1.本发明涉及工业过程控制系统的优化方法,属于控制工程领域。
背景技术:
2.复杂工业生产过程具有多变量、非线性与强耦合等特点,其优化控制一直是国内外学者讨论的热点问题。流程工业生产中产生大量的过程数据,过程变量间高度耦合,对一个或少数几个参数进行优化,仅能保证某一生产条件下的局部状态最优,只有从整体出发,对所有操作参数进行大范围的全局综合优化,才能保证生产过程的良好运行。
3.针对这种问题,一种基于操作模式的整体优化策略应运而生,不去讨论输入输出变量之间的耦合性,将生产工况转化为一种操作模式,采用该模式下最优的调节方式,从整体的角度优化整个过程,但在操作模式的定义上目前的一些研究成果均采用生产过程中的静态指标,没有考虑到变量变化的方向性和变化率。
技术实现要素:
4.本发明所要解决的技术问题:传统对于工业过程控制的模式优化仅仅针对稳态工况下的静态值进行建立,忽略了工况变化时变量变化的规律性,易导致优化操作方向与需求工况发生偏差。
5.为解决上述技术问题,本发明提供了一种基于参数区间变化趋势的动态操作模式优化方法,包括以下步骤:
6.s101:采集工业过程控制系统输入输出数据,根据时序数据进行动态操作模式的转化,建立动态操作模式空间;
7.s102:针对操作空间里的每个操作模式,根据设定的相似度阈值,将具有相似变化趋势的操作模式归于一类;
8.s103:在单一动态操作模式聚类中,根据评价指标最小原则,构建标准动态操作模式库;
9.s104:利用步骤s103所得的标准动态操作模式库,与实际运行过程中操作模式进行匹配,得到当前控制时刻k的标准调整模式作用于被控对象;
10.s105:以模式滑窗的形式将时间递进到k 1时刻,返回到步骤s104,重复步骤s104。
11.一种基于参数区间变化趋势的动态操作模式优化系统,包括以下功能模块:
12.动态操作模式空间模块:采集工业过程控制系统输入输出数据,根据时序数据进行动态操作模式的转化,建立动态操作模式空间;
13.归类模块:针对操作空间里的每个操作模式,根据设定的相似度阈值,将具有相似变化趋势的操作模式归于一类;
14.标准动态操作模式库构建模块:在单一动态操作模式聚类中,根据评价指标最小原则,构建标准动态操作模式库;
15.标准调整模式建立模块:利用标准动态操作模式库,与实际运行过程中操作模式进行匹配,得到当前控制时刻k的标准调整模式作用于被控对象;
16.循环模块:以模式滑窗的形式将时间递进到k 1时刻,返回到标准调整模式建立模块,重复标准调整模式建立模块的工作。
17.一种计算机可读存储介质,用于存储上述基于参数区间变化趋势的动态操作模式优化方法及系统。
18.本发明所达到的有益效果:本发明将给定参数历史数据的变化趋势指标定义为动态操作模式的各项组成元素,并且根据评价指标筛选出当前趋势下最优的操作模式建立标准动态操作模式库,通过匹配方法从库中检索出标准动态操作模式,以模式滑窗的方式实现优化控制的目的。另外,本发明能从数据中提取生产过程的趋势信息,有利于及时根据工况动态调整生产过程,实时给出最优的控制策略,优于传统静态操作模式优化方法。
附图说明
19.图1为常规莱文斯坦距离计算矩阵示意图;
20.图2为改进的莱文斯坦距离计算矩阵示意图;
21.图3为自下而上的层次凝聚聚类算法示意图;
22.图4为模式滑窗优化过程图;
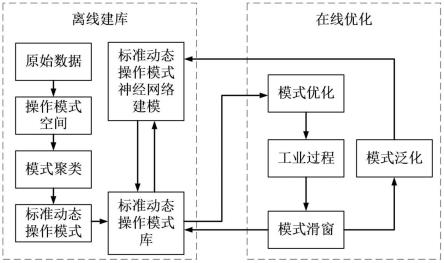
23.图5为整体优化框图;
24.图6为te过程反应流程图;
25.图7为te过程模式匹配图;
26.图8为反应器温度聚类结果树状图;
27.图9为阶跃扰动下反应器温度变化趋势图;
28.图10为阶跃扰动下反应器温度变化趋势对比图;
29.图11为正弦扰动下反应器温度变化趋势图;
30.图12为正弦扰动下反应器温度变化趋势对比图。
具体实施方式
31.下面对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
32.实施例1
33.一种基于参数区间变化趋势的动态操作模式优化方法,包括以下步骤:
34.s101:采集工业过程控制系统输入输出数据,根据时序数据进行动态操作模式的转化,建立动态操作模式空间;
35.s102:针对操作空间里的每个操作模式,根据设定的相似度阈值,将具有相似变化趋势的操作模式归于一类;
36.s103:在单一动态操作模式聚类中,根据评价指标最小原则,构建标准动态操作模式库;
37.s104:利用步骤s103所得的标准动态操作模式库,与实际运行过程中操作模式进行匹配,得到当前控制时刻k的标准调整模式作用于被控对象;
38.s105:以模式滑窗的形式将时间递进到k 1时刻,返回到步骤s104,重复步骤s104。
39.一种基于参数区间变化趋势的动态操作模式优化系统,包括以下功能模块:
40.动态操作模式空间模块:采集工业过程控制系统输入输出数据,根据时序数据进行动态操作模式的转化,建立动态操作模式空间;
41.归类模块:针对操作空间里的每个操作模式,根据设定的相似度阈值,将具有相似变化趋势的操作模式归于一类;
42.标准动态操作模式库构建模块:在单一动态操作模式聚类中,根据评价指标最小原则,构建标准动态操作模式库;
43.标准调整模式建立模块:利用标准动态操作模式库,与实际运行过程中操作模式进行匹配,得到当前控制时刻k的标准调整模式作用于被控对象;
44.循环模块:以模式滑窗的形式将时间递进到k 1时刻,返回到标准调整模式建立模块,重复标准调整模式建立模块的工作。
45.一种计算机可读存储介质,用于存储上述基于参数区间变化趋势的动态操作模式优化方法及系统。
46.所述步骤s101具体包括以下步骤:
47.动态操作模式记为m,包含三部分,分别为状态模式d、调整模式a和评价指标s,因在引入趋势信息的情况下结合时间区间的概念,故提出模式周期t,即从当前时刻(设为k)到前t个时刻(设为k-t 1)的时间长度;
48.状态模式为能够反映当前工业控制过程运行状态的变量,设为m个,在经过数据预处理之后,将m个变量在当前模式周期t内以7项趋势指标的方式进行描述,得到一个m
×
7的矩阵,7项趋势指标分别为均值、方差、趋势度、最大值、最大值点、最小值和最小值点,分别对应对应具体形式为:
[0049][0050]
各项指标的定义如下列表达式所示:
[0051][0052]
[0053][0054][0055][0056][0057][0058]
其中,代表所选取的状态参数xi在模式周期t内第t个时刻的数值,t
′
代表第t个时刻之后的任意一个时刻,即满足t
′
,在趋势度的计算中,共需要次的数值计算,其中c为数学概念中组合数的定义,e,f为任意整数且e>f,e!和f!为e和f的阶乘,计算公式如下:
[0059][0060]
median是其中个数值的中位数,ind代表索引数,范围在1到100之间;
[0061]
调整模式a的组成元素为所有变量中能够将整个工业控制过程投入稳定状态或者进入预想状态的一些关键变量,为工业控制过程中的操作变量mv,记为v,设为n个,其中包含在当前趋势指标之下对应的操作变量的数值,表示为:
[0062]
a=[v
1 v2ꢀ…ꢀ
vn]
t
[0063]
上标t表示转置矩阵;
[0064]
s为当前操作模式的评价指标,具体形式如下式所示:
[0065][0066]
其中,x
it
为当前状态模式中各变量的当前值,为各变量的期望值,αi为各变量的权重系数,且∑αi=1,m为所选取的状态模式变量数;
[0067]
由于状态模式和调整模式的维度的不同,动态操作模式的构成形式共有3种,空缺部分以0矩阵补充,如下式所示:
[0068][0069]
维度为max(m,n)
×
9;
[0070]
一个复杂的工业过程控制从一个稳态到达另一个稳态的过程中,变量必然会经历各种各样的变化,在变化中隐藏着各种变量之间复杂的耦合关系,不同的状态过渡过程利用本发明提供的动态操作模式的概念进行整理与分析,形成一种新型的操作模式空间q,表示为如下形式:
[0071]
q={m1,m2,
…
,m
p
,
…
}
[0072]
p为空间中模式数量,m
p
为第p个动态操作模式,维度为max(m,n)
