够检测出旋转速度的测量值的变动率在允许变动范围r内持续变动即可,具体的判定方法不限定于上述内容。例如,也可以将规定的期间t1设为旋转速度检测信号sr的多个周期、一定的期间,判定部32计算规定的期间t1中的旋转速度的平均值,在比规定的期间t1长的第二规定的期间t2中上述平均值在允许变动范围r内的情况下,判定为稳定旋转状态。
[0070]
在图3所示的例子的情况下,从时刻t0到时刻t1,马达20的旋转速度持续上升,旋转速度的变动率超出允许变动范围r(例如,
±
3%)。此时,判定部32将表示马达20的旋转速度不稳定的状态(不稳定旋转状态)的判定结果信号se输出。
[0071]
然后,马达20的旋转速度的上升停止,接近一定的值,由此旋转速度的变动率落入允许变动范围r内。例如,在时刻t2,在旋转速度的变动率在允许变动范围r内的状态持续了规定的期间t2的情况下,判定部32将表示马达20处于稳定旋转状态的判定结果信号se输出。
[0072]
旋转速度取得部33是在判定部32判定为马达20处于稳定旋转状态的情况下,取得马达20的旋转速度的值的功能部。具体而言,旋转速度取得部33根据从判定部32输出了表示马达20处于稳定旋转状态的判定结果信号se,基于旋转速度检测信号sr来测量马达20的旋转速度,取得其测量值。例如,在图3所示的例子中,在时刻t2从判定部32输出了表示马达20处于稳定旋转状态的判定结果信号se时,旋转速度取得部33基于旋转速度检测信号sr,测量马达20的旋转速度,取得该测量值例如作为一定值。
[0073]
这里,优选旋转速度取得部33不是在马达20处于稳定旋转状态的情况下,定期地取得旋转速度的值,而是在判定部32检测出从马达20的旋转不稳定的状态(不稳定旋转状态)变成了马达20的旋转稳定的状态(稳定旋转状态)的情况下,取得旋转速度的值。例如,优选不是在由判定部32进行的各判定处理中,每次判定为马达20处于稳定旋转状态时取得马达20的旋转速度的值,而是仅在马达20从不稳定旋转状态过渡到稳定旋转状态时,取得
马达20的旋转速度的值作为一定值。
[0074]
此外,旋转速度取得部33取得的旋转速度的值例如可以是在规定的期间t2内取得的旋转速度的测量值之一,也可以是在规定的期间t2内取得的多个旋转速度的测量值的平均值。即,旋转速度取得部33取得的旋转速度的值只要是基于稳定旋转状态下的马达20的旋转速度的测量值的值即可。
[0075]
旋转位置检测部36是基于旋转位置检测信号hu、hv、hw,生成表示马达20的旋转位置的信号的功能部。例如,旋转位置检测部36生成将三相的霍尔信号hu、hv、hw合成后的三相合成信号sf。例如,三相合成信号是每隔电角度60
°
切换信号电平的信号。
[0076]
第一基本信号生成部34及第二基本信号生成部37是生成基本信号的功能部,上述基本信号成为用于生成后述的作为驱动信号sd的正弦波驱动信号的基准(例如如果是144步的正弦波则1步宽度=2.5
°
)。这里,基本信号是与马达20(转子)的旋转位置对应的信号(脉冲信号),基本信号的周期与马达20的旋转速度对应。
[0077]
在本实施方式中,将由第一基本信号生成部34生成的基本信号称为“第一基本信号sb1”,将由第二基本信号生成部37生成的基本信号称为“第二基本信号sb2”。
[0078]
图4是表示在驱动信号生成电路3生成的信号的一个例子的图。
[0079]
如图4所示,第二基本信号生成部37使用根据马达20的旋转而生成的旋转位置检测信号(霍尔信号)hu、hv、hw,生成第二基本信号sb2。具体而言,第二基本信号生成部37例如通过将由旋转位置检测部36基于三相的霍尔信号hu、hv、hw生成的三相合成信号sf以规定的数量进行分割,从而生成第二基本信号sb2。
[0080]
例如,第二基本信号生成部37以144步分割电角度360
°
的三相合成信号sf,生成1步2.5
