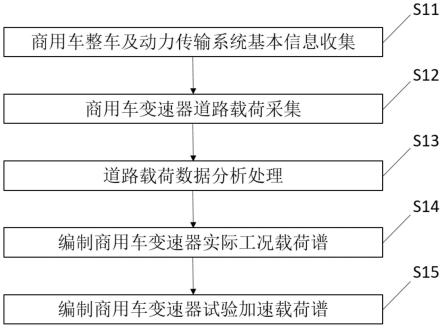
1.本发明涉及货车监控领域,尤其涉及一种货车运载场景识别系统。
背景技术:
2.载货汽车一般称作货车,又称作卡车,指主要用于运送货物的汽车,有时也指可以牵引其他车辆的汽车,属于商用车辆类别。一般可依造车的重量分为重型和轻型两种。绝大部分货车都以柴油引擎作为动力来源,但有部分轻型货车使用汽油、石油气或者天然气。
3.卡车的正式名称为载货汽车,是运载货物和商品用的一种汽车形式,包括自卸卡车、牵引卡车、非公路和无路地区的越野卡车和各种专为特殊需要制造的车辆(如机场摆渡车、消防车和救护车、油罐车、集装箱牵引卡车等)。
4.当前,一辆货车可以承载的货物种类很多,有时会遇到货车承载多种不同种类货物混载的场景,在这种情况下,货车监控方无法确定应该使用哪一种力度的监控机制以实现实际运输场景需求的监控效果,同时,混载容易造成货物尺寸过宽,对货物的正常运载形成阻碍。
技术实现要素:
5.为了解决相关领域的技术问题,本发明提供了一种货车运载场景识别系统,能够针对货车混载货物的特殊场景,通过识别当前承载的各种货物种类以获得分别对应的运载监控等级,并基于其中最高数值的运载监控等级作为货车的当前监控机制的监控参数,同时还集成了高精度的货物超宽检测机制,从而为道路运输的安全进行提供保障。
6.相比较于现有技术,本发明至少需要具备以下两处突出的实质性特点:
7.(1)对货车当前运载的各个货物进行类型检测以获得分别对应的运载监控等级,并将各个货物分别对应的运载监控等级中最高的运载监控等级作为设定货车当前监控强度的关键参考信息,其中,运载监控等级越高,视频监控部件的帧率越高,安全应对部件的启动数量越多;
8.(2)采用针对性的视觉检测机制对货车当前运载的货物的最大宽度进行有效辨识,以及时确认货车当前运载的货物是否超宽。
9.根据本发明的一方面,提供了一种货车运载场景识别系统,所述系统包括:
10.用户操控机构,设置在货车的驾驶室内的控制台上,用于在货车装载货物且未搭上雨布之前,在用户操作下,发送用于启动货物监控的触发指令;
11.枪式采集机构,设置在货车的驾驶室的顶棚的中央位置,与所述用户操控机构无线连接,用于在接收到所述用户操控机构发送的触发指令时,触发对所述驾驶室后方的运载车厢的图像采集操作,以获得对应的后方运载图像;
12.云端存储机构,设置在无线网络端,用于存储货车运载的各个种类货物分别对应的基准外观图案;
13.第一映射器件,设置在货车的驾驶室内的控制台内,与所述枪式采集机构无线连
接,用于对接收到的后方运载图像执行几何校正处理,以获得对应的第一映射图像;
14.第二映射器件,设置在所述第一映射器件的左侧,与所述第一映射器件连接,用于对接收到的第一映射图像执行维纳滤波处理,以获得对应的第二映射图像;
15.第三映射器件,设置在所述第一映射器件的右侧,与所述第二映射器件连接,用于对接收到的第二映射图像执行应用指数变换的图像信号增强处理,以获得对应的第三映射图像;
16.种类判断器件,分别与所述云端存储机构和所述第三映射器件连接,用于基于货车运载的各个种类货物分别对应的基准外观图案识别所述第三映射图像中存在的一个以上货物种类;
17.等级解析器件,与所述种类判断器件连接,用于获取与接收到的一个以上货物种类分别对应的一个以上运载危险等级,并将所述一个以上运载危险等级中数值最大的等级作为当前参考等级输出;
18.自适应控制器件,与所述等级解析器件连接,用于确定与所述当前参考等级正向关联的运载监控等级并实现对货车的各个监控部件的监控参数的相应设定;
19.信息提取机构,与所述种类判断器件连接,用于基于所述种类判断器件识别的每一货物种类在所述第三映射图像中占据的图像区域获取所述第三映射画面中所有货物种类占据的全部图像区域;
