1.本技术涉及电机控制技术领域,尤其涉及一种电机控制系统及方法。
背景技术:
2.在电机控制领域,快速稳定的电流环是确保电机转矩控制性能的关键因素。电流环会产生指令控制电机的转矩,电流环控制的效果越好,才能保证电机输出的转矩更稳定及时。
3.然而,受成本和损耗等因素的影响,中小功率伺服系统的开关频率一般限制在10千赫兹(khz)左右。由于开关频率受到限制,使得电流环的带宽得不到扩展,影响了控制系统的控制性能。另外,目前的控制系统基本都是数字式控制系统,电流的采样通常在计数器上溢或下溢的时刻进行,这会出现电流采样延迟的情况,电流采样延迟会导致控制系统的响应变慢。
技术实现要素:
4.有鉴于此,本技术有必要提出一种电机控制系统及方法来解决上述问题。
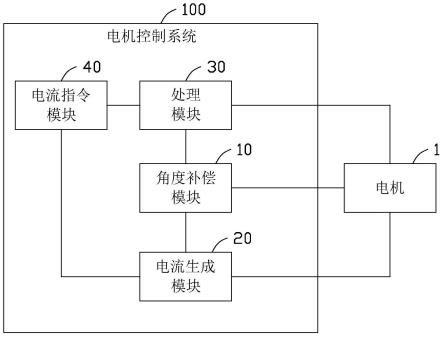
5.本技术提出一种电机控制系统,用于调控电机,电机控制系统包括电流指令模块、角度补偿模块、电流生成模块及处理模块;电流指令模块用于生成直轴电流指令及交轴电流指令;角度补偿模块与电机电性连接;角度补偿模块用于接收电机在第一周期中采样的角度并进行补偿计算,生成第一补偿角度;电流生成模块与角度补偿模块电性连接;电流生成模块用于获取电机中的第一采样电流,并根据第一补偿角度及第一采样电流生成直轴电压及交轴电压;处理模块与电流指令模块、电流生成模块及电机电连接,处理模块用于接收直轴电流、交轴电流、直轴电流指令及交轴电流指令,并根据直轴电流、交轴电流、直轴电流指令及交轴电流指令生成占空比信号,且传输占空比信号至电机。
6.优选的,电流生成模块包括第一变换模块及第二变换模块;第一变换模块分别与电机及第二变换模块电性连接;第一变换模块用于接收第一采样电流,并对第一采样电流进行转换计算,以得到第一变换电流,第一采样电流为三相交流电流,第一变换电流为两相交流电流;第二变换模块与角度补偿模块及第一变换模块电连接,第二变换模块用于接收第一变换电流并对第一变换电流进行转换计算,以得到第二变换电流,第二变换电流为两相直流电流。
7.优选的,电流生成模块还包括电流计算模块;电流计算模块与第二变换模块及处理模块电性连接;电流计算模块用于接收第二变换模块中得出的第二变换电流,并根据第二变换电流计算得出直轴反馈电流及交轴反馈电流。
8.优选的,第二变换电流包括第二变换模块在第一周期的前面两个周期中分别得出的两个第二变换电流,电流计算模块接收两个第二变换电流,并根据两个第二变换电流计算得出直轴反馈电流及交轴反馈电流。
9.优选的,处理模块包括第一减法器及第二减法器;第一减法器与电流计算模块及
电流指令模块电性连接;第一减法器用于接收直轴反馈电流与直轴电流指令,并对直轴反馈电流与直轴电流指令进行做差计算,得到第二输出值;第二减法器与电流计算模块及电流指令模块电性连接,第二减法器用于接收交轴反馈电流与交轴电流指令,并对交轴反馈电流与交轴电流指令进行做差计算,得到第三输出值。
10.优选的,处理器模块还包括第一调节器及第二调节器;第一调节器与第一减法器电性连接,第一调节器用于接收第二输出值,并对第二输出值进行转换,进而生成第一电压,第一电压为直轴电压;第二调节器与第二减法器电性连接,第二调节器用于接收第三输出值,并对第三输出值进行转换,进而生成第二电压,第二电压为交轴电压。
11.优选的,处理器模块还包括第三变换模块及处理单元;第三变换模块分别与第一调节器、第二调节器及角度补偿模块电性连接;第三变换模块用于接收第一电压及第二电压,并对第一电压及第二电压进行反派克变换,分别得出第三电压及第四电压;处理单元与第三变换模块电性连接,处理单元接收第三电压及第四电压,并对第三电压及第四电压进行空间矢量脉宽调制,生成占空比信号。
12.优选的,电机控制系统处理器模块还包括逆变器;逆变器分别与处理单元及电机电性连接;逆变器接收从处理单元中输出的占空比信号,并将占空比信号传入电机。
13.优选的,电流指令模块电机控制系统包括转速模块、第三减法器、第三调节器及电流查表模块;转速模块与角度补偿模块电性连接;转速模块用于接收电机在第一周期中的采样角度,并对电机在第一周期中的采样角度进行微分计算,进而生成转速信号;第三减法器与转速模块电性连接;第三减法器用于接收电机中预设的转速指令与转速信号,并对电机中预设的转速指令与转速信号进行做差计算,得到第一输出值;第三调节器与第三减法器电性连接,第三调节器用于接收第一输出值,并对第一输出值进行调节处理,进而生成电磁转矩;电流查表模块与第三调节器及处理模块电性连接,电流查表模块根据转速信号及电磁转矩进行查表,进而分别生成直轴电流指令及交轴电流指令。
14.本技术还提出一种电机控制方法,电机控制方法应用于电机控制系统中,电机控制方法包括:接收电机的第一采样角度及第一采样电流,并对第一采样角度进行补偿,得到第一补偿角度;接收电机的第一采样电流,并根据第一采样角度、第一补偿角度及第一采样电流生成电机于第一周期的占空比信号。
15.本技术提出的电机控制系统及方法,通过对电机中的采样角度进行角度补偿,进而根据补偿后的角度及采样电流进行一系列的计算与处理,最终得到更为精准的占空比信号。进而电机根据占空比信号控制电机的端电压,使得控制更加精准,同时也有利于提高电机的系统响应速度。
