1.本发明实施例涉及信息技术领域,尤其涉及一种基于数字图像处理的一维码图像区域识别方法、计算机可读存储介质和电子设备。
背景技术:
2.伴随着科学技术日益发展的今天,条形码已经成为了一种商品交易语言,市场上的商品都会通过不同类型的条形码对其进行标识。越来越发达完善的条形码技术,推动了电子商务的发展,提高了生产和经营效率。
3.随着计算机网络的快速发展和智能手机等设备的应用,通过对条形码进行拍照并利用网络,可以方面的了解商品的信息、辨别商品的真伪,而且还可以很快了解相关商品的信息。因此,这就需要通过运用图像处理和识别的相关方法来实现对条形码的定位和识读。通过采用图像处理方法,我们可以改善图像质量,减少或者消除噪声、光照不均、图像模糊等对条形码识别带来的影响,然后对条形码区域的实现自动定位,并进行条形码的识读和译码。
4.随着条形码的技术发展,并逐渐渗透到各个技术领域,因此,根据不同应用的需要,条形码的种类也越来越多,现在社会上流行的条形码主要分为两个大类:一维条形码和二维条形码。一维条形码是由一组规则排列的条、空以及对应的字符组成的标记,“条”是指条形码图像中黑色的直线。“空”是指条形码图像中白色的直线。这些条和空组合到一起来表示不同的信息,并能够通过一定的方法进行识别。通常对于每一种物品,它的编码是唯一的。对于一维条形码来说,需要通过数据库建立条码与物品信息的对应关系。一维条形码只是在水平方向表达信息,而在垂直方向则不表达任何信息,条形码的高度是便于终端设备进行解码。
5.针对条形码的定位方法已经有了不少研究,并提出了各种方法对条形码进行定位。比如基于dct变换的方法,利用图像纹理特性的方法,分块匹配的方法和应用数学形态学的方法,基于梯度算法等进行定位,但都各有其优点。现有技术方案中的优缺点如下:
6.1,基于差分的方法进行定位,此方法比较简单,适用于垂直和水平方向的条形码定位;而且此方法对于复杂背景下的定位鲁棒性并不是很好。
7.2,基于条形码边缘直线平行的原则进行定位:首先将图像分为 32*32的区域小块;然后对每个小块求取平行线的角度,把具有一定范围内的类似角度的小块组合在一起构成条形码区域,该方法主要是基于条形码垂直方向边缘线平行的特性,但是并不能保证每个区域小块中只包含条形码区域,因此会导致条形码不能完全提取。
8.3,基于离散余弦变换的方法进行快速定位方法,主要通过对图像进行dct变换,提取ac区域的值进行处理,然后使用形态学的方法进行平滑检测,最后利用提取出的区域特征进行条形码的定位。此方法相对比较简单。但是文章中用到的权重矩阵系数是固定的,故此方法不具有鲁棒性。
9.4,还有一些算法虽然比较简单,但其采用的是模板匹配算法,计算复杂度高,运算
量大,并且我们知道条形码可能会在图像中不同角度方向的放置情况,因此模板选取相对比较困难。
10.5,还有基于积分图像的方法,并通过对类似长方形的区域进行判定;但此方法需要一定的阈值,因此并不一定适用于任何环境。
技术实现要素:
11.本发明实施例提供了一种基于数字图像处理的一维码图像区域识别方法、计算机可读存储介质和电子设备,能够在不增加算法识别复杂度的情况下,提高一维码图像区域识别精确度。
12.本发明实施例的第一方面,提供了一种基于数字图像处理的一维码图像区域识别方法,其特征在于,包括:
13.获取待定识别的一维码图像,
14.基于预定方向划线的像素与第一像素阈值的大小,判断所述一维码图像在所述预定方向的边界;在预定方向的第一边界内,根据从预定方向的横切图像的像素对比分析,确定横切图像在所述预定方向上的纵坐标最大值与纵坐标值最小值的差值,为所述一维码图像的预定方向的第一尺寸;
15.在所述一维码图像沿着所述预定方向的边界内,将至少一行横切图像划分为多列,逐列分析所述至少一行横切图像中每列图像在横向坐标上对应的像素值,与第二像素阈值的大小,确定是否为有效的一维码图像,并判断所述一维码图像垂直于所述预定方向的横向边界,对所述横向边界内的横切图像的坐标分析,确定垂直于所述预定方向内的一维码图像的第二尺寸和中点坐标;