20.数据识别机构,与所述信息提取机构连接,用于基于所述全部图像区域在所述第三映射画面中占据的像素列的数量确定相应的参考货物宽度;
21.宽度判断机构,与所述数据识别机构连接,用于在确定的参考货物宽度大于等于所述货车的最大允许运载宽度时,发出超宽检测信号;
22.其中,确定与所述当前参考等级正向关联的运载监控等级并实现对货车的各个监控部件的监控参数的相应设定包括:运载监控等级越高,视频监控部件的帧率越高,安全应对部件的启动数量越多;
23.其中,基于所述全部图像区域在所述第三映射画面中占据的像素列的数量确定相应的参考货物宽度包括:所述全部图像区域在所述第三映射画面中占据的像素列的数量越多,确定的相应的参考货物宽度越宽。
24.本发明的货车运载场景识别系统运行智能、监控有效。由于能够针对货车混载货物的特殊场景自适应确定对应的运载监控等级,同时还集成了高精度的货物超宽检测机制,从而避免出现货物监控不力或者货物超宽运输的现象。
附图说明
25.以下将结合附图对本发明的实施方案进行描述,其中:
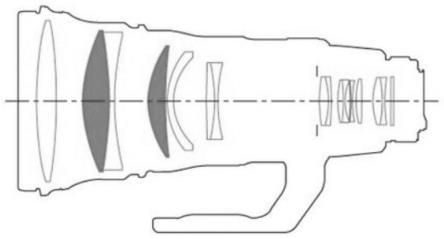
26.图1为根据本发明实施方案示出的货车运载场景识别系统的枪式采集机构的镜头结构示意图。
具体实施方式
27.下面将参照附图对本发明的货车运载场景识别系统的实施方案进行详细说明。
28.图像识别是人工智能的一个重要领域。为了编制模拟人类图像识别活动的计算机
程序,人们提出了不同的图像识别模型。例如模板匹配模型。这种模型认为,识别某个图像,必须在过去的经验中有这个图像的记忆模式,又叫模板。当前的刺激如果能与大脑中的模板相匹配,这个图像也就被识别了。例如有一个字母a,如果在脑中有个a模板,字母a的大小、方位、形状都与这个a模板完全一致,字母a就被识别了。这个模型简单明了,也容易得到实际应用。但这种模型强调图像必须与脑中的模板完全符合才能加以识别,而事实上人不仅能识别与脑中的模板完全一致的图像,也能识别与模板不完全一致的图像。例如,人们不仅能识别某一个具体的字母a,也能识别印刷体的、手写体的、方向不正、大小不同的各种字母a。同时,人能识别的图像是大量的,如果所识别的每一个图像在脑中都有一个相应的模板,也是不可能的。
29.当前,一辆货车可以承载的货物种类很多,经常遇到是货车承载的是多种不同种类货物混载的场景,在这种情况下,货车监控方无法确定应该使用哪一种力度的监控机制以实现实际运输场景需求的监控效果,同时,混载容易造成货物尺寸过宽,对货物的正常运载形成阻碍。
30.为了克服上述不足,本发明搭建了一种货车运载场景识别系统,能够有效解决相应的技术问题。
31.图1为根据本发明实施方案示出的货车运载场景识别系统的枪式采集机构的镜头结构示意图。
32.第一实施方案:
33.所述货车运载场景识别系统包括以下构件:
34.用户操控机构,设置在货车的驾驶室内的控制台上,用于在货车装载货物且未搭上雨布之前,在用户操作下,发送用于启动货物监控的触发指令;
35.枪式采集机构,设置在货车的驾驶室的顶棚的中央位置,与所述用户操控机构无线连接,用于在接收到所述用户操控机构发送的触发指令时,触发对所述驾驶室后方的运载车厢的图像采集操作,以获得对应的后方运载图像;
36.云端存储机构,设置在无线网络端,用于存储货车运载的各个种类货物分别对应的基准外观图案;
37.第一映射器件,设置在货车的驾驶室内的控制台内,与所述枪式采集机构无线连接,用于对接收到的后方运载图像执行几何校正处理,以获得对应的第一映射图像;
38.第二映射器件,设置在所述第一映射器件的左侧,与所述第一映射器件连接,用于对接收到的第一映射图像执行维纳滤波处理,以获得对应的第二映射图像;
39.第三映射器件,设置在所述第一映射器件的右侧,与所述第二映射器件连接,用于对接收到的第二映射图像执行应用指数变换的图像信号增强处理,以获得对应的第三映射图像;