°
的第二基本信号sb2。在该情况下,第二基本信号sb2的1个周期对应于马达20的电角度2.5
°
。
[0081]
这里,如上所述,第二基本信号sb2使用根据马达20的实际旋转而生成的旋转位置检测信号hu、hv、hw而生成,因此受到霍尔元件25u、25v、25w的特性的偏差、马达20的组装精度等的影响。
[0082]
第一基本信号生成部34基于马达20的旋转稳定时的马达20的旋转速度,生成第一基本信号sb1。具体而言,第一基本信号生成部34基于旋转速度取得部33例如作为一定值取得的旋转速度的值,计算应生成的第一基本信号sb1的周期tb1,生成具有计算出的周期tb1的周期信号,并作为第一基本信号sb1输出。
[0083]
这里,第一基本信号sb1的周期tb1例如如以下所示,能够基于马达20的稳定旋转状态下的旋转速度(频率)和与马达20仅旋转规定角度的期间对应的旋转速度检测信号sr(fg信号)的脉冲数来计算。以下,示出第一基本信号sb1的周期的计算方法的一个例子。
[0084]
例如,考虑在马达20处于稳定旋转状态时取得的马达20的旋转速度为500〔hz〕,转子每旋转一周的旋转速度检测信号sr(fg信号)的脉冲数为45〔脉冲/转〕,马达20为10极马达(设置有5组n极和s极)的情况。
[0085]
此时,与马达20的旋转速度对应的周期如下式。
[0086]
1/500(hz)=2(ms)
[0087]
另外,电角度360度的期间,即各个霍尔信号hu、hv、hw的周期基于时钟信号的周期、转子每旋转一周的fg信号的脉冲数、以及马达20的磁极的数量而求出。具体而言,如下
式。
[0088]
2(ms)*45(脉冲/转)/5(组)=18(ms)
[0089]
这里,在决定流过马达20的正弦波电流的平滑度的步数例如是144步的情况下,第一基本信号sb1的周期tb1能够根据下式计算。
[0090]
tb1=18(ms)/144(步)=125(μs)
[0091]
在该情况下,第一基本信号sb1的1周期(tb1)对应于马达20的电角度2.5
°
。
[0092]
第一基本信号生成部34例如使用作为驱动信号生成电路3的程序处理装置所具备的计数器(未图示),根据驱动信号生成电路3内的基准时钟信号生成第一基本信号sb1。具体而言,第一基本信号生成部34使用旋转速度取得部33例如作为一定值取得的马达20的稳定旋转时的旋转速度的值,通过上述的方法,计算周期tb1。然后,第一基本信号生成部34设定与计算出的周期tb1对应的指定计数值,使用计数器将基准时钟信号计数到指定计数值,由此生成作为第一基本信号sb1的脉冲信号。
[0093]
例如,在驱动信号生成电路3内部生成的基准时钟信号的频率为10mhz(周期为100ns),指定计数值为“1250”的情况下,第一基本信号生成部34通过对时钟信号进行“1250次”计数,而生成周期tb1为125μs(=100ns
×
1250)的周期信号(脉冲信号),并作为第一基本信号sb1输出(参照图4)。
[0094]
这样,第一基本信号sb1是假设马达20以由旋转速度取得部33取得的旋转速度旋转的情况下的与马达20(转子)的理论上的旋转位置对应的信号,没有如第二基本信号sb2那样,使用根据马达20的实际旋转而生成的旋转位置检测信号hu、hv、hw生成,因此不受霍尔元件25u、25v、25w的特性的偏差、马达20的组装精度等的影响。
[0095]
选择器38是基于来自判定部32的判定结果信号se,选择从第一基本信号生成部34输出的第一基本信号sb1和从第二基本信号生成部37输出的第二基本信号sb2中的任一方并输出的功能部。
[0096]
具体而言,选择器38在由判定部32判定的判定结果信号se是表示马达20处于不稳定旋转状态的值的情况下,选择并输出第二基本信号sb2,在由判定部32判定的判定结果信号se是表示马达20处于稳定旋转状态的值的情况下,选择并输出第一基本信号sb1。
