1.本发明属于路面裂缝检测技术领域,尤其涉及能够降低理论计算复杂性,判断准确度高的一种基于探地雷达沥青路面裂缝类型快速检测方法。
背景技术:
2.沥青路面裂缝类型主要包括疲劳裂缝和反射裂缝,疲劳裂缝一般由于车辆重复加载作用下引起沥青面层的疲劳开裂,仅存在于沥青面层,而反射裂缝是由于半刚性基层在温度和湿度变化作用下产生的横向裂缝反射至路面形成的。当外界自由水通过路面裂缝不断进入结构层内部,并积存于路基和基层顶部,在行车荷载的反复作用下将基层细集料和路基土冲刷挤压而出,从而使得层间底部失去支撑而形成局部脱空,导致道路结构性破坏。传统的检测办法通过钻芯取样判断裂缝的类型,而无法准确了解每条裂缝类型及内部发育情况,在养护设计时就无法根据每条裂缝的类型进行有针对性处治,使设计具有一定的盲目性。
3.近年来探地雷达凭借其连续无损,速度快,精度高等优点,广泛应用于公路的深层病害精细化无损检测领域。探地雷达在单一均匀理想介质中,裂缝的顶底端点对应于一条绕射波双曲线波组,所以其顶底端点容易识别。但探地雷达在层状均匀介质中传播时,在穿过的每个介质分界面都会形成多次绕射波双曲线波组,使得裂缝的顶端点和底端点对应的绕射波双曲线波组形态相似,而无法判断裂缝的底端点。目前针对反射裂缝的类型判断主要凭借经验法和理论计算法,但由于沥青路面属于多相离散随机介质层状结构,一是道路结构的复杂介质干扰双曲线的清晰度从而影响经验的判断;二是理论计算的复杂性在道路长剖面检测难以快速准确检测识别裂缝的类型。
技术实现要素:
4.本发明的目的就是为了克服上述现有技术的缺陷,而提供一种基于探地雷达的沥青路面裂缝类型快速检测方法,用于解决目前经验判断法的准确度低和理论计算的复杂性。
5.本发明采用的技术方案是:
6.一种基于探地雷达沥青路面裂缝类型快速检测方法,包括如下步骤:
7.步骤1)、采用探地雷达对裂缝地下数据进行采集,获得电磁波时域信号的波形图;
8.步骤2)、对采集的探地雷达数据进行数据编辑;
9.步骤3)、根据电磁波在各层材料间反射振幅的变化,确定沥青面层与基层、基层与路基的层间分界面;
10.步骤4)、对探地雷达剖面中沥青混凝土面层与半刚性基层之间分界面反射波同相轴下方0.7~1.3ns时间范围内各裂缝位置雷达数据的振幅值进行统计并做归一化处理,求得最大值a
12
,同时获得其沿测线长度的振幅强度变化曲线l
12
;
11.步骤5)、对探地雷达剖面中半刚性基层与填土路基之间分界面反射波同相轴下方
1.7~2.7ns时间范围内各裂缝位置雷达数据的振幅值进行统计并做归一化处理,求得最大值a
23
,获得其沿测线长度的振幅强度变化曲线l
23
;
12.步骤6)、沿振幅强度变化曲线l
12
中分别找到裂缝绕射波的振幅强度峰值点a1,a2,
…ai
,沿振幅强度变化曲线l
23
中分别找到裂缝绕射波的振幅强度峰值点
13.步骤7)、根据不同裂缝之间的a
12
和a
23
的大小关系,判断该裂缝为疲劳裂缝或反射裂缝;
14.步骤8)、根据同一条裂缝实际位置与振幅强度变化曲线l
12
和l
23
中的振幅强度峰值点的对应位置关系,判断该反射裂缝为垂直裂缝或倾斜裂缝。
15.进一步的,所述步骤1)中,采用探地雷达沿垂直于裂缝走向进行数据采集。
16.进一步的,所述步骤1)中,探地雷达使用400mhz的地面耦合天线。
17.进一步的,所述步骤2)中,数据编辑包括废道消除、方向调整、漂移处理、道均衡处理。
18.进一步的,所述步骤7)根据不同裂缝a
12
和a
23