40.种类判断器件,分别与所述云端存储机构和所述第三映射器件连接,用于基于货车运载的各个种类货物分别对应的基准外观图案识别所述第三映射图像中存在的一个以上货物种类;
41.等级解析器件,与所述种类判断器件连接,用于获取与接收到的一个以上货物种类分别对应的一个以上运载危险等级,并将所述一个以上运载危险等级中数值最大的等级作为当前参考等级输出;
42.自适应控制器件,与所述等级解析器件连接,用于确定与所述当前参考等级正向关联的运载监控等级并实现对货车的各个监控部件的监控参数的相应设定;
43.信息提取机构,与所述种类判断器件连接,用于基于所述种类判断器件识别的每一货物种类在所述第三映射图像中占据的图像区域获取所述第三映射画面中所有货物种类占据的全部图像区域;
44.数据识别机构,与所述信息提取机构连接,用于基于所述全部图像区域在所述第三映射画面中占据的像素列的数量确定相应的参考货物宽度;
45.宽度判断机构,与所述数据识别机构连接,用于在确定的参考货物宽度大于等于所述货车的最大允许运载宽度时,发出超宽检测信号;
46.其中,确定与所述当前参考等级正向关联的运载监控等级并实现对货车的各个监控部件的监控参数的相应设定包括:运载监控等级越高,视频监控部件的帧率越高,安全应对部件的启动数量越多;
47.其中,基于所述全部图像区域在所述第三映射画面中占据的像素列的数量确定相应的参考货物宽度包括:所述全部图像区域在所述第三映射画面中占据的像素列的数量越多,确定的相应的参考货物宽度越宽;
48.所述宽度判断机构还用于在确定的参考货物宽度小于所述货车的最大允许运载宽度时,发出宽度可靠信号;
49.基于所述种类判断器件识别的每一货物种类在所述第三映射图像中占据的图像区域获取所述第三映射画面中所有货物种类占据的全部图像区域包括:将所述种类判断器件识别的每一货物种类在所述第三映射图像中占据的图像区域进行去重式图像区域拼接处理,以获得获取所述第三映射画面中所有货物种类占据的全部图像区域;
50.设置在货车的驾驶室的顶棚的中央位置,与所述用户操控机构无线连接,用于在接收到所述用户操控机构发送的触发指令时,触发对所述驾驶室后方的运载车厢的图像采集操作,以获得对应的后方运载图像包括:所述枪式采集机构内置有第一无线接口,所述用户操控机构内置有第二无线接口;
51.设置在货车的驾驶室的顶棚的中央位置,与所述用户操控机构无线连接,用于在接收到所述用户操控机构发送的触发指令时,触发对所述驾驶室后方的运载车厢的图像采集操作,以获得对应的后方运载图像还包括:在所述第一无线接口和所述第二无线接口之间建立无线连接;
52.在所述第一无线接口和所述第二无线接口之间建立无线连接包括:所述第一无线接口和所述第二无线接口均为蓝牙通信接口。
53.第二实施方案:
54.所述货车运载场景识别系统包括以下构件:
55.用户操控机构,设置在货车的驾驶室内的控制台上,用于在货车装载货物且未搭上雨布之前,在用户操作下,发送用于启动货物监控的触发指令;
56.枪式采集机构,设置在货车的驾驶室的顶棚的中央位置,与所述用户操控机构无线连接,用于在接收到所述用户操控机构发送的触发指令时,触发对所述驾驶室后方的运载车厢的图像采集操作,以获得对应的后方运载图像;
57.云端存储机构,设置在无线网络端,用于存储货车运载的各个种类货物分别对应
的基准外观图案;
58.第一映射器件,设置在货车的驾驶室内的控制台内,与所述枪式采集机构无线连接,用于对接收到的后方运载图像执行几何校正处理,以获得对应的第一映射图像;
59.第二映射器件,设置在所述第一映射器件的左侧,与所述第一映射器件连接,用于对接收到的第一映射图像执行维纳滤波处理,以获得对应的第二映射图像;
60.第三映射器件,设置在所述第一映射器件的右侧,与所述第二映射器件连接,用于对接收到的第二映射图像执行应用指数变换的图像信号增强处理,以获得对应的第三映射图像;