[0097]
正弦波驱动部39是基于转矩指令信号st和作为基本信号的从选择器38输出的第一基本信号sb1或第二基本信号sb2,生成用于使马达驱动电路2驱动的驱动信号sd的功能部。
[0098]
具体而言,正弦波驱动部39使用从选择器38输出的第一基本信号sb1或第二基本信号sb2,生成调整了脉冲宽度的6种pwm信号并作为驱动信号sd输出,以使马达20以由从转矩指令值取得部31输出的转矩指令(转矩指令信号st)指定的转矩进行动作。通过将驱动信号sd输入到马达驱动电路2,马达驱动电路2对马达20进行正弦波驱动。
[0099]
图5是用于对基于本实施方式所涉及的马达驱动装置1的,马达的旋转速度变化时的马达的驱动方法进行说明的图。
[0100]
在图5中,前面说明的图3的时刻t2以后的马达20的旋转速度的时间变化由参照附图标记301表示。
[0101]
如图5所示,在时刻t2以后,马达20的旋转速度稳定,马达20处于稳定旋转状态。此时,判定部32输出表示马达20处于稳定旋转状态的判定结果信号se,因此选择器38选择并
输出基于在时刻t2取得的马达20的旋转速度的测定值而生成的第一基本信号sb1。正弦波驱动部39使用从选择器38输出的第一基本信号sb1生成驱动信号sd,驱动马达20。
[0102]
然后,例如,在搭载有马达单元100的复印机内发生卡纸等马达20的负载变动的现象,在图5中的从时刻t3到时刻t4的期间内,马达20的旋转速度变动较大。
[0103]
在从时刻t3到时刻t4的期间,由于旋转速度的变动率超出规定的范围r(例如,
±
3%),因此判定部32判定为马达20处于不稳定旋转状态,并输出表示该情况的判定结果信号se。选择器38根据从判定部32输出了表示马达20处于不稳定旋转状态的判定结果信号se,将输出的基本信号从第一基本信号sb1切换为基于与马达20的实际旋转对应的旋转位置检测信号hu、hv、hw的第二基本信号sb2。正弦波驱动部39使用从选择器38输出的第二基本信号sb2生成驱动信号sd,驱动马达20。
[0104]
然后,卡纸等被消除,马达20的旋转速度稳定,在时刻t5,旋转速度的变动率处于规定的范围r内的状态为经过了规定的期间t2。此时,判定部32将判定结果信号se从表示马达20处于不稳定旋转状态的值切换为表示马达20处于稳定旋转状态的值。
[0105]
旋转速度取得部33根据判定结果信号se从表示马达20处于不稳定旋转状态的值被切换为表示马达20处于稳定旋转状态的值,取得马达20的旋转速度的值作为新的一定值。由此,第一基本信号生成部34使用新取得的旋转速度的值,生成第一基本信号sb1。
[0106]
另外,选择器38根据表示马达20处于稳定旋转状态的判定结果信号se被输出,将选择的基本信号从第二基本信号sb2切换为第一基本信号sb1并输出。由此,在时刻t5以后,正弦波驱动部39再次使用第一基本信号sb1生成驱动信号sd,驱动马达20。
[0107]
接下来,对马达驱动装置1的处理流程进行说明。
[0108]
图6是表示本实施方式所涉及的马达驱动装置1进行的处理的流程的流程图。
[0109]
如图6所示,首先,在未进行马达20的驱动的状态下,向马达驱动装置1输入了转矩指令信号st时,驱动信号生成电路3检测转矩指令信号st(步骤s11)。驱动信号生成电路3根据转矩指令信号st的检测而开始马达驱动。
[0110]
首先,驱动信号生成电路3基于与马达20的实际旋转对应的旋转位置检测信号(霍尔信号)hu、hv、hw生成第二基本信号sb2,使用第二基本信号sb2,开始马达20的驱动(步骤s12)。
[0111]
