1.本发明涉及幼儿护理技术领域,特别涉及一种基于大数据分析的吮吸训练管理系统。
背景技术:
2.采用母乳喂养的婴儿发展更为健康,效果包括增强免疫力、提升智力、减少婴儿猝死症的发生、减少儿童期肥胖、减少罹患过敏性疾病,而基于大数据分析显示,宝宝含乳以及喂奶时的位置姿势需要正确,同时保持婴儿处于多样的喂奶姿势,例如在喂养时由于不当的姿势造成婴儿下巴需要过度向前伸吮吸,很可能会让婴儿的下巴向前过度发育,而婴儿吸吮时体位过于竖直,会造成乳汁沿着咽鼓管流入孩子的中耳,而单一或错误的喂奶姿势都容易让宝宝养成不良的吮吸习惯,进而对幼儿的正常发育产生不良影响,因此如何通过训练管理保持幼儿处于一个正常且多样的吸吮训练姿势是非常重要的。为此,我们提出一种基于大数据分析的吮吸训练管理系统。
技术实现要素:
3.本发明的主要目的在于提供一种基于大数据分析的吮吸训练管理系统。
4.为实现上述目的,本发明采取的技术方案为:一种基于大数据分析的吮吸训练管理系统,包括设置于训练区域的家长陪护区间和吮吸训练区间,所述吮吸训练区间位置设有供幼儿训练的哺乳姿势模拟模块和吮吸训练模块,所述哺乳姿势模拟模块包括训练模拟台、右模拟支撑臂、左模拟支撑臂、轴向旋转驱动单元和吮吸位纵向调整单元,所述右模拟支撑臂和所述训练模拟台均通过轴向旋转驱动单元于所述训练模拟台固定安装,所述轴向旋转驱动单元依据训练时所需的婴儿抱握姿势对所述右模拟支撑臂和所述左模拟支撑臂的调整角度预先编程设定,所述训练模拟台和所述右模拟支撑臂分别独立对应坐位吮吸训练以及侧躺吮吸训练时对幼儿的支撑,同时在所述训练模拟台和所述右模拟支撑臂通过轴向旋转驱动单元调整至交叉状态后可实现交叉体姿的吮吸训练,进而达到调整所需模拟训练姿势的目的,所述吮吸训练模块与所述吮吸位纵向调整单元滑动连接用于根据训练姿势调整吸吮点位置,所述吮吸训练模块包括仿真吮吸头、吮吸动作完成检测单元、单次计时单元、微处理器,所述吮吸动作完成检测单元设置于所述仿真吮吸头内侧用于幼儿嘴部与所述仿真吮吸头接触时的感应,同时所述单次计时单元通过所述仿真吮吸头传递的接触感应信号对该次吮吸动作计时在达到时间阈值后通过所述微处理器对完成次数完成记录,进而使医护人员可获知一个姿势内幼儿的正常吮吸时长完成次数,用于后期对训练切换姿势的参考。
5.本发明进一步的改进在于,所述仿真吮吸头通过螺接方式与所述吮吸位纵向调整单元中的活动滑块固定,进而在所述右模拟支撑臂和所述左模拟支撑臂模拟训练姿势调整后对所述吮吸训练模块的纵向位置距离修正。
6.本发明进一步的改进在于,所述右模拟支撑臂以及所述左模拟支撑臂内侧设有体
温模拟单元,通过所述体温模拟单元对所述右模拟支撑臂和所述左模拟支撑臂与幼儿支撑接触时模拟人体温度实现加温。
7.本发明进一步的改进在于,所述右模拟支撑臂以及所述左模拟支撑臂的外侧安装有硅胶包裹套用于提高使用状态下的幼儿贴肤舒适度。
8.本发明进一步的改进在于,所述哺乳姿势模拟模块的底部设有支撑底座,所述支撑底座与所述训练模拟台之间固定连接用于提高接地面防止使用时产生倾倒,且所述支撑底座的顶部设有对幼儿躺坐时起到缓冲作用的接触缓冲垫层。
