1.本发明涉及一种驱动器检测热过载方法及系统。
背景技术:
2.在机器人控制领域,机器人的运行安全十分重要。尤其是一些重载机器人,通常负载电流很大。
3.然而,现有技术中尚未有一种能够实时监测负载电流变化情况的驱动器检测热过载方法及系统。
技术实现要素:
4.有鉴于此,有必要提供一种驱动器检测热过载方法及系统,其能够实时监测负载电流变化情况。
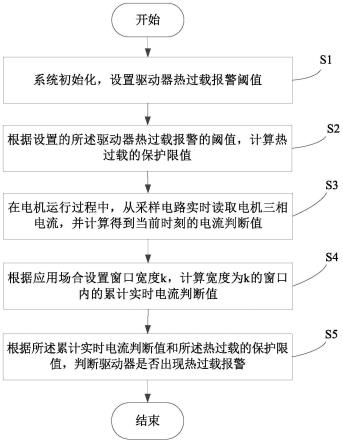
5.本发明一种驱动器检测热过载方法,该方法包括如下步骤:a.系统初始化,设置驱动器热过载报警阈值;b.根据设置的所述驱动器热过载报警的阈值,计算热过载的保护限值;c.在电机运行过程中,从采样电路实时读取电机三相电流,并计算得到当前时刻的电流判断值;d.根据应用场合设置窗口宽度k及当前时刻的电流判断值,计算宽度为k的窗口内的累计实时电流判断值;e.根据所述累计实时电流判断值和所述热过载的保护限值,判断驱动器是否出现热过载报警。
6.进一步地,所述的步骤b具体包括:
7.根据设置的驱动器热过载报警阈值th,计算热过载的保护限值i
2p
,公式如下:
8.i
2p
=3*(irate*th)29.其中,irate为电机的额定电流值。
10.进一步地,所述的步骤c具体包括:
11.在电机运行过程中,从采样电路实时读取t时刻的三相电流值:ia(t)、ib(t)、ic(t);
12.根据读取的ia(t)、ib(t)、ic(t),计算得到t时刻电流判断值i(t)2,计算公式如下所示:
13.i(t)2=ia(t)2 ib(t)2 ic(t)2。
14.进一步地,所述的步骤d具体包括如下步骤:
15.根据当前时刻m的大小,按照两种方式计算宽度为k的窗口内的累计实时电流判断值i
2average
:
16.当m<k时,按照下列公式计算i
2average
:
[0017][0018]
当m≥k时,按照下列公式计算i
2average
:
[0019][0020]
其中,m为当前时刻。
[0021]
进一步地,所述的步骤e具体包括如下步骤:
[0022]
通过累计实时电流判断值i
2average
和热过载的保护限值i
2p
的比较,判断驱动器是否出现热过载报警:
[0023]
当i
2average
<i
2p
时,电机运行正常;
[0024]
当i
2average
≥i
2p
时,触发热过载报警,电机停止运行。
[0025]
本发明提供还一种驱动器检测热过载系统,该系统包括设置模块、计算模块、判断模块,其中:所述设置模块用于在系统初始化时,设置驱动器热过载报警阈值;所述计算模块用于根据设置的所述驱动器热过载报警的阈值,计算热过载的保护限值;所述计算模块还用于在电机运行过程中,从采样电路实时读取电机三相电流,并计算得到当前时刻的电流判断值;所述计算模块还用于根据应用场合设置窗口宽度k,计算宽度为k的窗口内的累计实时电流判断值;所述判断模块用于根据所述累计实时电流判断值和所述热过载的保护限值,判断驱动器是否出现热过载报警。
[0026]
进一步地,所述根据设置的所述驱动器热过载报警的阈值,计算热过载的保护限值,具体包括:
[0027]
根据设置的驱动器热过载报警阈值th,计算热过载的保护限值i
2p
,公式如下:
[0028]i2p
=3*(irate*th)2[0029]
其中,irate为电机的额定电流值。
[0030]
进一步地,所述在电机运行过程中,从采样电路实时读取电机三相电流,并计算得到当前时刻的电流判断值,具体用于:
[0031]
在电机运行过程中,从采样电路实时读取t时刻的三相电流值:ia(t)、ib(t)、ic(t);
[0032]
根据读取的ia(t)、ib(t)、ic(t),计算得到t时刻电流判断值i(t)2,计算公式如下所示:
[0033]
i(t)2=ia(t)2 ib(t)2 ic(t)2。
[0034]
进一步地,所述根据应用场合设置窗口宽度k,计算宽度为k的窗口内的累计实时电流判断值,具体用于:
[0035]
根据当前时刻m的大小,按照两种方式计算宽度为k的窗口内的累计实时电流判断值i
2average
:
[0036]
当m<k时,按照下列公式计算i
2average
:
[0037][0038]
当m≥k时,按照下列公式计算i
2average
:
[0039][0040]
其中,m为当前时刻。
[0041]
进一步地,所述的判断模块具体用于:
[0042]
通过累计实时电流判断值i
2average
和热过载的保护限值i
2p
的比较,判断驱动器是否出现热过载报警:
[0043]
当i
2average
<i
2p
时,电机运行正常;
[0044]
当i
2average
≥i
2p
时,触发热过载报警,电机停止运行。
[0045]
本发明能够实时监测负载电流变化情况,如发现异常,及时报警,保证了机器人的安全。本发明实现了驱动器智能检测热过载,既避免了机器人的误报警问题,又保证了机器人在过载情况下的及时报警。
附图说明
[0046]
图1为本发明驱动器检测热过载方法的流程图。
[0047]
图2为本发明驱动器检测热过载系统的硬件架构图。
具体实施方式
[0048]
下面结合附图及具体实施例对本发明作进一步详细的说明。
[0049]
驱动器在控制电机运行时,电机会产生a、b、c三相电流,电机电流会随着负载的增大而增大,当机器人突遇颠簸路面时,电机电流会瞬时增大,因此需根据电机电流情况,判断机器人当前负载状态。
[0050]