具体而言,例如,在马达20启动时,马达20从动作停止的状态开始旋转,因此马达20不是稳定旋转状态。因此,判定部32输出表示马达20处于不稳定旋转状态的判定结果信号se。选择器38根据该判定结果信号se,选择并输出第二基本信号生成部37基于旋转位置检测信号hu、hv、hw生成的第二基本信号sb2。然后,正弦波驱动部39基于第二基本信号sb2和转矩指令信号st生成驱动信号sd并输出,由此马达20开始旋转。
[0112]
接下来,驱动信号生成电路3判定马达20的旋转是否稳定(步骤s13)。具体而言,判定部32基于旋转速度检测信号sr测量马达的旋转速度,通过上述方法,定期地判定马达20是否处于稳定旋转状态。
[0113]
在马达20处于不稳定旋转状态的情况下(步骤s13:否),驱动信号生成电路3继续进行使用了基于与马达20的实际旋转对应的旋转位置检测信号hu、hv、hw的第二基本信号sb2的马达驱动(步骤s12)。
[0114]
另一方面,在马达20处于稳定旋转状态的情况下(步骤s13:是),驱动信号生成电
路3取得处于稳定旋转状态的马达20的旋转速度的值(步骤s14)。例如,在从判定部32输出的判定结果信号se从表示马达20处于不稳定旋转状态的值被切换为表示马达20处于稳定旋转状态的值时,旋转速度取得部33通过上述方法,取得马达20的旋转速度的值作为一定值。
[0115]
接下来,驱动信号生成电路3使用基于在步骤s14中取得的旋转速度的值的第一基本信号sb1,驱动马达20(步骤s15)。具体而言,选择器38根据在步骤s13中从判定部32输出了表示马达20处于稳定旋转状态的判定结果信号se,选择并输出基于在步骤s14中旋转速度取得部33取得的旋转速度的值的第一基本信号sb1。然后,正弦波驱动部39基于第一基本信号sb1和转矩指令信号st生成驱动信号sd并输出,由此马达20进行旋转。
[0116]
接下来,驱动信号生成电路3判定马达20的稳定旋转状态是否持续(步骤s16)。在马达20不是稳定旋转状态而是不稳定状态的情况下(步骤s16:否),驱动信号生成电路3从使用第一基本信号sb1的马达驱动切换为使用第二基本信号sb2(霍尔信号)的马达驱动(步骤s12)。然后,驱动信号生成电路3再次执行上述的步骤s13~步骤s16。
[0117]
在马达20的稳定旋转状态持续的状态下(步骤s16:是),驱动信号生成电路3检测转矩指令信号st的输入是否停止(步骤s17)。
[0118]
在转矩指令信号st的输入没停止的情况下(步骤s17:否),驱动信号生成电路3继续进行使用了基于由步骤s14取得的旋转速度的第一基本信号sb1的马达驱动(步骤s15)。
[0119]
另一方面,在检测出转矩指令信号st的输入的停止的情况下(步骤s17:是),驱动信号生成电路3开始进行马达20的滑行停止处理(步骤s18)。即,驱动信号生成电路3以使马达20的全相断开的方式生成驱动信号sd。由此,马达20停止滑行。此外,在停止时,也可以进行短路制动等。
[0120]
作为马达20的旋转不均的特征,马达20的组装精度、磁铁的磁化不均引起的偏差成为马达20每旋转一周周期性地产生的旋转不均。另外,霍尔元件25的安装精度引起的偏差成为在马达20旋转一周期间周期性地产生的谐波分量的旋转不均。
[0121]
与此相对,在本实施方式所涉及的马达驱动装置1中,在马达20稳定地旋转的状态下,正弦波驱动部39为了生成驱动信号sd(pwm信号)而使用的基本信号是基于在马达20处于稳定旋转状态时取得的马达20的旋转速度的第一基本信号sb1。即,第一基本信号sb1不是基于根据马达20的实际的旋转而产生偏差的霍尔信号hu、hv、hw而生成的信号,而是假设马达20以取得的一定的旋转速度不变动地旋转,根据该旋转速度的值理论地计算出的信号。因此,在第一基本信号sb1,不会产生由马达20的磁铁的磁化不均引起的偏差、霍尔元件25的安装精度引起的偏差等导致的变动。
[0122]
因此,在马达20稳定旋转时,通过基于第一基本信号sb1而生成的驱动信号sd来驱动马达20,因此能够抑制上述那样的马达20的组装精度、磁铁的磁化不均、霍尔元件25的安装精度引起的偏差成为因素而产生的旋转不均。