9.本发明进一步的改进在于,一种基于大数据分析的吮吸训练管理系统的,包括:s1、训练开始前家长位于家长陪护区间区域休息,医护人员将吮吸训练区间区域的右模拟支撑臂和左模拟支撑臂调整至外朝向状态,并通过将待吮吸训练的幼儿抱放于支撑底座上端;s11、采用正常坐位姿势时,待幼儿位于支撑底座上端位置后,医护人员通过将幼儿安抚并经轴向旋转驱动单元将左模拟支撑臂调整至坐位使用状态a,此时左模拟支撑臂对幼儿颈下部分承托,使幼儿保持正常坐位的稳定训练状态,之后通过吮吸位纵向调整单元依据幼儿嘴部位置对吮吸训练模块的纵向高度距离调整,待调整后幼儿即可开始训练;s12、采用侧卧位姿势时,待幼儿位于支撑底座上端位置后,医护人员通过将幼儿安抚并经轴向旋转驱动单元将右模拟支撑臂调整至侧卧位使用状态b,此时右模拟支撑臂环绕于幼儿背部承托,使幼儿保持侧卧位的稳定训练状态,之后通过吮吸位纵向调整单元依据幼儿嘴部位置对吮吸训练模块的纵向高度距离调整,待调整后幼儿即可开始训练;s13、采用交叉抱握位姿势时,待幼儿位于支撑底座上端位置后,医护人员通过将幼儿安抚并经轴向旋转驱动单元同时对训练模拟台和右模拟支撑臂调整至侧卧位使用状态c,此时训练模拟台和右模拟支撑臂同时环绕于幼儿背部进行颈后以交叉形式进行抱握,使幼儿保持交叉抱握位的稳定训练状态;之后通过吮吸位纵向调整单元依据幼儿嘴部位置对吮吸训练模块的纵向高度距离调整,待调整后幼儿即可开始训练;s2、幼儿在受到哺乳姿势模拟模块调节后的支撑时,在幼儿嘴部将仿真吮吸头置于嘴部做出吸吮动作时,通过吮吸动作完成检测单元对嘴部与所述仿真吮吸头之间的接触压力感应并通过单次计时单元对单次吸吮动作产生时长进行计时,在产生时长到达到所设定的时间阈值后代表完成整个吮吸动作,此时微处理器将该完成次数录入,直至完成设定训练量后通过微处理器发送至医护人员提示,医护人员进行下一姿势的切换,从而满足训练效果的同时达到训练管理的目的。
10.与现有技术相比,本发明通过轴向旋转驱动单元将预先编程录入的调节角度依据幼儿训练姿势对右模拟支撑臂和左模拟支撑臂的抱握姿势调整,使幼儿可选择坐位、侧躺或交叉体姿实现吮吸训练,进而达到调整所需模拟训练姿势目的,同时在幼儿嘴部将仿真吮吸头置于嘴部做出吸吮动作时,通过吮吸动作完成检测单元对嘴部与所述仿真吮吸头之间的接触压力感应并通过单次计时单元对单次吸吮动作产生时长进行计时,在产生时长到达到所设定的时间阈值后代表完成整个吮吸动作,此时微处理器将该完成次数录入,直至完成设定训练量后通过微处理器发送至医护人员提示,医护人员通过轴向旋转驱动单元进行下一姿势的切换,从而满足训练效果的同时达到训练管理的目的。
附图说明
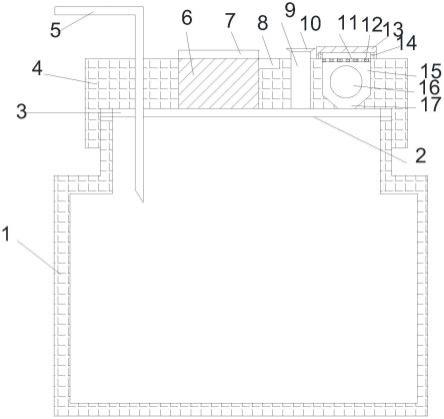
11.图1为本发明一种基于大数据分析的吮吸训练管理系统的组成图。
12.图2为本发明一种基于大数据分析的吮吸训练管理系统a状态、b状态以及c状态的抱握姿势示意图。
13.图3为本发明一种基于大数据分析的吮吸训练管理系统中吮吸训练模块的示意图。
14.图中:1、家长陪护区间;2、吮吸训练区间;3、哺乳姿势模拟模块;301、体温模拟单元;31、训练模拟台;32、右模拟支撑臂;33、左模拟支撑臂;34、轴向旋转驱动单元;35、吮吸位纵向调整单元;4、吮吸训练模块;41、仿真吮吸头;42、吮吸动作完成检测单元;43、单次计时单元;44、微处理器;5、支撑底座;51、接触缓冲垫层。
具体实施方式
15.下面结合具体实施方式对本发明作进一步的说明,其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本专利的限制,为了更好地说明本发明的具体实施方式,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸,对本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的,基于本发明中的具体实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他具体实施方式,都属于本发明保护的范围。