附图说明
16.图1是本技术实施例的电机控制系统的框图;
17.图2是在图1的基础上扩展的系统框图;
18.图3是本技术实施例的电机控制系统的电路图。
19.主要元件符号说明
20.电机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ121.电机控制系统
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
100
22.角度补偿模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10
23.电流生成模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20
24.变换模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
21
25.第一变换模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
211
26.第二变换模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
212
27.电流计算模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
22
28.处理模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
30
29.第一计算模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
31
30.第一减法器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
311
31.第二减法器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
312
32.调节模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
32
33.第一调节器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
321
34.第二调节器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
322
35.第三变换模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
33
36.处理单元
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
34
37.逆变器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
35
38.电流指令模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
40
39.转速模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
41
40.第三减法器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
42
41.第三调节器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
43
42.电流查表模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
44
43.第一周期
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀk44.第二周期
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
k-1
45.第三周期
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
k-2
46.第四周期
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
k 1
47.第一时刻
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
t1
48.第一采样角度
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
θ
49.第一补偿角度
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
φ
50.第一采样电流
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
ik51.第一电流
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
ia52.第二电流
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
ib53.第三电流
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
ic54.第一变换电流
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
i155.第四电流
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀiα
56.第五电流
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀiβ
57.第二变换电流
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
i258.第六电流
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
id59.第七电流
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀiq
60.第八电流
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀid-fdb
61.第九电流
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀiq-fdb
62.转速信号
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀn63.转速指令
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀs64.电磁转矩
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
te65.直轴电流指令
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀid-ref
66.交轴电流指令
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀiq-ref
67.第一电压
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀvd
68.第二电压
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀvq
69.第三电压
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀvα
70.第四电压
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀvβ
71.如下具体实施方式将结合上述附图进一步说明本技术。
具体实施方式
72.下面将结合本技术实施方式中的附图,对本技术实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本技术一部分实施方式,而不是全部的实施方式。
73.请参阅图1,本技术提出一种电机控制系统100,电机控制系统100与电机1电性连接,用于调控电机1。具体地,电机控制系统100用于根据采样到的电机1的相关信号(例如,电机1的三相交流电流及电机1的角度等),且对电机1的角度进行补偿,进而再通过一系列的计算得出电机1的占空比。
74.电机控制系统100包括角度补偿模块10、电流生成模块20、处理模块30及电流指令模块40。
75.在本实施例中,角度补偿模块10为独立设置的模块,角度补偿模块10分别与电机1及电流生成模块20电性连接。在一些实施例中,角度补偿模块10可设置于其他与电机1形成连接的模块(例如,电流生成模块20)中。
76.在一些实施例中,电机1的角度信号是电机控制的重要参数。在对电机1的角度进行采样时,会有一定的延迟。如此,角度补偿模块10用以对采样到的电机1的角度进行角度补偿计算。角度补偿模块10通过对采样的角度进行补偿,可使得采集的角度更加精确,更有利于提高电机1的系统的响应速度。
77.实例地,本技术以电机1与电机控制系统100于第一周期k的运行过程为例,介绍电机控制系统100对电机1产生的作用。
78.在本技术实施例中,将第一周期k的前一周期记为第二周期k-1,将第二周期k-1的前一周期记为第三周期k-2,将第一周期k的后一周期记为第四周期k 1。
79.在本实施例中,获取电机1在第一周期k的第一时刻t1的采样角度,即第一采样角度θ(k)。其中,第一时刻t1为第一周期k开始的时刻。第一采样角度θ(k)为电机1的转子角度。接着,角度补偿模块10接收第一采样角度θ(k),并对第一采样角度θ(k)进行补偿计算,得到第一补偿角度φ(k)。
80.可以理解,第一补偿角度φ(k)的计算方式如下:
81.φ(k)=θ(k) ω(k)