的大小关系,判断该裂缝为疲劳裂缝或反射裂缝的方法为,以最小单位为1km中所检测到的所有裂缝组成样本库,所述样本库中的裂缝数量不小于20条,在样本库中随机选择2条裂缝,分别命名为裂缝1和裂缝2,当裂缝1的a
12
≥裂缝2的a
23
时,判断裂缝1为疲劳裂缝,当裂缝1的a
23
<裂缝2的a
23
时,判断裂缝2为反射裂缝。
19.进一步的,所述步骤8)中,当该条实际位置与振幅强度变化曲线l
12
和l
23
的峰值在一条铅垂线上,则判断该裂缝为垂直裂缝,反之则判断其为倾斜裂缝。
20.本发明的有益效果在于:现有裂缝类型和是否倾斜判别是通过经验判断,没有做到定量化,难以实现全过程的精准控制。本技术统计各裂缝位置雷达反射波数据的振幅值并对之做归一化处理,找出各裂缝位置附近的最大值a
12
和a
23
,通过比较不同裂缝a
12
和a
23
数值关系的方法进行裂缝类型识别,其优点在于:
①
该方法充分利用了裂缝顶端产生绕射波的波场特征,完全排除了人为主观因素和个人经验的影响;
②
将能够对比的特征进行了定量化,降低了由于经验不足导致错判的概率;
③
无论是裂缝类别的判别还是裂缝是否倾斜的判别,均能通过批量的特征量统计得到具体数值,比较数值大小和峰值位置就能判别裂缝类型和判断裂缝是否倾斜,与传统经验判断、肉眼识别对比提高了效率。与现有技术相比,本技术通过计算分界面反射波同相轴下方一定时间范围内各道雷达数据的振幅绝对值进行累积求和取均值的方法进行裂缝类型识别,克服目前经验法判别道路长距离剖面多条裂缝类型时存在的精度低效率低的问题。
21.其中,常用雷达天线频率有200mhz、400mhz、900mhz及1.5ghz,200mhz天线频率太低,分辨率达不到裂缝检测的精度要求,900mhz及1.5ghz天线检测深度浅,不能完全满足底部较深裂缝的检测要求,400mhz雷达天线所发射出的电磁波的分辨率完全可以满足常规裂缝检测的分辨率要求,同时400mhz天线的有效检测深度深于常规裂缝底部的最大深度,选用400mhz既能满足检测深度要求又能满足分辨率要求,能达到两者兼顾的目的;
22.在步骤4)中,由于沥青混凝土面层(介电常数为7.56)与半刚性基层(介电常数为9)之间分界反射波同相轴持续时长在一个特定范围内,选取同相轴下方0.7~1.3ns范围内的数据能够保证在这个时窗内可以把沥青混凝土面层与半刚性基层界面雷达反射波全部包括在内;
23.在步骤5)中,由于半刚性基层(介电常数为9)大于沥青混凝土面层(介电常数为7.56)的介电常数,会导致子波在半刚性基层中的波长大于沥青混凝土面层中的波长,致使反射波的频率降低、周期增加,因此选择1.7ns~2.7ns的时间范围可以把全部的雷达反射波包括在内;
24.在步骤7)中,根据比较不同裂缝的a
12
和a
23
的大小关系来判断裂缝的类型,是由发明人在实际情景背景下进行数学建模和数值模拟创造性的得出的规律的总结,并得到实验的验证;
25.在步骤8)中,由于裂缝顶端引起的绕射波顶点会叠加在沥青面层与水稳层界面所产生的反射波上,导致上层反射波在绕射点的处的振幅值最大,其绕射点的横向位置与裂缝顶点的横向位置对应一致;裂缝底端也会产生绕射波,同样其产生的绕射波顶点会叠加在水稳层与路基界面所产生的反射波上,导致下层反射波在绕射点的处的振幅值最大,该绕射点的横向位置与裂缝底端点的横向位置对应一致,因此当反射裂缝实际位置与振幅强度变化曲线l
12
和l
23
的峰值在一条铅垂线上,可以判断该反射裂缝为垂直裂缝。
