技术特征:
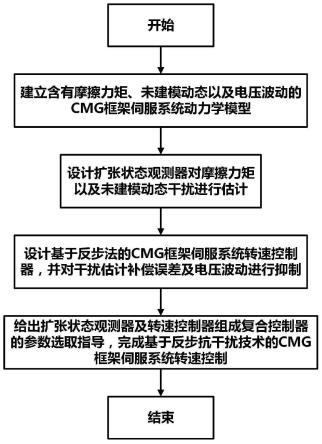
1.一种控制力矩陀螺框架伺服系统反步抗干扰转速控制方法,其特征在于,包括以下步骤:第一步,建立含有包括摩擦力矩,未建模动态以及脉宽调制逆变器引起的电压波动的多源多通道干扰的控制力矩陀螺框架伺服系统动力学模型,其中的摩擦力矩,未建模动态干扰用扩张状态表示;多通道干扰指上述干扰出现在控制力矩陀螺框架伺服系统动力学模型的不同部分,其中摩擦力矩、未建模动态影响伺服系统转速,电压波动影响伺服系统控制电压;第二步,基于第一步中模型,设计扩张状态观测器对摩擦力矩以及未建模动态干扰进行估计,得到干扰估计值及干扰估计值对时间的一阶导数;第三步,利用第二步中得到干扰估计值及干扰估计值对时间的一阶导数,设计基于反步法的控制力矩陀螺框架伺服系统转速控制器,对干扰估计补偿误差及电压波动进行抑制;第四步,给出扩张状态观测器及转速控制器组成复合控制器的参数选取指导,完成控制力矩陀螺框架伺服系统反步抗干扰转速控制。2.根据权利要求1所述的一种控制力矩陀螺框架伺服系统反步抗干扰转速控制方法,其特征在于:所述第一步中的摩擦力矩,未建模动态干扰用扩张状态表示:其中,x1为摩擦力矩,未建模动态干扰组成的扩张状态;t
f
为摩擦力矩干扰;t
u
为未建模动态干扰;和分别为摩擦力矩干扰和未建模动态干扰对时间的一阶导数;x2为控制力矩陀螺框架伺服转速;j为框架转动的总转动惯量;k
t
为电磁转矩系数;x3、x4分别为定子电流在q、d轴向的分量;u
q
、u
d
分别为定子电压在q、d轴向的分量;v
q
、v
d
分别为脉宽调制逆变器引起的电压波动在q、d轴向的分量;l
s
为定子的电感;r
s
为定子电阻;n
p
为极对数;为磁链量;分别为扩张状态、控制力矩陀螺框架伺服转速、q轴电流分量和d轴电流分量对时间的一阶导数。3.根据权利要求2所述的一种控制力矩陀螺框架伺服系统反步抗干扰转速控制方法,其特征在于:所述第二步中,基于第一步中模型,设计扩张状态观测器对摩擦力矩以及未建模动态干扰进行估计,得到干扰估计值及干扰估计值对时间的一阶导数:其中,τ1表示控制力矩陀螺框架伺服系统转速x2的估计;τ2表示扩张状态描述干扰x1的
估计;k1和k2为扩张状态观测器参数;分别为转速估计值和扩张状态描述干扰估计值对时间的一阶导数。4.根据权利要求3所述的一种控制力矩陀螺框架伺服系统反步抗干扰转速控制方法,其特征在于:利用所述第二步中得到干扰估计值及干扰估计值对时间的一阶导数,设计基于反步法的控制力矩陀螺框架伺服系统转速控制器,对干扰估计补偿误差及电压波动进行抑制:其中,x
d
、分别为控制力矩陀螺框架伺服期望转速及其对时间的一阶导数和二阶导数;z1为控制力矩陀螺框架伺服转速跟踪误差;α1为虚拟控制量;m1、m2、m3、a1为定义的中间变量;z2为q轴电流与虚拟控制量之差;c1、c2、c3为控制器参数;ε1、ε2为干扰估计误差抑制参数;ε3、ε4分别为q、d轴电压波动抑制参数;分别为控制器控在q、d上的控制输出。5.根据权利要求4所述的一种控制力矩陀螺框架伺服系统反步抗干扰转速控制方法,其特征在于:所述第四步的具体步骤如下:(1)根据所述第二步所设计扩张状态状态观测器,其参数k1和k2的选取可等价为选取期望的观测器带宽系数ω
o
与阻尼系数ξ
o
:其中,ξ
o
为扩张状态观测器期望阻尼系数;ω
o
为扩张状态观测器期望带宽系数;减小阻尼系数可提高观测器估计速度,但会导致估计值超调量增大。减小带宽系数可增强观测器抗噪声性能,但会导致干扰估计速度减慢;(2)根据第一步中所建立含有包括摩擦力矩,未建模动态以及电压波动的多源多通道
干扰的控制力矩陀螺框架伺服系统动力学模型,结合所述第三步中所设计基于反步法的控制力矩陀螺框架伺服系统转速控制器,各状态收敛误差可表示为:其中,β1为控制器参数中最小值的二倍;分别为干扰估计误差的上界、q轴电压波动的上界和d轴电压波动的上界;ρ1为集总的干扰估计误差项;v1为闭环系统状态误差李雅普诺夫函数;为闭环系统李雅普诺夫函数关于时间的一阶导数;增大控制器系数c1,c2,c3中最小值,可提高控制力矩陀螺框架伺服系统转速跟踪误差收敛速度,但会导致输出控制量增大;减小干扰估计误差抑制参数ε1、ε2或减小电压波动抑制参数ε3、ε4可减小控制力矩陀螺框架伺服系统转速跟踪误差,但会导致控制输出控制量增大。
技术总结
本发明涉及一种控制力矩陀螺框架伺服系统反步抗干扰转速控制方法,针对控制力矩陀螺框架伺服系统中存在的多源多通道干扰包括摩擦力矩,未建模动态以及脉宽调制逆变器引起的电压波动,影响控制性能问题。首先,建立含有摩擦力矩、未建模动态以及电压波动干扰的控制力矩陀螺框架伺服系统动力学模型;其次,设计扩张状态观测器对摩擦力矩以及未建模动态干扰进行估计;再次,设计基于反步法的框架伺服系统转速控制器,对干扰估计补偿误差及电压波动进行抑制;最后,给出扩张状态观测器及转速控制器组成复合控制器的参数选取指导,完成控制力矩陀螺框架伺服系统反步抗干扰转速控制。本发明具有抗干扰能力强,参数选取简便,易于工程实现的特点。程实现的特点。程实现的特点。
技术研发人员:乔建忠 杨永健 崔洋洋 郭雷 孟岩
受保护的技术使用者:北京航空航天大学
技术研发日:2022.03.10
技术公布日:2022/6/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。