·
ts82.其中,ω(k)为第一时刻t1时电机1的角速度,ts为采样周期,即载波周期。
83.请一并参阅图2及图3,电流生成模块20包括变换模块21及电流计算模块22。
84.变换模块21分别与电机1、角度补偿模块10及电流计算模块22电性连接。变换模块21包括第一变换模块211及第二变换模块212。
85.第一变换模块211与电机1电连接,用以对电机1的三相交流电流进行第一变换,以将三相交流电流转换为两相交流电流。可以理解,在本技术实施例中,第一变换可以为克拉克(clarke)变换。
86.示例的,在本实施例中,获取电机1第一周期k在第一时刻t1的电流,即第一采样电流ik(k),第一采样电流ik(k)为第一时刻t1时电机1的三相交流电流。接着,第一变换模块211接收第一采样电流i1(k),并对第一采样电流i1(k)进行转换计算,得到第一变换电流i1(k),第一变换电流i1(k)为两相交流电流。其中,第一采样电流i1包括第一变换电流i1(k)包括第四电流i
α
(k)及第五电流i
β
(k)。
87.第一变换电流i1的计算方式如下:
[0088][0089]
第二变换模块212与第一变换模块211及角度补偿模块10电连接。第二变换模块212用以接收来自第一变换模块211的两相交流电(例如第四电流i
α
(k)及第五电流i
β
(k)),并根据来自角度补偿模块10的第一补偿角度φ(k)将两相交流电流进行第二转换,以将两相交流电转换为两相直流电流,即根据第一补偿角度φ(k)将第一变换电流i1(k)转换为两相直流电流。可以理解,在本技术实施例中,第二变换可以为派克(park)变换。
[0090]
示例的,在本实施例中,第二变换模块212接收第一变换电流i1(k)并对第一变换电流i1(k)进行转换计算,得到第二变换电流i2(k),第二变换电流i2(k)为两相直流电流。第二变换电流i2(k)包括第六电流id(k)及第七电流iq(k),第六电流id(k)为直轴电流,第七电流iq(k)为交轴电流。第六电流id(k)及第七电流iq(k)可用于第四周期k 1的直轴反馈电流及交轴反馈电流的计算。
[0091]
可以理解,第二变换电流i2(k)的计算方式如下:
[0092][0093]
如图3所示,电流计算模块22与第二变换模块212电连接。电流计算模块22用以接收来自第二变换模块212的第二变换电流i2(k),并对第二变换电流i2(k)进行计算,得出直轴反馈电流及交轴反馈电流。
[0094]
示例的,在本实施例中,电流计算模块22接收第二变换电流i2(k-1)并根据第二变换电流i2(k-1)及第二周期k-1中得出的其他计算值(例如,vd(k-1)、ω(k-1))进行计算,以得到第八电流i
d-fdb
(k)和第九电流i
q-fdb
(k)。第二变换电流i2(k-1)为第二周期k-1中第二变换模块122计算得出的两相直流电流。第八电流i
d-fdb
(k)为第一周期k内的直轴反馈电流,第九电流i
q-fdb
(k)为第一周期k内的交轴反馈电流。
[0095]
具体地,第八电流i
d-fdb
(k)和第九电流i
q-fdb
(k)的计算方式如下:
[0096][0097][0098]
其中,r为电机1的相电阻,ld为电机1的直轴电感,lq为电机1的交轴电感,为电机1的永磁磁链;ω(k-2)为第二周期k-2时的电机1的角速度,ω(k-1)为第二周期k-1时的电机1的角速度;vd(k-2)为第三周期k-2时由第一调节器321输出的直轴电压,vd(k-1)为第二周期k-1时由第一调节器321输出的直轴电压;vq(k-2)为第三周期k-2时由第二调节器322输出的交轴电压,vq(k-1)为第二周期k-1时由第二调节器322输出的交轴电压。id(k-2)为第三周期k-2时由第二变换模块212计算得出的直轴电流,iq(k-2)为第三周期k-2时由第二变换模块212计算得出的交轴电流;id(k-1)为第二周期k-1时由第二变换模块212计算得出的直轴电流,iq(k-1)为第二周期k-1时由第二变换模块212计算得出的交轴电流。ts为采样周期,即载波周期。
[0099]
请再次参阅图3,电流指令模块40包括转速模块41、第三减法器42、第三调节器43及电流查表模块44。
[0100]
在本实施例中,转速模块41电连接至电机1,用于接收第一采样角度θ(k),并对第一采样角度θ(k)进行微分计算,进而生成转速信号n(k)。
[0101]
第三减法器42与转速模块41电连接。第三减法器42用于接收电机1中预设的转速指令s与转速信号n(k),并对电机1中预设的转速指令s与转速信号n(k)进行做差计算,得到第一输出值。
[0102]
第三调节器43电连接至第三减法器42,用于接收第一输出值并对第一输出值进行调节处理,进而生成电磁转矩te。
[0103]
电流查表模块44与第三调节器43、转速模块41、第一减法器311及第二减法器312电连接。电流查表模块44用于根据转速信号n(k)及电磁转矩te进行查表,进而分别生成直轴电流指令i
d-ref
(k)及交轴电流指令i
q-ref
(k)。可以理解,生产的直轴电流指令i
