1.本发明属于伺服系统控制领域,具体涉及一种控制力矩陀螺框架伺服系统反步抗干扰转速控制方法。
背景技术:
2.控制力矩陀螺是一种高效的角动量交换装置,具有输出力矩范围大、输出力矩连续、能耗比高的特点,常用于航天器姿态控制领域。控制力矩陀螺力矩输出利用了陀螺效应,通过框架伺服系统旋转,改变由高速转子系统提供的角动量方向,从而产生期望的控制力矩。因此,控制力矩陀螺框架伺服系统的转速控制性能是提高控制力矩陀螺力矩输出性能的关键,需要具有响应速度快、跟踪误差小的特点。然而,控制力矩陀螺框架伺服是一个具有强耦合、非线性的复杂系统,且在实际运行过程中会受到包括摩擦力矩、未建模动态以及由脉宽调制逆变器引起的电压波动等多来源多通道干扰的影响。具体而言,摩擦力矩是控制力矩陀螺框架伺服系统中必然存在的一种扰动力矩,由框架转动、温度、使用磨损和轴承润滑条件等因素引起。对框架伺服系统静态性能影响主要体现为转速跟踪静差及稳态极限环振荡;对动态性能影响主要体现为低速爬行和速度过零时的波形畸变。其次,受控制力矩陀螺安装平台、工作环境、参数漂移等影响,控制力矩陀螺框架伺服系统存在未建模动态干扰,会导致框架伺服系统产生转速跟踪静差及震荡。最后,驱动电路中使用的脉宽调制逆变器会产生电压畸变,从而导致电压波动,直接影响控制器控制电压输出,进而使控制力矩陀螺框架伺服系统转速控制精度下降。因此一种控制力矩陀螺框架伺服系统反步抗干扰转速控制方法是一项关键技术,对提高控制力矩陀螺力矩输出性能具有重要意义。
3.目前,针对多源多通道干扰下的控制力矩陀螺框架伺服系统转速控制问题,国内外专家提出了较多控制方法。文章《控制力矩陀螺框架伺服系统期望补偿自适应鲁棒控制》针对控制力矩陀螺框架伺服系统未知参数及lugre摩擦参数不确定性问题,设计了一种期望补偿自适应鲁棒控制器实现对摩擦非线性的精确补偿,从而实现框架伺服系统的高精度控制。该方法能自适应得到干扰参数,但依赖于有采用的干扰模型,且没有考虑驱动电路中脉宽调制逆变器导致的电压波动的影响。文章《基于神经网络算法的单框架控制力矩陀螺系统复合控制》提出一种基于双神经网络的前馈-反馈控制系统,通过卡尔曼滤波处理在不同条件下得到的运行数据,并基于神经网络构建了涵盖控制通道与干扰通道信息的虚拟广义被控对象模型,由此设计了神经网络前馈补偿器。该方法不依赖与模型信息,但需要先行进行实验以获得足够的训练数据,且未充分考虑在轨运行环境导致的未建模动态影响。中国发明专利cn201610248632.9中将滑模控制方法与矢量控制方法结合,抑制低频干扰力矩,从而提升框架转速控制性能和鲁棒性。该方法实现较为简便,但忽略了脉宽调制逆变器导致的电压波动的影响。中国发明专利cn110456630b中设计了谐波干扰观测器对高频转子振动干扰进行估计,并通过积分滑模控制器对其余干扰进行抑制,提高了框架系统抗干扰能力。该方法采用了双环控制结构,但仅重点讨论了速度环控制器和干扰观测器设计,没有进一步考虑电流环控制器对系统性能的影响。
技术实现要素:
4.为了解决控制力矩陀螺框架伺服系统中存在多源多通道干扰包括摩擦力矩,未建模动态以及脉宽调制逆变器引起的电压波动,影响控制性能问题,本发明提供一种控制力矩陀螺框架伺服系统反步抗干扰转速控制方法,实现对摩擦力矩,未建模动态干扰的精确估计和补偿,并抑制补偿误差及电压波动。在保证控制力矩陀螺框架伺服系统抗干扰能力的同时,提高其控制性能。本发明具有抗干扰能力强,参数选取简便,易于工程实现的特点。
5.本发明的技术解决方案为:一种控制力矩陀螺框架伺服系统反步抗干扰转速控制方法,建立含有多源多通道干扰包括摩擦力矩,未建模动态以及脉宽调制逆变器引起的电压波动的控制力矩陀螺框架伺服系统动力学模型,设计扩张状态观测器对摩擦力矩以及未建模动态干扰进行估计,设计基于反步法的控制力矩陀螺框架伺服系统转速控制器,给出扩张状态观测器及转速控制器组成复合控制器的参数选取指导,完成控制力矩陀螺框架伺服系统反步抗干扰转速控制。