61.种类判断器件,分别与所述云端存储机构和所述第三映射器件连接,用于基于货车运载的各个种类货物分别对应的基准外观图案识别所述第三映射图像中存在的一个以上货物种类;
62.等级解析器件,与所述种类判断器件连接,用于获取与接收到的一个以上货物种类分别对应的一个以上运载危险等级,并将所述一个以上运载危险等级中数值最大的等级作为当前参考等级输出;
63.自适应控制器件,与所述等级解析器件连接,用于确定与所述当前参考等级正向关联的运载监控等级并实现对货车的各个监控部件的监控参数的相应设定;
64.信息提取机构,与所述种类判断器件连接,用于基于所述种类判断器件识别的每一货物种类在所述第三映射图像中占据的图像区域获取所述第三映射画面中所有货物种类占据的全部图像区域;
65.数据识别机构,与所述信息提取机构连接,用于基于所述全部图像区域在所述第三映射画面中占据的像素列的数量确定相应的参考货物宽度;
66.宽度判断机构,与所述数据识别机构连接,用于在确定的参考货物宽度大于等于所述货车的最大允许运载宽度时,发出超宽检测信号;
67.其中,确定与所述当前参考等级正向关联的运载监控等级并实现对货车的各个监控部件的监控参数的相应设定包括:运载监控等级越高,视频监控部件的帧率越高,安全应对部件的启动数量越多;
68.其中,基于所述全部图像区域在所述第三映射画面中占据的像素列的数量确定相应的参考货物宽度包括:所述全部图像区域在所述第三映射画面中占据的像素列的数量越多,确定的相应的参考货物宽度越宽;
69.云端存储机构,设置在无线网络端,用于存储货车运载的各个种类货物分别对应的基准外观图案;
70.所述宽度判断机构还用于在确定的参考货物宽度小于所述货车的最大允许运载宽度时,发出宽度可靠信号;
71.基于所述种类判断器件识别的每一货物种类在所述第三映射图像中占据的图像区域获取所述第三映射画面中所有货物种类占据的全部图像区域包括:将所述种类判断器件识别的每一货物种类在所述第三映射图像中占据的图像区域进行去重式图像区域拼接处理,以获得获取所述第三映射画面中所有货物种类占据的全部图像区域;
72.设置在货车的驾驶室的顶棚的中央位置,与所述用户操控机构无线连接,用于在接收到所述用户操控机构发送的触发指令时,触发对所述驾驶室后方的运载车厢的图像采
集操作,以获得对应的后方运载图像包括:所述枪式采集机构内置有第一无线接口,所述用户操控机构内置有第二无线接口;
73.设置在货车的驾驶室的顶棚的中央位置,与所述用户操控机构无线连接,用于在接收到所述用户操控机构发送的触发指令时,触发对所述驾驶室后方的运载车厢的图像采集操作,以获得对应的后方运载图像还包括:在所述第一无线接口和所述第二无线接口之间建立无线连接;
74.在所述第一无线接口和所述第二无线接口之间建立无线连接包括:所述第一无线接口和所述第二无线接口均为蓝牙通信接口。
75.第三实施方案:
76.所述货车运载场景识别系统包括以下构件:
77.用户操控机构,设置在货车的驾驶室内的控制台上,用于在货车装载货物且未搭上雨布之前,在用户操作下,发送用于启动货物监控的触发指令;
78.枪式采集机构,设置在货车的驾驶室的顶棚的中央位置,与所述用户操控机构无线连接,用于在接收到所述用户操控机构发送的触发指令时,触发对所述驾驶室后方的运载车厢的图像采集操作,以获得对应的后方运载图像;
79.云端存储机构,设置在无线网络端,用于存储货车运载的各个种类货物分别对应的基准外观图案;
80.第一映射器件,设置在货车的驾驶室内的控制台内,与所述枪式采集机构无线连接,用于对接收到的后方运载图像执行几何校正处理,以获得对应的第一映射图像;
81.第二映射器件,设置在所述第一映射器件的左侧,与所述第一映射器件连接,用于对接收到的第一映射图像执行维纳滤波处理,以获得对应的第二映射图像;
