技术特征:
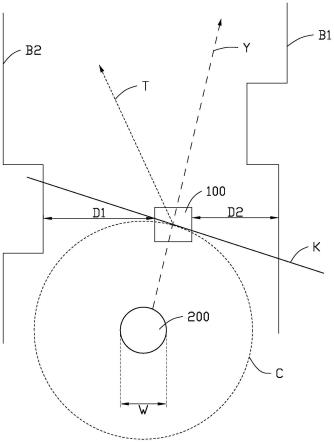
1.一种自动闪避方法,应用于沿规划轨迹自主移动的自主移动设备内;所述自动闪避方法包括:接收目标设备发出的闪避指令;获取所述目标设备的通行宽度以及所述自主移动设备所在区域的至少两个相对边界;计算所述自主移动设备的当前位置与所述边界之间垂直距离作为相对距离;判断是否提取到闪避距离;其中,所述闪避距离为大于所述通行宽度的所述相对距离;在提取到所述闪避距离时,根据所述闪避距离确定目标边界;控制所述自主移动设备执行闪避操作;其中,所述闪避操作为沿指定方向朝向所述目标边界移动并停留在所述目标边界。2.如权利要求1所述的自动闪避方法,其特征在于,在所述计算所述自主移动设备的当前位置与所述边界之间垂直距离作为相对距离的步骤之前,所述自动闪避方法还包括:获取所述自主移动设备的行进方向以及所述目标设备的移动方向;判断所述行进方向与所述移动方向是否重合;在所述行进方向与所述移动方向重合时,获取所述目标设备的移动速度作为第一速度,并获取所述自主移动设备的移动速度作为第二速度;判断所述第二速度是否小于所述第一速度;在所述第二速度大于等于所述第二速度时,控制所述自主移动设备沿所述行进方向移动;在所述行进方向与所述移动方向不重合或者所述第二速度小于所述第一速度时,计算所述自主移动设备的当前位置与所述边界之间垂直距离作为相对距离。3.如权利要求1所述的自动闪避方法,其特征在于,所述根据所述闪避距离确定目标边界的步骤包括:判断是否存在多个所述闪避距离;在存在多个所述闪避距离时,设定参考线;识别所述参考线与所述闪避距离对应的直线之间的夹角;选择所述夹角为正角度对应的所述闪避距离对应的边界为所述目标边界。4.如权利要求3所述的自动闪避方法,其特征在于,所述参考线为与所述自主移动设备和所述目标设备之间连接线相垂直的直线。5.如权利要求1所述的自动闪避方法,其特征在于,所述根据所述闪避距离确定目标边界的步骤包括:判断是否存在多个所述闪避距离;在存在多个所述闪避距离时,选择最短的所述闪避距离对应的边界为所述目标边界。6.如权利要求1所述的自动闪避方法,其特征在于,所述自主移动设备通过影像识别技术获取所述目标设备的通行宽度。7.如权利要求1所述的自动闪避方法,其特征在于,所述自动闪避方法还包括:所述闪避距离不存在时,控制所述自主移动设备沿所述目标设备的移动方向移动。8.如权利要求1所述的自动闪避方法,其特征在于,所述自动闪避方法还包括:在接收到停止指令时,控制所述自主移动设备停止执行闪避操作并沿规划轨迹自主移动。
9.如权利要求1至8中任意一项所述的自动闪避方法,其特征在于,所述自主移动设备将所述闪避指令通过广播的方式传输给位于预定范围内的其他所述自主移动设备。10.一种自主移动设备,其特征在于,所述自主移动设备沿规划轨迹自主移动;所述自主移动设备包括处理器和存储器,所述处理器用于执行所述存储器中存储的计算机程序时实现如权利要求1至9中任意一项所述的自动闪避方法。
技术总结
一种自动闪避方法以及自主移动设备,所述方法包括:接收目标设备发出的闪避指令;获取目标设备的通行宽度以及自主移动设备所在区域的至少两个相对边界;计算自主移动设备的当前位置与边界之间垂直距离作为相对距离;判断是否提取到闪避距离;闪避距离为大于通行宽度的相对距离;在提取到闪避距离时,根据闪避距离确定目标边界;控制自主移动设备执行闪避操作,沿指定方向朝向目标边界移动并停留在目标边界,以减少自主移动设备与其他设备碰撞可能,并提高自主移动设备的安全性。并提高自主移动设备的安全性。并提高自主移动设备的安全性。
技术研发人员:林忠亿
受保护的技术使用者:鸿海精密工业股份有限公司
技术研发日:2020.12.09
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。