6.具体包括以下步骤:
7.第一步,建立含有包括摩擦力矩,未建模动态以及脉宽调制逆变器引起的电压波动的多源多通道干扰的控制力矩陀螺框架伺服系统动力学模型,其中的摩擦力矩,未建模动态干扰用扩张状态表示;多通道干扰指上述干扰出现在控制力矩陀螺框架伺服系统动力学模型的不同部分,其中摩擦力矩未建模动态影响伺服系统转速,电压波动影响伺服系统控制电压;
8.第二步,基于第一步中模型,设计扩张状态观测器对摩擦力矩以及未建模动态干扰进行估计,得到干扰估计值及干扰估计值对时间的一阶导数;
9.第三步,利用第二步中得到干扰估计值及干扰估计值对时间的一阶导数,设计基于反步法的控制力矩陀螺框架伺服系统转速控制器,对干扰估计补偿误差及电压波动进行抑制;
10.第四步,给出扩张状态观测器及转速控制器组成复合控制器的参数选取指导,完成控制力矩陀螺框架伺服系统反步抗干扰转速控制。
11.进一步地,建立含有多源多通道干扰包括摩擦力矩,未建模动态以及脉宽调制逆变器引起的电压波动的控制力矩陀螺框架伺服系统动力学模型,其中的摩擦力矩,未建模动态干扰用扩张状态表示:
[0012][0013]
其中,x1为摩擦力矩,未建模动态干扰组成的扩张状态;tf为摩擦力矩干扰;tu为未建模动态干扰;和分别为摩擦力矩干扰和未建模动态干扰对时间的一阶导数;x2为控制力矩陀螺框架伺服转速;j为框架转动的总转动惯量;k
t
为电磁转矩系数;x3、x4分别为定
子电流在q、d轴向的分量;uq、ud分别为定子电压在q、d轴向的分量;vq、vd分别为脉宽调制逆变器引起的电压波动在q、d轴向的分量;ls为定子的电感;rs为定子电阻;n
p
为极对数;为磁链量;分别为扩张状态、控制力矩陀螺框架伺服转速、q轴电流分量和d轴电流分量对时间的一阶导数。
[0014]
进一步地,基于第一步中模型,设计扩张状态观测器对摩擦力矩以及未建模动态干扰进行估计,得到干扰估计值及干扰估计值对时间的一阶导数:
[0015][0016]
其中,τ1表示控制力矩陀螺框架伺服系统转速x2的估计;τ2表示扩张状态描述干扰x1的估计;k1和k2为扩张状态观测器参数;分别为转速估计值和扩张状态描述干扰估计值对时间的一阶导数。
[0017]
进一步地,利用第二步中得到干扰估计值及干扰估计值对时间的一阶导数,设计基于反步法的控制力矩陀螺框架伺服系统转速控制器,对干扰估计补偿误差及电压波动进行抑制:
[0018][0019]
其中,xd、分别为控制力矩陀螺框架伺服期望转速及其对时间的一阶导数和二阶导数;z1为控制力矩陀螺框架伺服转速跟踪误差;α1为虚拟控制量;m1、m2、m3、a1为定义的中间变量;z2为q轴电流与虚拟控制量之差;c1、c2、c3为控制器参数;ε1、ε2为干扰估计误差抑制参数;ε3、ε4分别为q、d轴电压波动抑制参数;分别为控制器控在q、d上的控制输出。
[0020]
进一步地,给出扩张状态观测器及转速控制器组成复合控制器的参数选取指导,完成控制力矩陀螺框架伺服系统反步抗干扰转速控制:根据第二步所设计扩张状态状态观测器,其参数k1和k2的选取可等价为选取期望的观测器带宽系数ωo与阻尼系数ξo:
[0021][0022]
其中,ξo为扩张状态观测器期望阻尼系数;ωo为扩张状态观测器期望带宽系数。减小阻尼系数可提高观测器估计速度,但会导致估计值超调量增大。减小带宽系数可增强观测器抗噪声性能,但会导致干扰估计速度减慢。
[0023]
根据第一步中所建立含有多源多通道干扰包括摩擦力矩,未建模动态以及脉宽调制逆变器引起的电压波动的控制力矩陀螺框架伺服系统动力学模型,结合第三步中所设计基于反步法的控制力矩陀螺框架伺服系统转速控制器,各状态收敛误差可表示为:
[0024][0025]
