1.本发明属于计算机技术应用领域,具体涉及一种基于图像的路网结构矢量拟合方法。
背景技术:
2.二值图像中目标结构的矢量化及矢量表示是一项重要的任务。在路网提取研究领域,现有大多数研究基于图像处理有关技术针对遥感数据进行处理,以二值图像的形式表示获取的道路网络结果。但是,由于数据的质量不一,提取的路段很有可能出现断裂的情况,另一方面,这类结果不利于便捷存储,路网结果不能进一步供相关工作者使用。随着社会现代化进程的加速,城市建设及道路规划使得路网的密集度不断增加,路网提取任务越来越困难,这对路网提取任务的后处理及便捷存储提出了新的要求。在这种场景下,路网矢量化是一个非常重要的步骤。矢量的路网表示通过点集数据连接而成,一定程度上对道路断裂现象进行了规避;此外,矢量路网可以更好地应用于gis存储。
3.ransac算法与线段拟合。二值图像可以模拟化为二维坐标系中不同数值点表示的平面集合,而ransac可以用于二维坐标系中散点集合的线段拟合。该算法利用最小二乘思想,迭代地从图像中选取一定数量的前景坐标点集合并拟合出最优的直线模型,达到对某一线段的矢量表示。此外,当前有研究者利用循环执行ransac算法的思想,对实际路网中的多条路段进行拟合,在每一个拟合结果产生之后在原图中对改路段相关的像素集合进行删除。然而,该循环ransac的思想缺少严谨的实践考量,主要在于针对单个拟合结果之后在原图中进行删除的方案存疑:
4.(1)由于诸如道路网络的目标结构本身是相互交叉连通的,如果在拟合一条线段之后根据连通区域的连通性质对已拟合的坐标点进行删除,则与该条线段相互交叉的其他线段也将被删除,这显然会导致大量的未拟合目标被错误处理而无法拟合;
5.(2)如果将删除条件改成仅仅“将拟合该线段的像素点集合从原图像中删除”,显然在具有一定宽度的目标结构中,已经拟合的线段所在方向及周围仍然会保留有大量的未拟合点,这将造成该目标线段可能会被拟合多次,而图像中的逐点扫描是一个相对耗时的过程,过多需要扫描的数据点对硬件需求也提出了挑战。
技术实现要素:
6.本发明的目的在于提供一种基于图像的路网结构矢量拟合方法,实现对目标的多尺度高效拟合。
7.针对现有技术中问题,本发明认为将稀疏的如单像素的目标骨架作为循环ransac的输入是一个有效的改善手段,因此结合数学形态学思想,对目标结构首先执行形态学预处理及骨架提取。目标骨架是目标架构的轻量表示,可以有效减少目标前景像素数量。并通过采取相关的优化策略,提出dl-ransac二值图像目标架构的矢量拟合算法,能够达到对目标的多尺度拟合效果。
8.本发明的目的在于提供一种基于图像的路网结构矢量拟合方法,基于ransac算法的原型,设计dl-ransac多尺度矢量拟合算法,用于二值图像目标结构的矢量拟合与便捷存储。
9.dl-ransac(double loop ransac,双循环ransac)算法,其中,拟合返回的结果包含三个部分:坐标点集、拟合直线的斜率k和偏置b,为了方便线段的表示和存储,本方面根据k和b进行简单计算,仅保留拟合坐标点集表示区间内的两个端点坐标,即线段line的数据结构如公式1所示。
10.line=[point
left
(x1,y1),point
right
(x2,y2)]
ꢀꢀꢀ
(1)
[0011]
对比于单一循环的ransac,dl-ransac的改进主要有两个方面:
[0012]
(1)增加对直于x轴线段的拟合步骤。单一的循环ransac可以拟合二值图像中的多条线段,然而,由于像素点的位置基于笛卡尔坐标系进行表示,ransac中的最小二乘拟合并不能拟合垂直于x轴的直线,这将导致部分有效路段的缺失。dl-ransac增加了对直于x轴直线的存在性判断,修复了单循环ransac的不足;
[0013]
(2)双循环的动态参数机制使得线段拟合的尺度多态化。ransac中有一个固定参数n为“满足拟合直线的最小像素点的个数”,如果这个参数设置过大,则较短的线段将无法拟合,如果设置过小,则容易拟合错误线段。因此本文在原始单循环ransac基础上嵌套一个外层循环并设置动态参数n:随着外层循环逐渐减小,但不会低于最小阈值。在这种情况下,较长的线段会被优先拟合,优先拟合的线段经过循环从原图中删除之后再拟合较短的线段,达到了路段多尺度拟合的目的。
[0014]
首先,在算法的输入方面,给定一个具有目标结构骨架的二值图像,并设定基准算法ransac的相关参数:直线拟合最小的像素点个数n,迭代次数k,及迭代过程中额外点与拟合直线间的距离阈值t。对于dl-ransac的双循环机制,需要设定两个动态阈值来控制外循环的终止边界:长线段像素点阈值及最短线段像素点阈值。算法的内循环执行ransac,每次拟合的线段集合保存之后,原图中相应的像素点会被删除,通过外循环的动态参数机制,以及最终原图中所剩余像素点数量不满足要求时,算法终止。算法最终输出拟合的线段集合,包含垂直于x轴的线段集合及非垂直于x轴的线段集合。
[0015]
具体地:
[0016]