×
9k。
[0073]
一种基于参数区间变化趋势的动态操作模式优化系统,包括以下功能模块:
[0074]
动态操作模式空间模块:采集工业过程控制系统输入输出数据,根据时序数据进行动态操作模式的转化,建立动态操作模式空间;
[0075]
归类模块:针对操作空间里的每个操作模式,根据设定的相似度阈值,将具有相似变化趋势的操作模式归于一类;
[0076]
标准动态操作模式库构建模块:在单一动态操作模式聚类中,根据评价指标最小原则,构建标准动态操作模式库;
[0077]
标准调整模式建立模块:利用标准动态操作模式库,与实际运行过程中操作模式进行匹配,得到当前控制时刻k的标准调整模式作用于被控对象;
[0078]
循环模块:以模式滑窗的形式将时间递进到k 1时刻,返回到标准调整模式建立模块,重复标准调整模式建立模块的工作。
[0079]
一种计算机可读存储介质,用于存储上述基于参数区间变化趋势的动态操作模式优化方法及系统。
[0080]
实施例2
[0081]
一种基于参数区间变化趋势的动态操作模式优化方法,包括以下步骤:
[0082]
s101:采集工业过程控制系统输入输出数据,根据时序数据进行动态操作模式的转化,建立动态操作模式空间;
[0083]
s102:针对操作空间里的每个操作模式,根据设定的相似度阈值,将具有相似变化趋势的操作模式归于一类;
[0084]
s103:在单一动态操作模式聚类中,根据评价指标最小原则,构建标准动态操作模式库;
[0085]
s104:利用步骤s103所得的标准动态操作模式库,与实际运行过程中操作模式进行匹配,得到当前控制时刻k的标准调整模式作用于被控对象;
[0086]
s105:以模式滑窗的形式将时间递进到k 1时刻,返回到步骤s104,重复步骤s104。
[0087]
在步骤s102中,具体包括以下步骤:
[0088]
s1021:常规莱文斯坦距离适用于一维数据的相似度匹配,如下式所示:
[0089][0090]
上式为常规莱文斯坦距离的计算递推公式,a和b分别代表两条字符串;a(i)指字符串a中第i个字母,b(j)指字符串b中第j个字母,lev
a,b
(i,j)为两个字符串中字母之间对应的莱文斯坦距离;以两个字符串a(bfcced)和b(bfced)为例,在相似度计算过程中,可将上式中两两字符串的莱文斯坦距离计算转化为矩阵形式,如图1所示,将字符串a和b置于7
×
8的矩阵中,并将字符串按从0开始给字符串的每个字母标号,接着从(3,3)(第3行第3列)利用上式的计算方法对每一个矩阵方格中数字的计算,步骤如下:
[0091]
若矩阵方格所对应上边的数字与左边的数字相同,则得左上方的数字。否则为左上方数字加1,记录为a;
[0092]
将矩阵方格对应左方数字加1,记录为b;
[0093]
将矩阵方格对应左方数字加1,记录为c;
[0094]
比较a,b,c的大小,取最小值。
[0095]
以(3,3)为例,a,b,c分别对应0,2,2。因此,(3,3)填入0。同理,之后每一个矩阵方格都将按照这3个计算步骤进行,直到计算至右下角最后一个空格,而右下角计算得出的数字1即两条字符串其中一条转化成另外一条所需最小的编辑次数,同时也作为两个字符串之间的莱文斯坦距离。
[0096]
由于动态操作模式的形式由一维向量转变为二维矩阵,因此两个动态操作模式的相似度计算矩阵也由二维平面拓展为三维空间,其中平面上为单一变量的7项趋势指标的比较,立体空间上以变量数为划分,如图2所示,根据以下数学递推公式得到每一个变量层面上的莱文斯坦距离,
[0097][0098]
最后将每一层的结果进行统一,得到两个动态操作模式的最终莱文斯坦距离,如下式所示:
[0099][0100]
式中,d为最终的相似度距离,s为基本进制数,k和l分别表示第k个、第l个操作模式,为两种状态模式的改进莱文斯坦距离,代表第k个操作模式的状态模式,为该状态模式中的第i个变量,代表第i个变量的第p个趋势指标,在不同的实验对象中,由于所选变量的类型与数量的关系,提出不同的相似度阈值dc;
[0101]