d-ref
(k)及交轴电流指令i
q-ref
(k)分别输出至第一减法器311及第二减法器312。
[0104]
可以理解,在一些实施例中,转速指令s为电机1中预设的程序代码指令。电流查表模块44在运行时需使用查找二维表格,二维表格为电机1于电机测试台架上进行标定后生成的。
[0105]
请再次参阅图2及图3,处理模块30包括第一计算模块31、调节模块32、第三变换模块33、处理单元34及逆变器35。其中,调节模块32包括第一调节器321及第二调节器322。第一计算模块31包括第一减法器311及第二减法器312。第一调节器321与第一减法器311电性连接,第二调节器322与第二减法器312电性连接,第一调节器321及第二调节器322都与第三变换模块33电性连接。
[0106]
可以理解,第一调节器321、第二调节器322及第三调节器43为pi(proportional integral controller,pi)调节器,也称比例调节器。pi调节器用于按比例反应偏差,一旦出现了偏差,pi调节器立进行调节,以减少偏差。
[0107]
可以理解,第一减法器311及第二减法器312均电连接至电流计算模块22。第一减法器311及第二减法器312还均电连接至电流指令模块40。其中,第一减法器311接收来自电流计算模块22的第八电流i
d-fdb
(k)与来自电流指令模块40的直轴电流指令i
d-ref
(k),并对第八电流i
d-fdb
(k)与直轴电流指令i
d-ref
(k)进行做差计算,得到第二输出值。
[0108]
第二减法器312接收来自电流计算模块22的九电流i
q-fdb
(k)与来自电流指令模块40的交轴电流指令i
q-r
(k),并对第九电流i
q-fdb
(k)与交轴电流指令i
q-ref
(k)进行做差计算,得到第三输出值。
[0109]
第一调节器321接收第二输出值,并对第二输出值进行处理,进而生成第一电压vd(k)。第二调节器322接收第三输出值,并对第三输出值进行处理,进而生成第二电压vq(k)。其中,第一电压vd(k)及第二电压vq(k)为直流电压,第一电压vd(k)为直轴电压,第二电压vq(k)为交轴电压。第一电压vd(k)及第二电压vq(k)可用于第四周期k 1的直轴反馈电流及交轴反馈电流的计算。
[0110]
第三变换模块33分别与第一调节器321、第二调节器322及角度补偿模块10电性连接。第三变换模块33用以根据角度补偿模块10的第一补偿角度φ(k)将来自第一调节器321及第二调节器322的直流电压(例如第一电压vd(k)及第二电压vq(k))进行第三转换,将直流电压转换为交流电压。可以理解,第三转换可以为反派克转换。
[0111]
在一些实施例中,第一电压vd(k)及第二电压vq(k)输入至第三变换模块33进行反派克变换,分别得出第三电压v
α
(k)及第四电压v
β
(k)。
[0112]
第三电压v
α
(k)及第四电压v
β
(k)的计算方式如下:
[0113][0114]
处理单元34与第三变换模块33电性连接。处理单元34用以接收第三电压v
α
(k)及第四电压v
β
(k),并对第三电压v
α
(k)及第四电压v
β
(k)进行空间矢量脉宽调制(sdace vector pulse width modulation,svpwm),生成电机1于第一周期k中的占空比信号。
[0115]
逆变器35分别与处理单元34及电机1电性连接。逆变器35用以接收从处理单元34中输出的占空比信号,并将占空比信号传入电机1,进而电机1根据占空比信号控制电机1的端电压。
[0116]
在一些实施例中,逆变器35可以为三相功率逆变器,逆变器35有六个功率开关。进而,来自处理单元34的占空比信号以六路占空比信号的形式输入至逆变器35。
[0117]
可以理解,在一些实施例中,第一采样电流ik在经过第一变换模块211进行克拉克变换以及经过第二变换模块212进行派克变换后,由交流电变为了直流电,直流电于电机控制系统100中传输。
[0118]
在一些实施例中,从电流采样的时刻,到根据此刻电流采样的数值计算得到相应的占空比值,再要到下一个采样时刻进行更新,一共需经历一个载波周期的时间,也就是说电流采样的延时时间为一个载波周期。电流采样延迟会导致电机1的系统响应速度变慢,而通过对第一采样角度θ(k)进行角度补偿后,得到第一补偿角度φ(k),根据第一补偿角度φ(k)计算得出的占空比值更准确,使得电机1的系统响应更迅速,进而使得电机1操作更稳定及时。
[0119]
在一些实施例中,电机控制系统100与电机1完成一周期的运行后,电机控制系统
100将此周期的数据存储于电流计算模块22中,并对应前一周期的数据进行赋值,使得此周期的数据可运用于下一周期,进而再进入下一周期的运行。
[0120]