16.根据所述一维码的第一尺寸、第二尺寸、中点坐标,识别出所述一维码的图像区域。
17.可选地,所述预定方向为竖直方向和/或水平方向;基于所述竖直方向,对所述一维码图像,沿着竖直方向划线从而得到垂直于所述竖直方向的横切图像;基于所述水平方向,对所述一维码图像,沿着水平方向划线从而得到垂直于所述水平方向的横切图像。
18.进一步可选地,根据所述竖直方向和水平方向识别到的一维码个数,当所述竖直方向识别到的一维码个数大于0且所述水平方向识别到一维码个数为0时,确定所述一维码为横向放置;当所述水平方向识别到的一维码个数大于0且所述竖直方向识别到一维码个数为0时,确定所述一维码为纵向放置;当所述垂直方向识别到的一维码个数大于0且所述水平方向识别到一维码个数大于0时,确定所述一维码为倾斜放置。
19.可选地,所述逐列分析所述至少一行横切图像中每列图像在横向坐标上对应的像素值,与第二像素阈值的大小,确定是否为有效的一维码图像,并判断所述一维码图像垂直于所述预定方向的横向边界,还包括:根据阈值比较结果,判断相邻两个有效一维码图像之间的间隔距离,当间隔距离大于预定值时,确定相邻两个有效一维码图像分别为属于两个不同的一维码区域。
20.可选地,所述逐列分析所述至少一行横切图像中每列图像在横向坐标上对应的像素值,与第二像素阈值的大小,确定是否为有效的一维码图像,并判断所述一维码图像垂直于所述预定方向的横向边界,包括:在垂直于所述预定方向上,每间隔第一预定距离,确定
横切图像在当前列的像素值,并与第二像素阈值的大小比较,满足要求,就确定当前列为有效一维码图像,并对出现位于一维码区域的每列图像确定为有效一维码的个数进行计数,当一维码区域的有效一维条码的个数数值满足预定要求时,才确认当前横切图像为有效的一维码。
21.进一步可选地,当横切图像在当前列的像素值大于所述第二像素阈值时,判断为条空边界,第一个出现条空边界的地方就是一维码起始边界;所述划线计数值满足预定要求包括:从出现有一维码条到出现一维码之间空图像的边界计数值是偶数,从出现一维码之间空图像到出现有一维码条的计数值是奇数。
22.可选地,所述第一像素阈值、所述第二像素阈值设置成可改写参数。
23.可选地,所述方法中涉及的阈值参数通过硬件电路来配置。
24.根据本发明实施例的第二方面,提供了一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序指令,所述计算机程序指令被处理器执行时用于实现如第一方面任一项所述的基于数字图像处理的一维码图像区域识别方法。
25.根据本发明实施例的第三方面,提供了一种电子设备,其特征在于,包括:处理器和存储器;
26.所述存储器用于存放至少一个可执行指令,所述可执行指令使所述处理器执行如第一方面任一项所述的基于数字图像处理的一维码图像区域识别方法。
27.采用本发明实施例的基于数字图像处理的一维码图像区域识别的技术方案中,识别算法实现简单,而且横码纵码斜码情况都有考虑,比较全面;从而能够在不增加算法识别复杂度的情况下,提高一维码图像区域识别精确度。
附图说明
28.图1为本发明实施例提供的第一种一维码示意图。
29.图2为本发明实施例提供的第二种一维码示意图。
30.图3为本发明实施例提供的第三种一维码示意图。
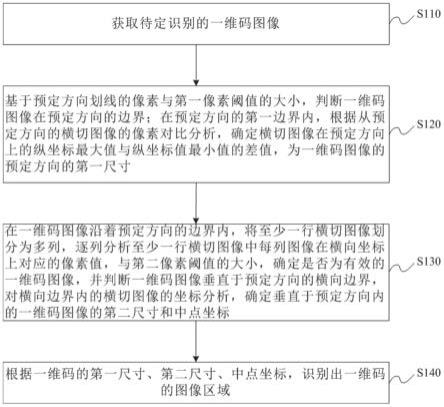
31.图4为本发明实施例提供一种基于数字图像处理的一维码图像区域识别方法的流程图。
32.图5为本发明实例例提供过一种一维码中横切图像及横切像素值对应的示意图。
33.图6为本发明实例例提供过一种一维码图像边界示意图。
34.图7为本发明实施例提供过另一种一维码中横切图像的示意图。
35.图8为本发明实施例提供另一种基于数字图像处理的一维码图像区域识别方法的流程图。