参阅图1所示,是本发明驱动器检测热过载方法较佳实施例的作业流程图。
[0051]
步骤s1,系统初始化,设置驱动器热过载报警阈值。具体而言:
[0052]
系统进行初始化,设置驱动器热过载报警阈值th。
[0053]
其中,根据应用环境设置th大小,本实施例中th取1.3-1.5。
[0054]
步骤s2,根据设置的所述驱动器热过载报警的阈值,计算热过载的保护限值。具体而言:
[0055]
本实施例中,根据设置的th值,计算热过载的保护限值i
2p
,公式如下:
[0056]i2p
=3*(irate*th)2[0057]
其中,th为热过载报警的阈值,irate为电机的额定电流值。
[0058]
步骤s3,在电机运行过程中,从采样电路实时读取电机三相电流,并计算得到当前时刻的电流判断值。具体而言:
[0059]
系统上电运行,在电机运行过程中,从采样电路实时读取t时刻的三相电流值:ia(t)、ib(t)、ic(t)。
[0060]
根据读取的ia(t)、ib(t)、ic(t),计算得到t时刻电流判断值i(t)2,计算公式如下所示:
[0061]
i(t)2=ia(t)2 ib(t)2 ic(t)2。
[0062]
步骤s4,根据应用场合设置窗口宽度k,计算宽度为k的窗口内的累计实时电流判断值。具体而言:
[0063]
为了提高检测系统精度,设置一个宽度为k的窗口,k可根据应用场合设置,本实施例中,k=100。计算宽度为k的窗口内的累计实时电流判断值i
2average
。根据当前时刻m的大小,按照下面两种方式计算i
2average
。
[0064]
当m<k时,按照下列公式计算i
2average
:
[0065][0066]
当m≥k时,按照下列公式计算i
2average
:
[0067][0068]
其中,m为当前时刻。
[0069]
步骤s5,根据所述累计实时电流判断值和所述热过载的保护限值,判断驱动器是否出现热过载报警。具体而言:
[0070]
通过累计实时电流判断值i
2average
和热过载的保护限值i
2p
的比较,判断驱动器是否出现热过载报警。判断依据如下:
[0071]
当i
2average
<i
2p
时,电机运行正常。
[0072]
当i
2average
≥i
2p
时,触发热过载报警,电机停止运行。
[0073]
参阅图2所示是本发明驱动器检测热过载系统10的硬件架构图。该系统包括:设置模块101、计算模块102、判断模块103。
[0074]
所述设置模块101用于在系统初始化时,设置驱动器热过载报警阈值。具体而言:
[0075]
系统进行初始化,设置模块101设置驱动器热过载报警阈值th。
[0076]
其中,根据应用环境设置th大小,本实施例中th取1.3-1.5。
[0077]
所述计算模块102用于根据设置的所述驱动器热过载报警的阈值,计算热过载的保护限值。具体而言:
[0078]
本实施例中,根据设置的th值,所述计算模块102计算热过载的保护限值i
2p
,公式如下:
[0079]i2p
=3*(irate*th)2[0080]
其中,th为热过载报警的阈值,irate为电机的额定电流值。
[0081]
所述计算模块102还用于在电机运行过程中,从采样电路实时读取电机三相电流,并计算得到当前时刻的电流判断值。具体而言:
[0082]
系统上电运行,在电机运行过程中,所述计算模块102从采样电路实时读取t时刻的三相电流值:ia(t)、ib(t)、ic(t)。
[0083]
所述计算模块102根据读取的ia(t)、ib(t)、ic(t),计算得到t时刻电流判断值i(t)2,计算公式如下所示:
[0084]
i(t)2=ia(t)2 ib(t)2 ic(t)2。
[0085]
所述计算模块102还用于根据应用场合设置窗口宽度k,计算宽度为k的窗口内的累计实时电流判断值。具体而言:
[0086]
为了提高检测系统精度,设置一个宽度为k的窗口,k可根据应用场合设置,本实施例中,k=100。所述计算模块102计算宽度为k的窗口内的累计实时电流判断值i
2average
。根据当前时刻m的大小,按照下面两种方式计算i
2average
。
[0087]
当m<k时,按照下列公式计算i
2average
:
[0088][0089]
当m≥k时,按照下列公式计算i
2average
:
[0090][0091]
其中,m为当前时刻。
[0092]
所述判断模块103用于根据所述累计实时电流判断值和所述热过载的保护限值,判断驱动器是否出现热过载报警。具体而言:
[0093]
所述判断模块103通过累计实时电流判断值i
2average
和热过载的保护限值i
2p
的比较,判断驱动器是否出现热过载报警。判断依据如下:
[0094]
当i
2average
<i
2p
时,所述判断模块103判断电机运行正常。
[0095]
当i
2average
≥i
2p
时,所述判断模块103触发热过载报警,电机停止运行。
[0096]
本发明能够准确判断电机是否出现热过载现象,避免电机长时间过载运行烧坏,同时提高了检测精度,有效避免了误触发报警、机器人误停的情况。
[0097]
虽然本发明参照当前的较佳实施方式进行了描述,但本领域的技术人员应能理解,上述较佳实施方式仅用来说明本发明,并非用来限定本发明的保护范围,任何在本发明的精神和原则范围之内,所做的任何修饰、等效替换、改进等,均应包含在本发明的权利保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。