dl-ransac算法的输入:具有道路骨架的二值图像image
data
;直线拟合的最小像素点个数n;内循环ransac的迭代次k;非拟合像素点与拟合直线的距离阈值t;满足目标拟合直线要求的最小像素点个数动态阈值n
minfit
,n
mingap
;
[0017]
dl-ransac算法的输出:非垂直于x轴的线段集合lines
novx
;垂直于x轴的线段集合lines
vx
;
[0018]
具体步骤如下:
[0019]
1、初始化image
data
并返回道路像素坐标集合p
xys
;声明p
original
=p
xys
;
[0020]
2、初始化输出集合lines
novx
和lines
vx
为空;
[0021]
3、初始化外循环迭代次数batch=1;
[0022]
4、
[0023]
5、n
minfit
=n
minfit
/batch;
[0024]
6、while lines
novx
有结果产生;
[0025]
7、从内循环ransac产生拟合模型ransac
model
和拟合模型的点集合ransac
fitdata
;
[0026]
8、从点集合ransac
fitdata
中获取端点生成拟合线段line
novx
;
[0027]
9、p
xys
=p
xys-ransac
fitdata
‘
[0028]
10、将line
novx
加入lines
novx
;
[0029]
11、end while;
[0030]
12、while lines
vx
有结果产生;
[0031]
13、从p
xys
中获得线段line
vx
;
[0032]
14、p
xys
=p
xys-line
vx
中的点集合;
[0033]
15、将line
novx
加入lines
novx
;
[0034]
16、end while;
[0035]
17、end while
[0036]
18、batch=batch 1。
附图说明
[0037]
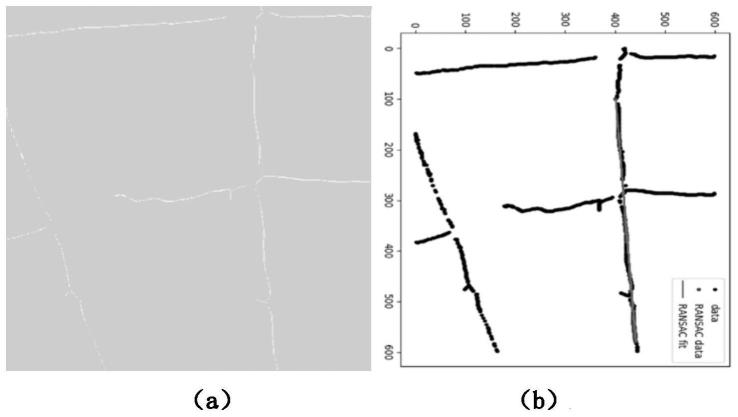
图1是本发明dl-ransac在600
×
600样例上的结果(1)。其中,(a)骨架输入、(b)单条线段拟合。
[0038]
图2是本发明dl-ransac在600
×
600样例上的结果(2)。其中,(a)删除拟合线段后的骨架,(b)多次拟合后的结果。
[0039]
图3是本发明dl-ransac矢量拟合在1000
×
1000的样例数据上的结果(1)。
[0040]
图4是本发明dl-ransac矢量拟合在1000
×
1000的样例数据上的结果(2)。
[0041]
图5是本发明dl-ransac矢量拟合在1000
×
1000的样例数据上的结果(3)。
具体实施方式
[0042]
dl-ransac参数设置。对于用于路网矢量拟合的dl-ransac算法,其相关参数设置如表1所示。
[0043]
表1dl-ransac参数设置
[0044]
参数名称参数设置ransacn2ransack500ransac
t
100minifitpoints125minigappoints50
[0045]
特别地,经过反复实验加以验证,设置随机生成直线的像素个数为2,这个值之所以较小,是因为经过骨架提取之后的道路由离散的单像素点构成,所以在某个相邻的区域,随机寻找拟合直线的密集像素集合的成功率较低,如果这个值较大(如5甚至10以上),内循环的单拟合ransac算法将无法尽可能多地匹配目标线段。此外,经过实验验证,设定随机次数k为500并且能够保证找到一条合适的拟合结果;非拟合点与拟合直线间的距离阈值t设定为100,在单条线段拟合之后该阈值范围内的点将从原图中删除;表现双循环ransac算法
特征的参数“满足要求的直线所需最小像素点个数”在算法1的外层循环从125动态递减,直到其小于最低阈值50。
[0046]
dl-ransac在600
×
600尺寸大小数据上的结果。为了验证dl-ransac拟合算法的可行性,本发明在实验中首先对一张尺寸为600
×
600的具有路网结构的数据进行测试。dl-ransac算法在测试数据上执行过程的结果如图1、图2所示。首先,输入为稀疏的单像素的道路骨架,随后dl-ransac中内循环的执行步骤对路网中的一条随机路段进行了拟合,并在源图像中删除了拟合路段相关的数据点集合。经过不断迭代这个过程,多条路段都拟合出了相应的线段结果。
[0047]
dl-ransac在1000
×
1000尺寸大小数据上的结果。本发明在实验中继续选取了三张尺寸为1000
×
1000的带有路网结构的数据,dl-ransac在其上的矢量路段拟合与重构结果分别如图3、图4、图5所示。从图中的结果中可以看到,每个结果的第一张子图体现了dl-ransac算法在路网中的拟合结果,多尺度的拟合基本能够覆盖所有路段,并补全了断裂的地方,效果良好。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。