在本实施例中,电机控制系统100与电机1完成第一周期k的运行后,电机1在第一周期k中计算得出的数据(例如,第二变换电流i2(k)、第一电压vd(k)、第二电压vq(k)等)存储于电流计算模块22中,并运用于在第四周期k 1中。其中,电机1在第一周期k中得出的数据运用于第四周期k 1的过程中,包括一赋值过程。例如,将ω(k)赋值给ω(k-1)、将id(k)赋值给id(k-1)、将iq(k)赋值给iq(k-1)、将vd(k)赋值给vd(k-1)、将vq(k)赋值给vq(k-1)。可以理解,同时,电机1在第二周期k-1中得出的数据运用于第四周期k 1的过程中,也包括一赋值过程。例如,将ω(k-1)赋值给ω(k-2)、将id(k-1)赋值给id(k-2)、将iq(k-1)赋值给iq(k-2)、将vd(k-1)赋值给vd(k-2)、将vq(k-1)赋值给vq(k-2)。
[0121]
具体的,电机控制系统100应用的电机控制方法包括:
[0122]
s401:获取采样到的电机1的角度、电流,进而执行s402。
[0123]
s402:角度补偿模块10对第一采样角度θ进行补偿,得到第一补偿角度φ,进而执行s403。
[0124]
在一些实施例中,电机的角度信号是电机控制的重要参数,在对电机的角度进行采样时,会有一定的延迟,进而对采样的角度进行补偿,可使得采集的角度更加精确,更有利于提高电机1的系统的响应速度。
[0125]
s403:第一变换模块211对第一采样电流ik进行克拉克变换,得到第一变换电流i1,进而执行s404。
[0126]
在一些实施例中,第一变换模块211用以将三相电流转换为两相交流电流。第一变换电流i1为两相交流电流。第一变换电流i1包括第四电流i
α
及第五电流i
β
。
[0127]
s404:第二变换模块212对第一变换电流i1进行派克变换,得到第二变换电流i2,进而执行s405。
[0128]
在一些实施例中,第二变换模块212用以将两相交流电流转换为两相直流电流。第二变换电流i2为两相直流电流。第二变换电流i2包括第六电流id及第七电流iq,第六电流id为直轴电流,第七电流iq为交轴电流。
[0129]
s405:电流计算模块22接收第二变换模块212在上一周期得出的第二变换电流i2,并根据上一周期得出的第二变换电流i2及其他计算数据计算得出第八电流i
d-fdb
及第九电流i
q-fd
,进而执行s406。
[0130]
第八电流i
d-fdb
为直轴反馈电流,第九电流i
q-fd
为交轴反馈电流。
[0131]
s406:转速模块41对第一采样角度θ进行微分计算,生成转速信号n,进而执行s407。
[0132]
s407:第三减法器42接收电机1中预设的转速指令s与转速信号n,并对电机1中预设的转速指令s与转速信号n进行做差计算,得到第一输出值。进一步地,第三调节器43接收第一输出值并对第一输出值进行处理,进而生成电磁转矩te,进而执行s408。
[0133]
s408:电流查表模块44根据转速信号n及电磁转矩te进行查表,进而分别生成直轴电流指令i
d-re
及交轴电流指令i
q-ref
,进而执行s409。
[0134]
s409:第一减法器311接收第八电流i
d-fdb
与直轴电流指令i
d-ref
,并对第八电流i
d-fdb
与直轴电流指令i
d-ref
进行做差计算,得到第二输出值。第二减法器接收第九电流i
q-fdb
与交轴电流指令i
q-ref
,并对第九电流i
q-fdb
与交轴电流指令i
q-ref
进行做差计算,得到第三输出值,进而执行s410。
[0135]
s410:第一调节器321接收第二输出值并进行处理,进而生成第一电压vd。第二调节器322接收第三输出值并进行处理,进而生成第二电压vq,进而执行s411。
[0136]
s411:第三变换模块33接收第一电压vd及第二电压vq,并对第一电压vd及第二电压vq进行反派克变换,得出第三电压v
α
及第四电压v
β
,进而执行s412。
[0137]
在一些实施例中,第三变换模块33用以将直流电压转换为交流电压,且采用第一补偿角度φ进行计算。
[0138]
s412:处理单元34根据第三电压v
α
及第四电压v
β
,生成电机1于第一周期k的占空比信号,并将占空比信号输入至逆变器,进而执行s413。
[0139]
s413:逆变器35接收从处理单元34中输出的占空比信号,并将占空比信号传入电机1,进而电机1根据占空比信号控制电机1的端电压。同时,逆变器35接收流经处理单元34的直流电流,并将直流电流转换为交流电流传入电机1。
[0140]
在一些实施例中,逆变器35可以为三相功率逆变器,逆变器35包括六个功率开关。进而,占空比信号以六路占空比信号的形式输入至逆变器35。
[0141]
本技术提出的电机控制系统100,通过对电机1中的采样角度进行角度补偿,进而根据补偿后的角度及采样电流进行一系列的计算与处理,最终得到更为精准的占空比信号。进而电机1根据占空比信号控制电机1的端电压,使得控制更加精准,同时也有利于提高电机1的系统响应速度。
[0142]
本技术领域的普通技术人员应当认识到,以上的实施方式仅是用来说明本技术,而并非用作为对本技术的限定,只要在本技术的实质精神范围之内,对以上实施例所作的适当改变和变化都应该落在本技术要求保护的范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。