36.图9为本发明实施例提供的一种电子设备的结构示意图。
具体实施方式
37.下面结合附图(若干附图中相同的标号表示相同的元素)和实施例,对本发明实施例的具体实施方式作进一步详细说明。以下实施例用于说明本发明,但不用来限制本发明的范围。
38.本领域技术人员可以理解,本发明实施例中的“第一”、“第二”等术语仅用于区别
不同步骤、设备或模块等,既不代表任何特定技术含义,也不表示它们之间的必然逻辑顺序。
39.图1为本发明实施例提供的第一种一维码示意图,该一维码对应为横向放置的条码;图2为为本发明实施例提供的第二种一维码示意图,该一维码为纵向放置的条码;图3为本发明实施例提供的第三种一维码示意图,该一维码为倾斜放置的条码。
40.本发明实施例针对现有技术存在的技术方案中,不能完全对上述三种条码进行识别,计算复杂度高、运算量大,耗时等技术问题中至少技术问题,提供一种通过对图像进行横切,并对横切图像再逐列对比分析条形码图像上每个条的像素值,结合横切图像上下方向和左右方向的像素值大小对比结果,可以直接得到一维码的有效图像区域。并且还可以通过硬件电路来实现一维条码图像区域的识别,例如,提供一种通过寻找连续相邻像素对比度差值大于边界阈值的方案,来确定条码边界及定位一维码图像的硬件实现方案。
41.为了使本领域普通技术人员更容易理解本发明,下面对一维码相关的特征进行举例说明,但是本本领域普通技术人员应当理解,这些举例说明仅仅是为了便于本领域普通技术人员更容易理解本发明,而非对其进行限制:
42.一维码,指条码条和空的排列规则,常用的一维码的码制包括:ean 码、39码、交叉25码、upc码、128码、93码,isbn码,及codabar (库德巴码)等。
43.一维码的有效图像区域,可以是能够完整记录一个一维码的图像区域。
44.一维码图像,可以是需要待识别出其内部有效一维码的图像。有效一维码图像,可以是确定当前图像有一维码,而且需要待识别出其内部有效一维码的图像。
45.有效一维条码,是指识别一维码信息中,每个条、空对应的条码。
46.实施例
47.如图4所示,本实施例提供一种基于数字图像处理的一维码图像区域识别方法,该方法包括:
48.s110、获取待定识别的一维码图像,例如,通过摄像头、扫描仪等设备扫描需要识别的带有一维码图像的图像,或者从电子设备存储器中调取需要识别的带有一维码图像的图像。并根据用户需求解析出整个图像中,一维码图像的图像区域。
49.s120、基于预定方向划线的像素与第一像素阈值的大小,判断一维码图像在预定方向的边界;在预定方向的第一边界内,根据从预定方向的横切图像的像素对比分析,确定横切图像在预定方向上的纵坐标最大值与纵坐标值最小值的差值,为一维码图像的预定方向的第一尺寸。
50.s130、在一维码图像沿着预定方向的边界内,将至少一行横切图像划分为多列,逐列分析至少一行横切图像中每列图像在横向坐标上对应的像素值,与第二像素阈值的大小,确定是否为有效的一维码图像,并判断一维码图像垂直于预定方向的横向边界,对横向边界内的横切图像的坐标分析,确定垂直于预定方向内的一维码图像的第二尺寸和中点坐标。
51.s140、根据一维码的第一尺寸、第二尺寸、中点坐标,识别出一维码的图像区域。
52.可选地,预定方向为竖直方向和/或水平方向;基于竖直方向,对一维码图像,沿着竖直方向划线从而得到垂直于竖直方向的横切图像;基于水平方向,对一维码图像,沿着水平方向划线从而得到垂直于水平方向的横切图像。
53.其中,可以根据实际需求,给用户选择,是要对类似图1中横向放置的条码进行扫描识别;还是要对类似去2中纵向放置的条码进行扫描识别;然后分别基于竖直方向,对一维码图像,沿着竖直方向划线从而得到垂直于竖直方向的横切图像;或者基于水平方向,对一维码图像,沿着水平方向划线从而得到垂直于水平方向的横切图像。