26.总之,本发明提供的一种基于探地雷达沥青路面裂缝类型快速检测方法具有科学、准确、快速的优点。
附图说明
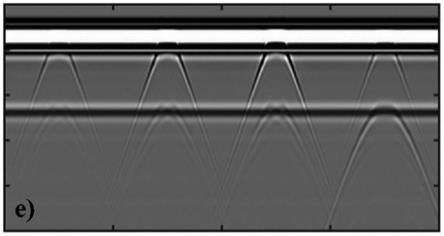
27.图1是实施例1所采用的一种基于探地雷达沥青路面裂缝类型快速检测方法的步骤2)得到道路结构层裂缝探地雷达实测剖面图;
28.图2是实施例1所采用的一种基于探地雷达沥青路面裂缝类型快速检测方法的步骤4)得到的振幅强度变化曲线l
12
;
29.图3是实施例1所采用的一种基于探地雷达沥青路面裂缝类型快速检测方法的步骤5)得到的振幅强度变化曲线l
23
;
30.图4是实施例1中裂缝1位置的钻芯取样照片;
31.图5是实施例1中裂缝4位置的钻芯取样照片;
32.图6是实施例2所采用的一种基于探地雷达沥青路面裂缝类型快速检测方法的步骤2)得到道路结构层裂缝探地雷达实测剖面图;
33.图7是实施例2所采用的一种基于探地雷达沥青路面裂缝类型快速检测方法的步骤4)得到的振幅强度变化曲线l
12
;
34.图8是实施例2所采用的一种基于探地雷达沥青路面裂缝类型快速检测方法的步骤5)得到的振幅强度变化曲线l
23
;
35.图9是实施例2中裂缝1位置的钻芯取样照片;
36.图10是实施例2中裂缝2位置的钻芯取样照片;
37.图11是实施例3所采用的一种基于探地雷达沥青路面裂缝类型快速检测方法的步骤2)得到道路结构层裂缝探地雷达实测剖面图;
38.图12是实施例3所采用的一种基于探地雷达沥青路面裂缝类型快速检测方法的步骤4)和5)得到的振幅强度变化曲线l
12
和l
23
对比图;
39.图13是实施例3中裂缝1位置的钻芯取样照片;
40.图14是实施例3中裂缝2位置的钻芯取样照片。
具体实施方式
41.本发明的核心是提供一种基于探地雷达沥青路面裂缝类型快速检测方法。
42.实施例1
43.本实施例为陕西靖王高速某段结构层裂缝检测,该高速公路沥青面层厚度15cm,基层为36cm的半刚性水稳基层。采集2.6km的数据,检测到裂缝数量为56条建立样本库,从样本库中随机选择2条裂缝,即为本实施例中的裂缝1和裂缝4。下面结合附图对本实施例的内容作进一步说明:
44.一种基于探地雷达沥青路面裂缝类型快速检测方法,按照如下步骤实施:
45.步骤1)、采用主频400mhz的探地雷达地面耦合天线,沿道路行车方向、垂直于横向裂缝走向进行数据采集,获得电磁波时域信号的波形图;
46.步骤2)、对采集的探地雷达数据进行数据编辑,包括废道消除、方向调整、漂移处理、道均衡、增益调节等,如图1所示,得到道路结构层裂缝探地雷达实测剖面图;其中废道剔除:天线未放置好或者在天线移动过程中进行了无效的数据采集,这些扫描在数据处理前应当从雷达数据中提出或者充零,即为废道剔除;漂移处理:在雷达剖面上的数据会出现全是正、全是负或正负半周不对称的现象,这样的数据含有直流漂移量,在数据处理之前需要将这样的直流漂移量进行消除或压制,以减小其对于雷达数据的影响;
47.步骤3)、根据电磁波在各层材料间反射振幅的变化,确定深度4.62ns处的同相轴为地面直达波,深度9.58ns处的反射波同相轴为面层与基层分界面,深度17.32ns处的反射波同相轴为基层与路基分界面;
48.步骤4)、根据图1所显示内容,实测剖面中包含有4条裂缝,在沥青混凝土面层与半刚性基层交界面反射波同相轴下方(9.58 0.7)ns-(9.58 1.3)ns时间范围内,对裂缝引起的绕射波(包含两翼在内)范围内的上层反射截面振幅值进行统计振幅值并对之做归一化处理之后选出最大值a
