1.本发明涉及一种永磁同步电机电流解耦及谐波抑制的方法,属于永磁同步电机技术领域。
背景技术:
2.永磁同步电动机(permanent magnet synchronous motor,pmsm)具有体积小、效率高、功率密度高等优点,且随着永磁同步电机及其驱动技术的发展,新能源汽车及城市轨道交通领域都在推广永磁同步电机作为传动装置。其在新能源汽车及城市轨道交通列车上有着极为广阔的前景。针对d-q轴电流耦合情况,通常基于前馈型的电压解耦单元,其原理是根据定子电压方程的旋转电压添加电压解耦单元,由d-q轴电流环的pi调节器得到的d-q轴电压给定,再经过电压解耦处理后得到真正的d-q轴电压给定,显然pi调节器和电压解耦处理无疑增加了控制结构。针对d-q轴电流谐波问题,近年来有学者提出了谐波电压补偿、重复控制、比列谐振控制、自适应控制、死区时间补偿等的电流谐波抑制策略,这些策略是以提取相电流中某一频次的电流谐波特征量为目标,而后将电流谐波特征量生成谐波电压,从而补偿至原有的d-q轴给定电压中。即这些策略都是依托于原有的d-q轴电流环中的pi控制输出的d-q轴给定值,显然这些策略的控制结构相对复杂,原有的d-q轴电流环存在耦合项,同时也只能抑制特定频次的电流谐波。
技术实现要素:
3.为了克服现有技术的不足,本发明提供了一种永磁同步电机电流解耦及谐波抑制的方法,以实现电流解耦控制及谐波的抑制。
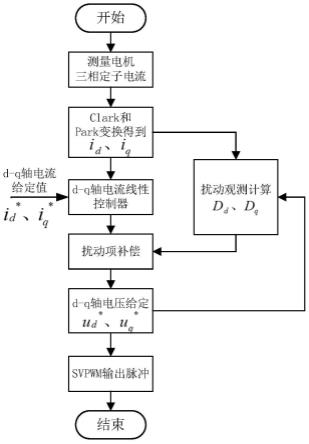
4.本发明的技术方案:本发明一种永磁同步电机电流解耦及谐波抑制的方法,其方法包括以下步骤:步骤一、实时测量永磁同步电机的三相定子电流数据,所述三相定子电流数据经过clark和park变换得到d-q轴的电流实际值,所述d-q轴的电流实际值经过线性控制器的输出包含d-q轴的电流的原始耦合项和扰动项之和;步骤二、设置扰动观测器模块,所述扰动观测器模块接受所述d-q轴的电流实际值,且接受步骤四的d-q轴的电压给定值,并通过所述扰动观测器模块提取d-q轴的电流的新耦合项和扰动项之和;步骤三、将d-q轴的电流给定值与所述d-q轴的电流实际值误差经过所述线性控制器调节;步骤四、将所述d-q轴的电流的新耦合项和扰动项之和分别补偿至所述线性控制器的输出进行扰动项补偿,从而获得d-q轴的电压给定值;步骤五、将所述d-q轴的电压给定值通过svpwm调制技术生成pwm波形,从而驱动电
机。
5.进一步地,在步骤二中,通过所述扰动观测器模块提取d-q轴的电流的新耦合项和扰动项之和,具体为:首先根据永磁同步电机的数学模型,建立永磁同步电机d-q轴的电压方程:其中,id和iq分别为d-q轴电流;rs为定子电阻,ld和lq分别为d-q轴电感;ud和uq分别为d-q轴电压;ψr为永磁体磁连;ωe为电角速度;d1和d2分别为d-q轴电压的未知扰动项;将式(1)整理成式(2):其中,和为d-q轴电流的微分;进一步写成式(3)其中,为状态矢量,为输入矢量,为耦合项,为扰动项,为扰动项,为系数矩阵,为了实现电流的解耦和扰动项的抑制,将式(3)写成式(4)其中d=ax c-d,令即d为d-q轴电流的耦合项和扰动项之和,dd为d轴电流的耦合项和扰动项之和,dq为q轴电流的耦合项和扰动项之和。
6.进一步地,在步骤三中,所述d-q轴的电流给定值分别为:d轴的电流给定值i
d*
是0,q轴的电流给定值i
q*
是速度pi控制器的输出。
7.进一步地,在步骤四中,将式(4)写成式(5)
在实际工程应用中,系统是离散化的,有采样周期,因此可以有:其中,x
*
为给定值,x为实际值;将式(11)写成式(12):根据式(10)则可以得到:可知,dd和dq包含了d-q轴的电流的耦合项。有益效果
8.(1)本发明根据永磁同步电机的d-q轴电压方程,能较好的观测出d-q轴电流的耦合项和扰动项之和,从而实现电流的解耦和谐波抑制;(2)本发明利用扰动观测器可以实时观测系统的耦合项和扰动项,将其直接补偿电压输出,无需对电机参数的变化进行准确辨识,简化系统设计;(3)本发明利用扰动观测器观测系统的耦合项和扰动项,可以无需对d-q轴电流进行pi调节,减少控制系统的结构,同时也抑制了三相电流谐波;(4)本发明所提供的扰动观测器方法简单易实现,减少传统方法的计算量,缩短计算时间。
附图说明
9.图1为本发明一种永磁同步电机电流解耦及谐波抑制的方法的流程图;图2为d-q轴电流扰动观测器控制框图;图3为基于扰动观测器的d-q轴电流控制系统拓扑图;图4为传统pi调节器下的a相电流波形及其频谱;图5为本发明方法下的a相电流波形及其频谱。
具体实施方式
10.下面结合附图和实施例对本技术作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关发明,而非对该发明的限定。另外还需要说明的是,为了
便于描述,附图中仅示出了与有关发明相关的部分。需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