82.第三映射器件,设置在所述第一映射器件的右侧,与所述第二映射器件连接,用于对接收到的第二映射图像执行应用指数变换的图像信号增强处理,以获得对应的第三映射图像;
83.种类判断器件,分别与所述云端存储机构和所述第三映射器件连接,用于基于货车运载的各个种类货物分别对应的基准外观图案识别所述第三映射图像中存在的一个以上货物种类;
84.等级解析器件,与所述种类判断器件连接,用于获取与接收到的一个以上货物种类分别对应的一个以上运载危险等级,并将所述一个以上运载危险等级中数值最大的等级作为当前参考等级输出;
85.自适应控制器件,与所述等级解析器件连接,用于确定与所述当前参考等级正向关联的运载监控等级并实现对货车的各个监控部件的监控参数的相应设定;
86.信息提取机构,与所述种类判断器件连接,用于基于所述种类判断器件识别的每一货物种类在所述第三映射图像中占据的图像区域获取所述第三映射画面中所有货物种类占据的全部图像区域;
87.数据识别机构,与所述信息提取机构连接,用于基于所述全部图像区域在所述第三映射画面中占据的像素列的数量确定相应的参考货物宽度;
88.宽度判断机构,与所述数据识别机构连接,用于在确定的参考货物宽度大于等于所述货车的最大允许运载宽度时,发出超宽检测信号;
89.其中,确定与所述当前参考等级正向关联的运载监控等级并实现对货车的各个监控部件的监控参数的相应设定包括:运载监控等级越高,视频监控部件的帧率越高,安全应对部件的启动数量越多;
90.其中,基于所述全部图像区域在所述第三映射画面中占据的像素列的数量确定相应的参考货物宽度包括:所述全部图像区域在所述第三映射画面中占据的像素列的数量越多,确定的相应的参考货物宽度越宽;
91.云端存储机构,设置在无线网络端,用于存储货车运载的各个种类货物分别对应的基准外观图案;
92.报警执行部件,设置在与所述货车的驾驶室内的控制台内,与所述宽度判断机构连接,用于在接收到所述超宽检测信号,执行相应的光电报警动作;
93.所述宽度判断机构还用于在确定的参考货物宽度小于所述货车的最大允许运载宽度时,发出宽度可靠信号;
94.基于所述种类判断器件识别的每一货物种类在所述第三映射图像中占据的图像区域获取所述第三映射画面中所有货物种类占据的全部图像区域包括:将所述种类判断器件识别的每一货物种类在所述第三映射图像中占据的图像区域进行去重式图像区域拼接处理,以获得获取所述第三映射画面中所有货物种类占据的全部图像区域;
95.设置在货车的驾驶室的顶棚的中央位置,与所述用户操控机构无线连接,用于在接收到所述用户操控机构发送的触发指令时,触发对所述驾驶室后方的运载车厢的图像采集操作,以获得对应的后方运载图像包括:所述枪式采集机构内置有第一无线接口,所述用户操控机构内置有第二无线接口;
96.设置在货车的驾驶室的顶棚的中央位置,与所述用户操控机构无线连接,用于在接收到所述用户操控机构发送的触发指令时,触发对所述驾驶室后方的运载车厢的图像采集操作,以获得对应的后方运载图像还包括:在所述第一无线接口和所述第二无线接口之间建立无线连接;
97.在所述第一无线接口和所述第二无线接口之间建立无线连接包括:所述第一无线接口和所述第二无线接口均为蓝牙通信接口。
98.另外,在所述货车运载场景识别系统中,基于货车运载的各个种类货物分别对应的基准外观图案识别所述第三映射图像中存在的一个以上货物种类包括:当所述第三映射图像中存在某一图像区域的边缘形状与某一基准外观图案的边缘形状匹配时,判断所述图像区域为所述第三映射图像中的所述基准外观图像对应的货物种类的单个货物占据的区域。
99.很显然本发明不局限于上述实施例,在不偏离本发明的范围和精神的条件下可以进行修改和改变。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。