12
,得到振幅强度变化曲线l
12
,如图2所示;
49.步骤5)、在半刚性基层与路基交界面反射波同相轴下方(17.32 1.7)ns-(17.32 2.7)ns时间范围内,对裂缝引起的绕射波(包含两翼在内)范围内的下层反射截面振幅值进行统计并对振幅做归一化处理之后选出选定出最大值a
23
,得到振幅强度变化曲线l
23
,如图3所示;
50.步骤6)、沿振幅强度变化曲线l
12
中分别找到裂缝绕射波的振幅强度峰值点a1,a2,
…ai
,沿振幅强度变化曲线l
23
中分别找到裂缝绕射波的振幅强度峰值点
51.步骤7)、选取裂缝1和裂缝4为比较样本,对比上层和下层反射波振幅值归一化之后的变化曲线图2和图3,图2中所示,裂缝1的a
12
为0.7569,裂缝4的a
12
为0.7389,裂缝1a
12
≥裂缝4a
12
,可以判定裂缝1为疲劳裂缝;图3中所示,裂缝1的a
23
为0.7507,裂缝4的a
23
为1,裂缝1a
23
<裂缝4a
23
,可以判定裂缝4为反射裂缝。
52.以上结论经过现场钻芯取样方法进行验证后,证实裂缝1为疲劳裂缝(如图4),裂缝4为反射裂缝(如图5)。
53.实施例2
54.本实施例为沪陕高速某段结构层裂缝检测,采集1.8km的数据,检测到裂缝数量为37条建立样本库,从样本库中随机选择2条裂缝,即为本实施例中的裂缝1和裂缝2。下面结合附图对本实施例的内容作进一步说明:
55.一种基于探地雷达沥青路面裂缝类型快速检测方法,按照如下步骤实施:
56.步骤1)、采用主频400mhz的探地雷达地面耦合天线,沿道路行车方向、垂直于横向裂缝走向进行数据采集,获得电磁波时域信号的波形图;
57.步骤2)、对采集的探地雷达数据进行数据编辑,包括废道消除、方向调整、漂移处理、道均衡、增益调节等,如图6所示,得到道路结构层裂缝探地雷达实测剖面图;其中废道剔除:天线未放置好或者在天线移动过程中进行了无效的数据采集,这些扫描在数据处理前应当从雷达数据中提出或者充零,即为废道剔除;漂移处理:在雷达剖面上的数据会出现全是正、全是负或正负半周不对称的现象,这样的数据含有直流漂移量,在数据处理之前需要将这样的直流漂移量进行消除或压制,以减小其对于雷达数据的影响;
58.步骤3)、根据电磁波在各层材料间反射振幅的变化,确定深度5.01ns处的同相轴为地面直达波,深度9.22ns处的反射波同相轴为面层与基层分界面,深度18.64ns处的反射波同相轴为基层与路基分界面;
59.步骤4)、根据图6所显示内容,实测剖面中包含有2条裂缝,在沥青混凝土面层与半刚性基层交界面反射波同相轴下方(9.22 0.7)ns-(9.22 1.3)ns时间范围内,对裂缝引起的绕射波(包含两翼在内)范围内的上层反射截面振幅值进行统计振幅值并对之做归一化处理之后选出最大值a
12
,得到振幅强度变化曲线l
12
,如图7所示;
60.步骤5)、在半刚性基层与路基交界面反射波同相轴下方(18.64 1.7)ns-(18.64 2.7)ns时间范围内,对裂缝引起的绕射波(包含两翼在内)范围内的下层反射截面振幅值进行统计并对振幅做归一化处理之后选出选定出最大值a
23
,得到振幅强度变化曲线l
23
,如图8所示;
61.步骤6)、沿振幅强度变化曲线l
12
中分别找到裂缝绕射波的振幅强度峰值点a1,a2,
…ai
,沿振幅强度变化曲线l
23
中分别找到裂缝绕射波的振幅强度峰值点
62.步骤7)、选取裂缝1和裂缝2为比较样本,对比上层和下层反射波振幅值归一化之后的变化曲线图7和图8,图7中所示,裂缝1的a