54.当然也可以直接分别对两个方向的图像进行图像识别,然后根据两个方向的数据结果,自动识别出该一维码的放置方向。还可以根据扫描结果,识别出一维码放置倾斜时,对一维码图像的边缘数据除噪处理,以便得到更准确的图像识别结果。例如,根据竖直方向和水平方向识别到的一维码个数,当竖直方向识别到的一维码个数大于0且水平方向识别到一维码个数为0时,确定一维码为横向放置;当水平方向识别到的一维码个数大于0且竖直方向识别到一维码个数为0时,确定一维码为纵向放置;当垂直方向识别到的一维码个数大于0且水平方向识别到一维码个数大于0时,确定一维码为倾斜放置。
55.具体地,如图5所示,以横向放置的一维码为例。abcd四个点是一个一维码图像的四个点,三条横向切线为l1、l2、l3。当横向划线横切图像的时候,比如切线从cd向ab移动,会出现l1、l2、l3三种代表性的切线:
56.l1:代表没有切到一维码;
57.l2:代表刚好切到一维码;
58.l3:代表切过一维码。
59.首先,对一维码的条空边界进行判断:
60.如图5建立坐标,其中横轴为图像横向像素位置的横坐标;纵坐标代表像素值,范围0~255(0代表纯黑色,255代表纯白色,在一维码中,黑色代表“条”,白色代表“空”)。
61.根据图5所示,可以看出,横向三条切线中的l2位置横切部分的像素值如坐标中的下方虚线所示,切线的浅色部分像素值很高,接近255;深色部分像素值很低,接近0(仅示意图,像素值并不准确)。所以在临界“条”和“空”的位置,横向相邻两个像素点的差值的绝对值是很大的,这里的很大需要有个比较的基准,就是阈值,这里命名为“像素差值阈值”。所以大于这个阈值的就可以判断为条空边界。
62.第一个出现条空边界的地方就是一维码起始边界。
63.然后,对边界计数:
64.出现边界的时候通过计数器计数(edge_num),当这个计数值大于某个值(exit_thvalue)的时候,认为是存在一维码。这样做一是为了防止图像干扰;二是一维码的条数(或者说位数)是有要求的(一般是大于13bit的),所以如果边界个数太少可以认为是干扰,不算一维码。
65.所以可选地,逐列分析至少一行横切图像中每列图像在横向坐标上对应的像素值,与第二像素阈值的大小,确定是否为有效的一维码图像,并判断一维码图像垂直于预定方向的横向边界,包括:在垂直于预定方向上,每间隔第一预定距离,确定横切图像在当前列的像素值,并与第二像素阈值的大小比较,满足要求,就确定当前列为有效一维码图像,并对出现位于一维码区域的每列图像确定为有效一维条码的个数进行计数,当一维码区域的有效一维条码的个数数值满足预定要求时,才确认当前横切图像为有效的一维码。
66.另外,计数器还有个规律:从“条”到“空”的边界计数值都是偶数的;空到条的计数值都是奇数的。
67.所以进一步可选地,当横切图像在当前列的像素值大于第二像素阈值时,判断为条空边界,第一个出现条空边界的地方就是一维码起始边界;划线计数值满足预定要求包括:从出现有一维码条到出现一维码之间空图像的边界计数值是偶数,从出现一维码之间空图像到出现有一维码条的计数值是奇数。
68.如图6所示,在一维码区域截止边界计算中,需要注意的是:一维码相邻边界不能相隔太大,比如图6,中间相隔太大也不符合一维码规范,一般是宽窄比为2:1或者3:1,也就是说最大宽度不超过3倍的窄条宽度。所以要有一个数值对此进行约束,就是相邻边界距离阈值。所以根据这个阈值,如果下一个条空边界相距超过阈值,则可判断为一维码的另一个边界。
69.所以可选地,逐列分析至少一行横切图像中每列图像在横向坐标上对应的像素值,与第二像素阈值的大小,确定是否为有效的一维码图像,并判断一维码图像垂直于预定方向的横向边界,还包括:根据阈值比较结果,判断相邻两个有效一维码图像之间的间隔距离,当间隔距离大于预定值时,确定相邻两个有效一维码图像分别为属于两个不同的一维码图像。
70.关于一维码区域高度,如图5和图4提供对应的技术方案中,如果从上至下横切图像,满足一维码特征的所有横切线中的最大最小的纵坐标差值即为一维码区域高度。