[0123]
另外,本实施方式所涉及的马达驱动装置1判定马达20是否处于稳定旋转状态,取得处于稳定旋转状态时的马达20的旋转速度,生成驱动信号sd,因此不仅在如开环方式那样不从上位装置指定目标旋转速度的情况下,而且在如闭环方式那样从上位装置指定的目标旋转速度变化的情况下,也能够进行抑制了旋转不均的马达驱动。
[0124]
这里,闭环方式是指在从外部(例如上位装置)输入了指定马达的目标旋转速度的
目标旋转速度信号的情况下,以使测量出的马达的实际旋转速度与目标旋转速度信号的误差变小的方式生成驱动信号,并基于所生成的驱动信号进行马达驱动的方式。
[0125]
另外,本实施方式所涉及的马达驱动装置1在检测出从马达20的旋转不稳定的状态成为了马达20的旋转稳定的状态的情况下,取得马达20的旋转速度的值,因此能够有效地抑制旋转不均。
[0126]
例如在马达20的旋转速度在规定的范围r内变动的情况下,若连续地取得马达20的旋转速度,则取得的旋转速度的值产生偏差,因此基于该值生成的第一基本信号sb1也产生偏差。其结果,存在无法有效地抑制马达20的旋转不均的可能性。
[0127]
与此相对,本实施方式所涉及的马达驱动装置1以检测出从马达20的旋转不稳定的状态变成了马达20的旋转稳定的状态为契机而取得马达20的旋转速度的值,并将该取得的值例如用作一定值。在稳定旋转状态持续的情况下,马达驱动装置1使用所取得的旋转速度的值(一定值),生成第一基本信号sb1。
[0128]
由此,在马达20处于稳定旋转状态,但马达20的旋转速度在规定的范围r内变动的情况下,不会受到旋转速度的微小变动的影响,能够生成稳定的第一基本信号sb1,因此能够有效地抑制马达20的旋转不均。
[0129]
另外,马达驱动装置1在马达20的旋转稳定的情况下,使用基于所取得的马达20的旋转速度的第一基本信号sb1来驱动马达20,在马达20的旋转不稳定的情况下,使用基于与马达20的实际旋转对应的旋转位置检测信号(霍尔信号)hu、hv、hw的第二基本信号sb2来驱动马达20。
[0130]
由此,在马达20的启动时、负载变动时等马达20的旋转不稳定的状况下,能够以与马达20的负载对应的适当的转矩使马达20旋转,并且在马达20的旋转稳定的状况下,能够抑制马达20的旋转不均。即,能够兼得与负载对应的适当的马达驱动和旋转不均的抑制。
[0131]
《实施方式的扩展》
[0132]
以上,基于实施方式对由本发明人完成的发明具体地进行了说明,但本发明不限定于此,当然能够在不脱离其主旨的范围内进行各种变更。
[0133]
例如,在上述实施方式中,驱动信号生成电路3不限定于上述所示的电路结构。驱动信号生成电路3能够应用为了实现本发明的目的而构成的各种电路结构。
[0134]
上述流程图是具体例,不限定于该流程图,例如,可以在各步骤间插入其他处理,也可以将处理并行化。
[0135]
由上述实施方式的马达驱动装置驱动的马达的相数不限于三相。另外,霍尔元件的数量不限于三个。
[0136]
马达的旋转位置及旋转速度的检测方法没有特别限定。例如,可以不使用霍尔元件、fg图案,而使用其他的旋转位置检测装置来检测旋转位置,也可以通过其他的旋转速度检测装置、基于马达电流、马达的反电动势等的运算来检测旋转速度。
[0137]
马达的驱动方式不限定于正弦波驱动方式。例如,也能够应用梯形波,或者对正弦波施加了特殊的调制的驱动方式。
[0138]
上述实施方式中的处理的一部分或全部可以通过软件来进行,也可以使用硬件电路来进行。即,马达驱动装置1的各构成要素也可以构成为至少其一部分不是通过基于硬件的处理来实现,而是通过基于软件的处理来实现。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。