12
为0.3892,裂缝2的a
12
为0.4084,裂缝2a
12
≥裂缝1a
12
,可以判定裂缝2为疲劳裂缝;图8中所示,裂缝1的a
23
为0.9389,裂缝2的a
23
为0.4766,裂缝2a
23
<裂缝1a
23
,可以判定裂缝1为反射裂缝。
63.以上结论经过现场钻芯取样方法进行验证后,证实裂缝1为疲劳裂缝(如图9),裂缝2为反射裂缝(如图10)。
64.实施例3
65.本实施例为武汉绕城高速某段结构层裂缝检测,采集3.2km的数据,检测到裂缝数量为63条建立样本库,从样本库中随机选择2条裂缝,即为本实施例中的裂缝1和裂缝2。下面结合附图对本实施例的内容作进一步说明:
66.一种基于探地雷达沥青路面裂缝类型快速检测方法,按照如下步骤实施:
67.步骤1)、采用主频400mhz的探地雷达地面耦合天线,沿道路行车方向、垂直于横向裂缝走向进行数据采集,获得电磁波时域信号的波形图;
68.步骤2)、对采集的探地雷达数据进行数据编辑,包括废道消除、方向调整、漂移处理、道均衡、增益调节等,如图11所示,得到道路结构层裂缝探地雷达实测剖面图;其中废道剔除:天线未放置好或者在天线移动过程中进行了无效的数据采集,这些扫描在数据处理前应当从雷达数据中提出或者充零,即为废道剔除;漂移处理:在雷达剖面上的数据会出现
全是正、全是负或正负半周不对称的现象,这样的数据含有直流漂移量,在数据处理之前需要将这样的直流漂移量进行消除或压制,以减小其对于雷达数据的影响;
69.步骤3)、根据电磁波在各层材料间反射振幅的变化,确定深度4.85ns处的同相轴为地面直达波,深度9.86ns处的反射波同相轴为面层与基层分界面,深度17.96ns处的反射波同相轴为基层与路基分界面;
70.步骤4)、根据图11所显示内容,实测剖面中包含有2条裂缝,在沥青混凝土面层与半刚性基层交界面反射波同相轴下方(9.86 0.7)ns-(9.86 1.3)ns时间范围内,对裂缝引起的绕射波(包含两翼在内)范围内的上层反射截面振幅值进行统计振幅值并对之做归一化处理之后选出最大值a
12
,得到振幅强度变化曲线l
12
,如图12中的线条a)所示;
71.步骤5)、在半刚性基层与路基交界面反射波同相轴下方(17.96 1.7)ns-(17.96 2.7)ns时间范围内,对裂缝引起的绕射波(包含两翼在内)范围内的下层反射截面振幅值进行统计并对振幅做归一化处理之后选出选定出最大值a
23
,得到振幅强度变化曲线l
23
,如图12中的线条b)所示;
72.步骤6)、沿振幅强度变化曲线l
12
中分别找到裂缝绕射波的振幅强度峰值点a1,a2,
…ai
,沿振幅强度变化曲线l
23
中分别找到裂缝绕射波的振幅强度峰值点
73.步骤7)、通过裂缝自身的顶部和底部最强振幅值为倾斜或铅锤位置关系判断裂缝为倾斜裂缝还是垂直裂缝,图11中的裂缝1和裂缝2其振幅强度变化曲线l
12
和l
23
分别如图12中的曲线a)和b)所示,将裂缝1的l
12
和l
23
峰值点进行连线得到一条向左的倾斜箭头,判定裂缝1为向左倾斜的裂缝;将裂缝2的l
12
和l
23
峰值点进行连线得到一条铅锤方向的箭头,判定裂缝2为垂直裂缝。
74.以上结论经过现场钻芯取样方法进行验证后,证实裂缝1为倾斜裂缝(如图13),裂缝4为垂直裂缝(如图14)。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。