71.关于一维码中点,如图5和图4提供对应的技术方案中,可以得到一维码区域横切线的起始坐标和终止坐标,所以可以计算得到每个横切线的中点坐标(heng_x,heng_y)。
72.但是如图所示,每个横切线的中点坐标不一定在一条竖线上,因为有一维码图像角度等问题,所以需要利用每条横切线中点坐标及个数计算一维码图像的实际中点坐标(pox_one,poy_one)。
73.最后是一维码区域定位:
74.根据上面的处理得到一维码中点坐标及一维码宽度和高度,就可以确定一维码区域的范围。需要说明的是,在这些处理的过程中,涉及一些容差及阈值在具体实现过程中都是用寄存器实现,而且为了这些参数可以修改,比如图7中,l5到l8区域可能都是满足一维码条件的区域,但是计算中点的时候,去掉了上下两侧边缘部分的数值,仅用l6到l7 的坐标参与计算。
75.所以可选地,第一像素阈值、第二像素阈值设置成可改写参数。而且上述方法中涉及的阈值参数通过硬件电路来配置。当然不限于阈值参数,其他的参数也可以通过硬件电路来配置。
76.当然在一维码区域定位之后,可以根据前面的一维码中每个条的区域像素值自动确定条码对应的参数值。也可以根据需求,在利用其他计算工具,来计算一维码区域的参数值。
77.另外,也可以根据根据实际需求,在一维码区域定位之后,将一维码区域的图像截取出来,进行存档备份,或者与其他文件、数据关联绑定存储。
78.关于硬件电路的配置方式,一种可选择的实施方式如下:
79.具体实现电路:
80.电路实现过程用到的一些参数设置:
81.ram单元:heng_x,heng_y,pox_one,poy_one。
82.寄存器设置的值:
83.1,像素差值阈值:pix_thvalue;
84.2,相邻边界距离阈值:dis_th;
85.3,满足小于dis_th的个数的阈值:thre_num;
86.4,认为存在一维码时需要满足dot_x_number的个数:exit_thvalue;
87.运算过程用到的量:
88.1,一维码中的黑色条的边界个数计数值:edge_num;
89.2,超过thre_num的个数:dot_x_number;
90.3,起始条码边界位置:sum_dis;
91.4,保存每个dot_x_number所对应的行数:heng_y;
92.5,保存每个dot_x_number所对应的列中心位置:heng_x;
93.6,疑似一维码区域的个数:num_dot_x。
94.电路实现过程说明:
95.4-2-1,一维码在图像中的位置可以分为三种情况:横向、纵向、倾斜。
96.4-2-2,首先讨论横向放置情况,
97.a)假设图像有depth行width列;
98.具体的识别方法,如图8所示,包括:
99.b)轮询i行j列,读取对应j列及j 1列像素值,当这两列像素值的差值大于pix_thvalue时,认为出现条码边界,则列数j记为heng_dot_x。若此时边界计数值edge_num为奇数则dot_x_1=j,若为偶数则dot_x_0=j;然后edge_num加1;
100.c)如果edge_num》1,或者j为width-2时,
101.取dis_01=abs(dot_x_0-dot_x_1),如果dis_01《dit_th成立,则判断 heng_number是否为0,
102.如果为0则将heng_dot_x存入start_x中,heng_number自加1,;如果不为0,则heng_number直接自加1。如果dis_01《dit_th不成立,则继续判断heng_number》thre_num是否成立,如果成立则执行:
103.heng_x[dot_x_number]=(sum_dis heng_dot_x)/2; heng_y[dot_x_number]=i;dot_x_number ;如果不成立则执行: dot_x_0=0;dot_x_1=0;heng_number=0;heng_dot_x=0;edge_num=0;