其中,β1为控制器参数中最小值的二倍;分别为干扰估计误差的上界、q轴电压波动的上界和d轴电压波动的上界;ρ1为集总的干扰估计误差项;v1为闭环系统状态误差李雅普诺夫函数;为闭环系统李雅普诺夫函数关于时间的一阶导数;增大控制器系数c1,c2,c3中最小值,可提高控制力矩陀螺框架伺服系统转速跟踪误差收敛速度,但会导致输出控制量增大;减小干扰估计误差抑制参数ε1、ε2或减小电压波动抑制参数ε3、ε4可减小控制力矩陀螺框架伺服系统转速跟踪误差,但会导致控制输出控制量增大。
[0026]
本发明与现有技术相比的优点在于:本发明涉及的一种控制力矩陀螺框架伺服系统反步抗干扰转速控制方法,针对现有方法未充分考虑多源多通道干扰包括摩擦力矩,未建模动态以及脉宽调制逆变器引起的电压波动问题,建立含有摩擦力矩,未建模动态以及电压波动的控制力矩陀螺框架伺服系统动力学模型。设计扩张状态观测器对摩擦力矩以及未建模动态干扰进行估计,并利用干扰估计值及其对时间的一阶导数,设计基于反步法的控制力矩陀螺框架伺服系统转速控制器,对干扰估计补偿误差及电压波动进行抑制。通过选取适当的扩张状态观测器及转速控制器参数,形成组成具有较强抗干扰性能的复合控制器,使控制力矩陀螺框架伺服系统能够在多源多通道干扰影响下保持理想的控制性能。此外,本发明具参数选取简便,易于工程实现的,适用于存在多源多通道干扰的控制力矩陀螺框架伺服系统。
附图说明
[0027]
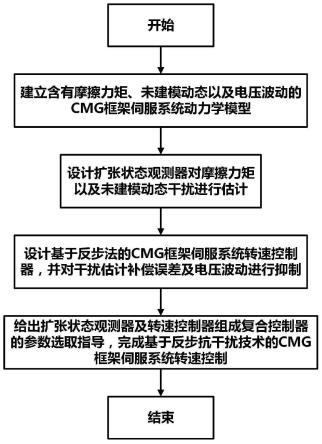
图1为本发明一种控制力矩陀螺框架伺服系统反步抗干扰转速控制方法的设计流程图;
[0028]
图2为本发明一种控制力矩陀螺框架伺服系统反步抗干扰转速控制方法的控制结构框图;
[0029]
图3为本发明一种控制力矩陀螺框架伺服系统反步抗干扰转速控制方法的扩张状态观测器干扰估计值与实际干扰值对比图;
[0030]
图4为本发明一种控制力矩陀螺框架伺服系统反步抗干扰转速控制方法与无电压波动抑制控制方法的转速跟踪性能仿真对比图。
具体实施方式
[0031]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
[0032]
如图1所示,首先,通过实验信号注入的方法,离线辨识得到控制力矩陀螺框架伺服系统模型参数,包括定子电感及电阻、框架伺服系统总转动惯量、框架轴阻尼系数、极对数、转子磁链等参数,根据机械特性及电磁特性,建立含有包括摩擦力矩,未建模动态以及电压波动的多源多通道干扰的控制力矩陀螺框架伺服系统动力学模型,其中的摩擦力矩,未建模动态干扰用扩张状态表示;其次,设计扩张状态观测器,估计摩擦力矩以及未建模动态干扰,得到干扰估计值及干扰估计值对时间的一阶导数;再次,利用得到干扰估计值及干扰估计值对时间的一阶导数,设计基于反步法的控制力矩陀螺框架伺服系统转速控制器,对干扰估计补偿误差及电压波动进行抑制;最后,给出扩张状态观测器及转速控制器组成复合控制器的参数选取指导,完成控制力矩陀螺框架伺服系统反步抗干扰转速控制。
[0033]
具体实施步骤如下:
[0034]
第一步,建立含有包括摩擦力矩,未建模动态以及脉宽调制逆变器引起的电压波动的多源多通道干扰的控制力矩陀螺框架伺服系统动力学模型,多通道干扰指上述干扰出现在控制力矩陀螺框架伺服系统动力学模型的不同部分,其中摩擦力矩,未建模动态影响伺服系统转速,电压波动影响伺服系统控制电压;其中的摩擦力矩,未建模动态干扰用扩张状态表示:
[0035][0036]
其中,x1为摩擦力矩,未建模动态干扰组成的扩张状态,取值为x1=0.3-0.2sin(2t);tf为摩擦力矩干扰;tu为未建模动态干扰;和分别为摩擦力矩干扰和未建模动态干扰对时间的一阶导数;x2为控制力矩陀螺框架伺服转速;j为框架转动的总转动惯量,取值为j=0.12kg
·
m2;k
t
为电磁转矩系数,取值为k
t
=0.504;x3、x4分别为定子电流在q、d轴向的分量;uq、ud分别为定子电压在q、d轴向的分量;vq、vd分别为脉宽调制逆变器引起的电压波动在q、d轴向的分量,取值为vq=0.01cos(6n
p
θ),vd=0.01sin(6n
p