采用自下而上的层次凝聚聚类算法,根据设定的相似度阈值dc进行聚类,包括以下步骤:
[0102]
将大量离散数据以模式周期t为基本单元转化为动态操作模式的形式;
[0103]
将每个操作模式先定义为一个簇;
[0104]
计算两两之间簇的莱文斯坦距离,将距离最近的两个簇或者聚类进行合并,其中聚类间距离采用平均链形式,数学表达式如下式所示:
[0105][0106]
其中,代表两个分别隶属于ci,cj的动态操作模式的距离,|ci|和|cj|代表两个聚类或簇中的模式数量。
[0107]
重复簇或者聚类的合并步骤,直到满足设定的相似度阈值dc为止,其示意图如图3所示。
[0108]
步骤s103具体包括以下步骤:
[0109]
s1031:聚类中评价指标s最小的动态操作模式定义为标准动态操作模式ms,状态模式与调整模式分别为标准状态模式m
sd
和标准调整模式m
sa
,标准动态操作模式的集合称为标准动态操作模式库。
[0110]
步骤s104具体包括以下步骤:
[0111]
s1041:采集m个变量值xi(k)到前t个时刻的变量值xi(k-t 1),生成当前状态模式与标准动态状态模式m
sd
比较,得到标准动态调整模式m
sa
,施加于当前k时刻。
[0112]
步骤s105具体包括以下步骤:
[0113]
s1051:记录下当前时刻的变量值xi(k)到前t个时刻的变量值xi(k-t 1),形成m
×
t窗口大小的模式滑窗,待转化为状态模式md形式之后与标准动态操作模式库中的标准状态模式m
sd
进行改进莱文斯坦距离相似度对比,在当前k时刻采用最相似的标准调整模式m
sa
,完成一个模式窗口内的优化;
[0114]
s1052:模式滑窗向右移动,采集变量xi(k 1)到变量xi(k-t 1)的数值,继续与库中数据匹配,如图4所示。
[0115]
整体优化框图如图5所示。
[0116]
为验证本发明的效果,对本发明进行仿真验证。通过tf化工过程模型对本发明进
行仿真实验。
[0117]
模型过程主要包括:包含了5个基本的操作单元,如图6所示,分别是reactor(反应器)、stripper(汽提塔)、condenser(冷凝器)、compressor(循环压缩机),separator(气液分离器),共有12个操纵变量和41个测量变量。反应过程有8种组分,包括四种气体反应物a,c,d和e,两种液体产物g和h,一种惰性组分b(通过c的投料进入整个反应过程)和副产物f。
[0118]
由于tf过程变量种类多且耦合性复杂,因此选定了6个能反应整个过程运行工况的被控变量cv,分别为反应器温度,分离器温度,汽提塔温度,汽提塔出口流量,产物中g的含量和产物中h的含量,分别记为x1,x2,x3,x4,x5,x6。在模式转化过程中,以模式周期t为控制单元,将这6种变量的7项趋势指标作为操作模式的状态模式;选择7个操作变量mv作为操作模式的调整模式,分别为d流量,a流量,a/c混合流量,放空阀,分离器液体流量,汽提塔蒸汽阀和反应器冷凝水流量,均为控制投入速率的阀门开度,分别记为v1,v2,v3,v4,v5,v6,v7,因m<n,故具体形式如下:
[0119][0120]
本实验选用标准tf过程simulink仿真模型进行原始历史数据库的生成和后期的仿真测试,以仿真模型在400h内的变化数据作为历史数据库。从数据库中的原始数据转化为操作模式的过程十分漫长,如果模式滑窗每次仅仅移动一个采样值,历史数据将无一遗漏地全部转化,但同时也造成了较高的计算量。为了减少计算量,经实验测得,将移动窗口的步长调整为2,这样能保证在不影响数据库的聚类数量的基础上将转化时间缩短大约四分之一。
[0121]
假定100个采样点作为模式周期t,以t作为模式滑窗长度,步长为2,将选择的6个被控变量cv的数据转化为7个趋势指标作为状态模式7个操作变量mv的数值作为调整模式并根据当前值与期望值计算出s。根据第3节提出的基于改进的莱文斯坦距离的层次凝聚聚类算法,将历史数据库中的操作模式进行聚类。以任意两组操作模式举例说明,基本进制数s选定为0.001,如图7所示。