[0104]
d)如果edge_num=1,则将heng_dot_x值保存在sum_dis中;
[0105]
e)否则继续判断i和j是否在范围内,在的话继续轮询,已到最大值则结束轮询,图像轮询完毕;得到dot_x_number、heng_x[i]、heng_y[i] 的值。
[0106]
f)当轮询完图像后,如果dot_x_number》exit_thvalue,则进行g),否则直接结束此轮;
[0107]
g)为降低干扰,舍去dot_x_number最始和最末的k个数据。i=k开始依次取k《i《dot_x_number-k,j=k 1开始依次取到 i 1《j《dot_x_number-k 1,求和heng_x[j]:sum_x =heng_x[j];求和 heng_y[j]:sum_y =heng_y[j];每次求和累加sum_num_x自加1。当累加到j==dot_x_number-k且sum_num_x》30的时候,运算 sum_x/sum_num_x的值然后存入到存储器pox_one[num_dot_x]中;同样 sum_y/sum_num_x存入到存储器poy_one[num_dot_
y]中。跳出循环, num_dot_x自加1。
[0108]
需要说明的是,上述参数配置中,纵向放置的情况和横向放置类比,只是颠倒xy,得到num_dot_y、pox_one_y[i]、poy_one_y[i]。
[0109]
另外,根据num_dot_x和num_dot_y的值有三种情况:
[0110]
1)num_dot_x》0&num_dot_y=0:说明一维码横向放置,根据 dot_x_number的最小值和最大值对应的坐标得到一维码位置;
[0111]
2)num_dot_x=0&num_dot_y》0:说明一维码纵向放置,根据 dot_y_number的最小值和最大值对应的坐标得到一维码位置;
[0112]
3)num_dot_x》0&num_dot_y》0:说明一维码倾斜放置,根据 dot_x_number的最小值和最大值和dot_y_number的最小值和最大值对应中的极值坐标得到一维码位置。
[0113]
因此,采用本实施例提供的上述技术方案中,硬件电路实现比软件算法更快速;而且协议选择灵活配置,适用性强;实现简单,横码纵码斜码情况都有考虑,比较全面;并且通过dma、计算单元、ram存储等硬件实现不占用软件资源。
[0114]
本实施例还提供了一种电子设备,其特征在于,包括:处理器和存储器;
[0115]
存储器用于存放至少一个可执行指令,可执行指令使处理器执行如第一方面任一项的基于数字图像处理的一维码图像区域识别方法。
[0116]
根据本实施例的另一方面,提供了一种计算机可读存储介质,其特征在于,计算机可读存储介质存储有计算机程序指令,计算机程序指令被处理器执行时用于实现如第一方面任一项的基于数字图像处理的一维码图像区域识别方法。
[0117]
如图9所示,电子设备900可以包括存储器和处理器。具体地,电子设备900包括一个或多个处理器、通信元件等,所述一个或多个处理器例如:一个或多个中央处理单元(cpu)901,和/或一个或多个业务处理器(gpu)913等,处理器可以根据存储在只读存储器(rom)902 中的可执行指令或者从存储部分908加载到随机访问存储器(ram)903 中的可执行指令而执行各种适当的动作和处理。通信元件包括通信组件 912和/或通信接口909。其中,通信组件912可包括但不限于网卡,所述网卡可包括但不限于ib(infiniband)网卡,通信接口909包括诸如 lan卡、调制解调器等的网络接口卡的通信接口,通信接口909经由诸如因特网的网络执行通信处理。
[0118]
处理器可与只读存储器902和/或随机访问存储器903中通信以执行可执行指令,通过通信总线904与通信组件912相连、并经通信组件912 与其他目标设备通信,从而完成本发明实施例提供的任一项一维码识别方法对应的操作。