16.实施例1请参阅图1-3,一种基于大数据分析的吮吸训练管理系统,包括设置于训练区域的家长陪护区间1和吮吸训练区间2,吮吸训练区间2位置设有供幼儿训练的哺乳姿势模拟模块3和吮吸训练模块4,哺乳姿势模拟模块3包括训练模拟台31、右模拟支撑臂32、左模拟支撑臂33、轴向旋转驱动单元34和吮吸位纵向调整单元35,右模拟支撑臂32和训练模拟台31均通过轴向旋转驱动单元34于训练模拟台31固定安装,轴向旋转驱动单元34依据训练时所需的婴儿抱握姿势对右模拟支撑臂32和左模拟支撑臂33的调整角度预先编程设定,训练模拟台31和右模拟支撑臂32分别独立对应坐位吮吸训练以及侧躺吮吸训练时对幼儿的支撑,同时在训练模拟台31和右模拟支撑臂32通过轴向旋转驱动单元34调整至交叉状态后可实现交叉体姿的吮吸训练,进而达到调整所需模拟训练姿势的目的,吮吸训练模块4与吮吸位纵向调整单元35滑动连接用于根据训练姿势调整吸吮点位置,吮吸训练模块4包括仿真吮吸头41、吮吸动作完成检测单元42、单次计时单元43、微处理器44,吮吸动作完成检测单元42设置于仿真吮吸头41内侧用于幼儿嘴部与仿真吮吸头41接触时的感应,同时单次计时单元43通过仿真吮吸头41传递的接触感应信号对该次吮吸动作计时在达到时间阈值后通过微处理器44对完成次数完成记录,进而使医护人员可获知一个姿势内幼儿的正常吮吸时长完成次数,用于后期对训练切换姿势的参考。
17.请参阅图2,本实施例中,通过将训练区域分为两部分,家长陪护区间1用于幼儿的训练,吮吸训练区间2用于训练时家长的休息观察,在训练开始前将看护家长疏散至位于家长陪护区间1区域,之后通过医护人员将吮吸训练区间2区域的右模拟支撑臂32和左模拟支撑臂33调整至外朝向的初始未使用状态,将待吮吸训练的幼儿抱放于支撑底座5上端,之后依据训练姿势经轴向旋转驱动单元34将右模拟支撑臂32和左模拟支撑臂33调整至使用状
态a、b、或c,轴向旋转驱动单元34对右模拟支撑臂32以及左模拟支撑臂33的调整旋转角度根据a\b\c状态设定并通过编程录入,a状态对应于轴向旋转驱动单元34在幼儿需要处于常规坐位训练时将左模拟支撑臂33对幼儿颈下部分进行承托时的旋转角度状态,使幼儿由于颈部受到托扶同时背部受到支撑时,保持正常坐位的稳定训练状态,b状态对应轴向旋转驱动单元34在幼儿需要处于躺卧位训练时,将右模拟支撑臂32进行调整后对幼儿背部承托防位移限制,使幼儿在处于躺卧位置时因背部受到支撑位置稳定,c状态对应轴向旋转驱动单元34在幼儿需要交叉体姿进行吮吸训练时,通过将左模拟支撑臂33以及轴向旋转驱动单元34同时旋转至交叉抱握姿势,使幼儿腰、背以及颈部在右模拟支撑臂32和轴向旋转驱动单元34处于交叉姿势下实现吮吸训练,从而根据切换模拟姿势提高吸吮训练姿势的多样性,避免单一或错误的训练姿势让宝宝养成不良的吮吸习惯。
18.其中,仿真吮吸头41通过螺接方式与吮吸位纵向调整单元35中的活动滑块固定,进而在右模拟支撑臂32和左模拟支撑臂33模拟训练姿势调整后对吮吸训练模块4的纵向位置距离修正,本实施例中吮吸位纵向调整单元35为电动滑轨,在依据抱握姿势对右模拟支撑臂32和左模拟支撑臂33进行调整后,通过吮吸位纵向调整单元35中的活动滑块带动吮吸训练模块4进行纵向方向的调整使吮吸训练模块4在幼儿姿势改变使吮吸位置更改后,将吮吸训练模块4活动至接近当前体位的幼儿嘴部位置,进而避免因距离影响造成婴儿下巴需要过度向前伸吮吸。