11.本发明一种永磁同步电机电流解耦及谐波抑制的方法的扰动观测器提取d-q轴电流环的耦合项和扰动项,如图1所示,是通过以下技术方案实现的:步骤一、实时测量永磁同步电机的三相定子电流数据,所述三相定子电流数据经过clark和park变换得到d-q轴的电流实际值,所述d-q轴的电流实际值经过线性控制器的输出包含d-q轴的电流的原始耦合项和扰动项之和;在实际应用中,通过采集永磁同步电机定子三相电流经过clark和park变换可以得到d-q轴电流id和iq分别,同时通过速度传感器获得电角速度ωe。
12.步骤二、设置扰动观测器模块,所述扰动观测器模块接受所述d-q轴的电流实际值,且接受步骤四的d-q轴的电压给定值,并通过所述扰动观测器模块提取d-q轴的电流的新耦合项和扰动项之和。
13.具体为:首先根据永磁同步电机的数学模型,建立永磁同步电机d-q轴的电压方程:其中,id和iq分别为d-q轴电流;rs为定子电阻,ld和lq分别为d-q轴电感;ud和uq分别为d-q轴电压;ψr为永磁体磁连;ωe为电角速度;d1和d2分别为d-q轴电压的未知扰动项;将式(1)整理成式(2):其中,和为d-q轴电流的微分。
14.进一步写成式(3)其中,为状态矢量,为输入矢量,
为耦合项,为扰动项,为系数矩阵,为了实现电流的解耦和扰动项的抑制,将式(3)写成式(4)其中d=ax c-d,令即d为d-q轴的电流的耦合项和扰动项之和,dd为d轴的电流的耦合项和扰动项之和,dq为q轴的电流的耦合项和扰动项之和。
15.可见,扰动观测器模块接受所述永磁同步电机的输出的d-q轴的电流信号;从所述永磁同步电机控制系统中获取d-q轴的电压给定信号;以及基于所述永磁同步电机的对象模型来计算所述永磁同步电机控制系统的扰动估计。
16.根据式(4),可以通过构建扰动观测器分别提取d-q轴的电流的新耦合项和扰动项之和。
17.构建扰动观测器的方法具体为:由式(4)可得式(5):当d的变化率满足扰动估计误差e表示为:其中,为扰动估计值。
18.由于扰动的估计值和真实值非常接近,因此扰动观测器可以构造为:其中,k为扰动观测器的增益系数。
19.将式(7)调整成式(8):为简化运算,令则式(8)表示为:式(9)为本发明的扰动观测器提取新的耦合项和扰动项的公式,可根据式(9)构建本发明设计的d-q轴电流环的扰动观测器,如图2所示,为d-q轴电流环的扰动观测器控制框
图。d-q轴的电压给定值u
d*
和u
q*
可以通过图3所示的控制系统得到。id、iq、u
d*
和u
q*
经过图2所示的扰动观测器,可以得到d-q轴电流的新耦合项和扰动项之和dd、dq。
20.步骤三、将d-q轴的电流给定值与所述d-q轴的电流实际值误差经过线性控制器调节。
21.具体为:所述d-q轴的电流给定值分别为:d轴的电流给定值i
d*
是0,q轴的电流给定值i
q*
是速度pi控制器的输出,如图3所示。
22.进一步的将式(4)写成式(10)在实际工程应用中,系统是离散化的,有采样周期,因此可以有其中,x
*
为给定值,x为实际值。
23.将式(11)写成式(12):根据式(10)则可以得到:由于dd和dq包含了d-q轴电流的耦合项,因此d-q轴电流给定值与实际值误差无需pi控制器调节,通过线性控制器调节即可。
24.步骤四、将所述d-q轴的电流的新耦合项和扰动项之和分别补偿至d-q轴电流的线性控制器的输出进行扰动项补偿,从而获得d-q轴的电压给定值。
25.具体为:式(13)为本发明提取d-q轴电流耦合项和扰动项后,补偿至至d-q轴电流的给定值与实际值误差的线性控制器输出处,从而得到d-q轴的电压给定值。如图3所示,图3所示为基于扰动观测器的永磁同步电机(pmsm)控制系统拓扑图,速度环控制器仍然采用传统pi控制器,ωe可以通过速度传感器获得。
26.步骤五、将上述d-q轴的电压给定值通过svpwm调制技术生成pwm波形,从而驱动电机。
27.图4为传统pi调节器下的a相电流波形及其频谱,从图4中可以看出,a相电流波形在过零点和峰值处有明显的畸变,正弦度不够,这是因为由于逆变器的死区时间引起的5次
和7次谐波。
28.从频谱图可以得出,a相电流的5次和7次谐波分量突出,分别为3.71%和1.63%,thd=5.53%,这充分说明了电流谐波的存在。
29.图5为本发明所用方法下的a相电流波形及其频谱,从图5中可以看出,运用本发明的方法后,较比图4,a相电流波形在过零点和峰值处的畸变有着明显的改善,同时正弦度也有了提高。
30.从频谱图可以看出,运用本发明方法后,a相电流的5次和7次谐波分别为2.74%和1.53%,thd=4.65%。较没加入扰动观测器,thd减小了16%,5次和7次谐波分别减小了26%和17%。这充分说明了,本发明方法可以抑制a相电流5次和7次谐波。同时,也可以实现d-q轴电流的解耦控制。
31.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明实施例揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。