[0119]
此外,在ram 903中,还可存储有装置操作所需的各种程序和数据。 cpu 901或gpu 913、rom 902以及ram 903通过通信总线904彼此相连。在有ram 903的情况下,rom 902为可选模块。ram 903存储可执行指令,或在运行时向rom 902中写入可执行指令,可执行指令使处理器执行上述通信方法对应的操作。输入/输出(i/o)接口905也连接至通信总线904。通信组件912可以集成设置,也可以设置为具有多个子模块(例如多个ib网卡),并在通信总线链接上。
[0120]
以下部件连接至i/o接口905:包括键盘、鼠标等的输入部分906;包括诸如阴极射线管(crt)、液晶显示器(lcd)等以及扬声器等的输出部分907;包括硬盘等的存储部分908;以及包括诸如lan卡、调制解调器等的网络接口卡的通信接口909。驱动器910也根据需要连
接至i/o接口905。可拆卸介质911,诸如磁盘、光盘、磁光盘、半导体存储器等等,根据需要安装在驱动器910上,以便于从其上读出的计算机程序根据需要被安装入存储部分908。
[0121]
需要说明的,如图9所示的架构仅为一种可选实现方式,在具体实践过程中,可根据实际需要对上述图9的部件数量和类型进行选择、删减、增加或替换;在不同功能部件设置上,也可采用分离设置或集成设置等实现方式,例如gpu和cpu可分离设置或者可将gpu集成在cpu 上,通信元件可分离设置,也可集成设置在cpu或gpu上,等等。这些可替换的实施方式均落入本发明的保护范围。
[0122]
本发明实施例的电子设备可以用于实现上述实施例中相应的一维码识别方法,该电子设备中的各个器件可以用于执行上述方法实施例中的各个步骤,例如,上文中描述的一维码识别方法可以通过电子设备的处理器调用存储器存储的相关指令来实现,为了简洁,在此不再赘述。
[0123]
采用本发明实施例的基于数字图像处理的一维码图像区域识别的技术方案中,识别算法实现简单,而且横码纵码斜码情况都有考虑,比较全面;从而能够在不增加算法识别复杂度的情况下,提高一维码图像区域识别精确度。
[0124]
根据本发明实施例,上文参考流程图描述的过程可以被实现为一种计算机程序产品。例如,本发明实施例包括一种计算机程序产品,其包括有形地包含在机器可读介质上的计算机程序,计算机程序包含用于执行流程图所示的方法的程序代码,程序代码可包括对应执行本发明实施例提供的方法步骤对应的指令,例如,用于接收用户的认证语音数据的指令;用于根据所述认证语音数据,对所述用户进行与当前涉及的业务操作相应的认证安全级别的声纹身份认证,确定身份认证结果的指令;用于根据指示认证通过的身份认证结果,执行所述用户的所述业务操作的指令。在这样的实施例中,该计算机程序可以通过通信元件从网络上被下载和安装,和/或从可拆卸介质911被安装。在该计算机程序被处理器执行时,执行本发明实施例的方法中公开的功能。
[0125]
可能以许多方式来实现本发明的方法和装置、电子设备和存储介质。例如,可通过软件、硬件、固件或者软件、硬件、固件的任何组合来实现本发明实施例的方法和装置、电子设备和存储介质。用于方法的步骤的上述顺序仅是为了进行说明,本发明实施例的方法的步骤不限于以上具体描述的顺序,除非以其它方式特别说明。此外,在一些实施例中,还可将本发明实施为记录在记录介质中的程序,这些程序包括用于实现根据本发明实施例的方法的机器可读指令。因而,本发明还覆盖存储用于执行根据本发明实施例的方法的程序的记录介质。
[0126]
本发明实施例的描述是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式,很多修改和变化对于本领域的普通技术人员而言是显然的。选择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。