[0122]
[0123][0124][0125]
从反应器温度中挑选了20组典型数据为例,给出聚类结果如图8所示。根据实验测试可得,相似度阈值dc为2.6最为合适。
[0126]
从模式聚类的结果中选择出评价指标s最小的操作模式作为标准动态操作模式,构建标准操作模式库,为接下来的优化过程做准备。
[0127]
由于本发明所提出的控制理论在数据趋势的条件下,因此通过在正常工况下引入不同的干扰类型能够更加鲜明地体现出本发明理论的优越性,故以工业过程常见的阶跃扰动和周期性正弦扰动类型为例,给出本发明控制理论与pid控制以及传统静态操作模式控制之下相应的对比实验结果,验证本发明理论的可靠性和优越性。以反应器温度的实验变化过程为例。
[0128]
假定整个生产过程在第一个模式周期t内处于良好的生产工况下,在第一模式周期结束时刻引入单位阶跃扰动,如下式所示。
[0129][0130]
反应器温度的调整变化趋势如图9所示。
[0131]
可以看出,温度曲线出现一个明显的跳跃式上升。图9中三种不同线型的曲线代表着在三种控制方案下反应器温度的变化趋势,其中,虚线为传统pid控制,可以明显观察到,由于pid控制器设定值的原因,仍然稳定到与初始状态相同的温度;点线为静态操作模式,可以看出,静态操作模式与pid控制器具有相同的变化走势,且稳定到与动态操作模式下相同的温度;实线为本发明所提出的动态操作模式调节方式,模式滑动窗口大小为m
×
t,即6
×
100。可以看出,反应器温度以一种较为平缓的趋势没有稳定到与pid控制相同的数值,而是在122.6℃波动,取50到150时刻的模式定义为m1,数据趋势图如图10所示。
[0132]
图10中实线为模式滑窗在50-100时刻动态操作模式中针对反应器温度的状态模式,为:虚线为当前状态模式与标准动态操作模式库中的标准动态操作模式对比后距离最短的标准模式
[0133][0134][0135]
故采用标准的调整模式
[0136]
对当前k时刻整个过程进行优化。
[0137]
在引入正弦扰动的情况下三种调节方式均发生震荡型变化,如图11所示。在第一
个模式周期结束时刻引入外部正弦扰动结合tf化工过程与模式周期的共同参考,选定幅值a为1,角速度ω=0.02π,初相位为0。在引入正弦扰动的情况下三种调节方式均发生震荡型变化。
[0138]
经典pid控制如图11中虚线所示,反应器温度最终呈衰减震荡趋势贴近设定值稳定下来;传统静态操作模式控制方式如图中点线所示,与pid有相似的变化趋势,逐渐在原始状态周围波动;实线为动态操作模式调节方式,可以看出,与另外两种调节方式相比,变化趋势比较平缓,且仍然能稳定到初始状态。取150到250时刻的模式定义为m2,数据趋势图如图12所示。
[0139]
图12中实线为模式滑窗在150-250时刻的状态模式,为:
[0140][0141]
线为相似度最为接近的标准状态模式,为:
[0142][0143][0144]
随着过程进行产生下一时刻的各项状态变量的数值,继续上述优化步骤,给出k 1时刻的调整模式,不断优化下去。
[0145]
本领域内的技术人员应明白,本技术的实施例可提供为方法、系统、或计算机程序产品。因此,本技术可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本技术可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
[0146]
本技术是参照根据本技术实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0147]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0148]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0149]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。