19.其中,右模拟支撑臂32以及左模拟支撑臂33内侧设有体温模拟单元301,通过体温模拟单元301对右模拟支撑臂32和左模拟支撑臂33与幼儿支撑接触时模拟人体温度实现加温,右模拟支撑臂32以及左模拟支撑臂33的外侧安装有硅胶包裹套用于提高使用状态下的幼儿贴肤舒适度;体温模拟单元301通过对右模拟支撑臂32以及左模拟支撑臂33外侧包裹的硅胶包裹套进行热导温对右模拟支撑臂32和左模拟支撑臂33进行加温,使右模拟支撑臂32和左模拟支撑臂33表面温度贴合人体温度,使幼儿在吮吸训练过程中与右模拟支撑臂32或左模拟支撑臂33的表面接触时,提高贴肤舒适度。
20.其中,哺乳姿势模拟模块3的底部设有支撑底座5,支撑底座5与训练模拟台31之间固定连接用于提高接地面防止使用时产生倾倒,且支撑底座5的顶部设有对幼儿躺坐时起到缓冲作用的接触缓冲垫层51;通过接触缓冲垫层51对于训练时的幼儿进行托扶支撑,使幼儿身体处于一个相对柔软的环境下保证舒适度,同时支撑底座5在支撑于吮吸训练区间2后提高训练模拟台31的支撑面,防止训练模拟台31在使用状态下因重力不平稳造成倾倒。
21.实施例2请参阅图2,本实施例中与实施例1不同的在于,在右模拟支撑臂32以及左模拟支撑臂33的调整角度根据a/b/c使用状态编程设定后,对幼儿采用正常坐位姿势进行吮吸训练时,待幼儿位于支撑底座5上端设置的接触缓冲垫层51位置后,医护人员通过将幼儿安抚并经轴向旋转驱动单元34将左模拟支撑臂33调整至坐位使用状态a,此时左模拟支撑臂33对幼儿颈下部分承托,使幼儿保持正常坐位的稳定训练状态,之后通过吮吸位纵向调整单元35依据幼儿嘴部位置对吮吸训练模块4的纵向高度距离调整,待调整后幼儿即可开始训练,在幼儿受到哺乳姿势模拟模块3调节后的支撑训练时,嘴部将仿真吮吸头41置于嘴部做出吸吮动作时,通过吮吸动作完成检测单元42对嘴部与所述仿真吮吸头41之间的接触压力感应并通过单次计时单元43对单次吸吮动作产生时长进行计时,在产生时长到达到所设定
的时间阈值后代表完成整个吮吸动作,此时微处理器44将该完成次数录入,直至完成设定训练量后通过微处理器44发送至医护人员的医护终端进行提示,医护人员进行下一姿势的切换,例如更变为侧卧位姿势时,医护人员通过将幼儿安抚并经轴向旋转驱动单元34将右模拟支撑臂32调整至侧卧位使用状态b,此时右模拟支撑臂32环绕于幼儿背部承托,使幼儿保持侧卧位的稳定训练状态,之后通过吮吸位纵向调整单元35依据幼儿嘴部位置对吮吸训练模块4的纵向高度距离调整,待调整后幼儿即可开始侧卧位训练,而训练完成后采用交叉抱握位姿势时,待幼儿位于支撑底座5上端位置后,医护人员通过将幼儿安抚并经轴向旋转驱动单元34同时对训练模拟台31和右模拟支撑臂32调整至侧卧位使用状态c,此时训练模拟台31和右模拟支撑臂32同时环绕于幼儿背部进行颈后以交叉形式进行抱握,使幼儿保持交叉抱握位的稳定训练状态,之后通过吮吸位纵向调整单元35依据幼儿嘴部位置对吮吸训练模块4的纵向高度距离调整,待调整后幼儿即可开始下一次训练,从而满足训练效果的同时达到训练管理的目的。
22.以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。