θ),θ为框架角度;ls为
定子的电感,取值为ls=12mh;rs为定子电阻,取值为rs=9.7ω;n
p
为极对数,取值为n
p
=4;为磁链量,取值为为磁链量,取值为分别为扩张状态、控制力矩陀螺框架伺服转速、q轴电流分量和d轴电流分量对时间的一阶导数。
[0037]
第二步,基于第一步中模型,设计扩张状态观测器对摩擦力矩以及未建模动态干扰进行估计,得到干扰估计值及干扰估计值对时间的一阶导数:
[0038][0039]
其中,τ1表示控制力矩陀螺框架伺服系统转速x2的估计;τ2表示扩张状态描述干扰x1的估计;k1和k2为扩张状态观测器参数,取值为k1=140,k2=1002;分别为转速估计值和扩张状态描述干扰估计值对时间的一阶导数。
[0040]
第三步,利用第二步中得到干扰估计值及干扰估计值对时间的一阶导数,设计基于反步法的控制力矩陀螺框架伺服系统转速控制器,对干扰估计补偿误差及电压波动进行抑制:
[0041][0042]
其中,xd、分别为控制力矩陀螺框架伺服期望转速及其对时间的一阶导数和二阶导数;z1为控制力矩陀螺框架伺服转速跟踪误差;α1为虚拟控制量;m1、m2、m3、a1为定义的中间变量;z2为q轴电流与虚拟控制量之差;c1、c2、c3为控制器参数,取值为c1=40,c2=30,c3=30;ε1、ε2为干扰估计误差抑制参数,取值为ε1=0.5,ε2=0.5;ε3、ε4分别为q、d轴电压波动抑制参数,取值为ε3=0.5,ε4=0.5;分别为控制器控在q、d上的控制输出。
[0043]
第四步,给出扩张状态观测器及转速控制器组成复合控制器的参数选取指导,完成控制力矩陀螺框架伺服系统反步抗干扰转速控制:根据第二步所设计扩张状态状态观测器,其参数k1和k2的选取可等价为选取期望的观测器带宽系数ωo与阻尼系数ξo:
[0044][0045]
其中,ξo为扩张状态观测器期望阻尼系数,取值为ξo=0.7;ωo为扩张状态观测器期望带宽系数,取值为ωo=100。减小阻尼系数可提高观测器估计速度,但会导致估计值超调量增大。减小带宽系数可增强观测器抗噪声性能,但会导致干扰估计速度减慢。
[0046]
根据第一步中所建立含有包括摩擦力矩,未建模动态以及脉宽调制逆变器引起的电压波动的多源多通道干扰的控制力矩陀螺框架伺服系统动力学模型,结合第三步中所设计基于反步法的控制力矩陀螺框架伺服系统转速控制器,各状态收敛误差可表示为:
[0047][0048]
其中,β1为控制器参数中最小值的二倍;分别为干扰估计误差的上界、q轴电压波动的上界和d轴电压波动的上界;v1为闭环系统状态误差李雅普诺夫函数。增大控制器系数c1,c2,c3中最小值,可提高控制力矩陀螺框架伺服系统转速跟踪误差收敛速度,但会导致输出控制量增大。减小干扰估计误差抑制参数ε1、ε2或减小电压波动抑制参数ε3、ε4可减小控制力矩陀螺框架伺服系统转速跟踪误差,但会导致控制输出控制量增大。本发明一种控制力矩陀螺框架伺服系统反步抗干扰转速控制方法控制框图如图2所示。
[0049]
结合含有摩擦力矩、未建模动态以及电压波动的控制力矩陀螺框架伺服系统动力学模型,所设计扩张状态观测器及转速控制器组成复合控制器进行仿真,给定期望框架转速为xd=sin(t)
°
/s。;
[0050]
控制力矩陀螺框架伺服系统反步抗干扰转速控制方法的扩张状态观测器干扰估计值与实际干扰值对比图如图3所示,本发明的扩张状态观测器具有较好的干扰估计精度,稳态干扰估计误差小于0.025nm。如图4所示的本发明的控制力矩陀螺框架伺服系统反步抗干扰转速控制方法与无电压波动抑制控制方法的转速跟踪性能仿真对比图,与无电压波动抑制控制方法相比,本发明控制方法下的转速跟踪误差减小了23.8%,显著抑制了电压波动对控制精度的影响,有利于提升控制力矩陀螺框架伺服系统控制性能。
[0051]
本发明说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。