1.本发明涉及步进电机控制装置、机芯、钟表和步进电机控制方法。
背景技术:
2.以往,具有检测钟表的指针的位置的方法。例如,提出了以通常驱动时的驱动脉冲对步进电机进行驱动并利用感应电压检测转子的旋转状态的技术(例如,参照专利文献1)。
3.专利文献1:日本特开昭62-291591号公报
4.根据专利文献1所记载的现有技术,在转子的旋转状态的检测中,需要在对步进电机施加通常驱动脉冲之后,转子以一定以上的速度振动,产生规定的阈值电压以上的感应电压。但是,根据电机的不同而难以产生感应电压,产生了有时难以检测旋转状态的问题。
技术实现要素:
5.本发明正是鉴于这样的状况而完成的,其目的在于进行指针的位置的检测。
6.本发明的一个方式的步进电机控制装置具有:驱动部,其对步进电机进行驱动,所述步进电机具有使指针旋转的转子以及产生用于使所述转子旋转的磁通的线圈;控制部,其向所述驱动部输出用于使所述转子旋转的驱动脉冲以及用于使所述转子摆动的摆动脉冲;电压检测部,其检测在所述转子振动的情况下在所述线圈中产生的感应电压;以及判定部,其根据所述电压检测部所检测的结果,判定所述转子所承受的机械负载。
7.此外,在本发明的一个方式的步进电机控制装置中,所述控制部在输出所述摆动脉冲之后,经过了规定的期间后输出所述驱动脉冲。
8.此外,在本发明的一个方式的步进电机控制装置中,作为所述机械负载,所述判定部判定基于所述转子的旋转而旋转的第1齿轮是否与具有负载齿的第2齿轮的所述负载齿接触。
9.此外,在本发明的一个方式的步进电机控制装置中,所述控制部根据由所述判定部判定出的所述机械负载,控制对所述步进电机进行驱动的能量。
10.此外,在本发明的一个方式的步进电机控制装置中,所述控制部通过控制所述驱动脉冲的输出时间,控制对所述步进电机进行驱动的能量。
11.此外,在本发明的一个方式的步进电机控制装置中,所述控制部通过控制所述步进电机的激励方法,控制对所述步进电机进行驱动的能量。
12.此外,在本发明的一个方式的步进电机控制装置中,所述控制部通过控制所述驱动脉冲的占空比,控制对所述步进电机进行驱动的能量。
13.此外,在本发明的一个方式的步进电机控制装置中,所述控制部通过控制所述驱动脉冲的电压,控制对所述步进电机进行驱动的能量。
14.此外,在本发明的一个方式的步进电机控制装置中,所述摆动脉冲是第1摆动脉冲和第2摆动脉冲中的任意摆动脉冲,该第1摆动脉冲具有使所述转子沿第1旋转方向旋转的能量并使所述转子摆动,该第2摆动脉冲具有使所述转子沿第2旋转方向旋转的能量并使所
述转子摆动,该第2摆动脉冲是在输出所述第1摆动脉冲之后输出的。
15.此外,在本发明的一个方式的步进电机控制装置中,所述第1旋转方向是正转方向,所述第2旋转方向是与所述第1旋转方向相反的方向。
16.此外,在本发明的一个方式的步进电机控制装置中,所述控制部在与输出所述驱动脉冲的规定的周期相应地输出所述摆动脉冲的情况下,输出所述第1摆动脉冲,在按照不与输出所述驱动脉冲的规定的周期相对应的规定的定时输出所述摆动脉冲的情况下,输出所述第1摆动脉冲和所述第2摆动脉冲。
17.此外,在本发明的一个方式的步进电机控制装置中,所述判定部根据所述电压检测部所检测的电压值是否超过规定的阈值,判定所述转子所承受的所述机械负载。
18.此外,在本发明的一个方式的步进电机控制装置中,所述判定部根据所述电压检测部所检测的电压值的产生定时是否在规定的期间内,判定所述转子所承受的所述机械负载。
19.在本发明的一个方式的步进电机控制装置中,所述控制部具有输出所述摆动脉冲的摆动脉冲输出模式和不输出所述摆动脉冲的摆动脉冲非输出模式。
20.此外,在本发明的一个方式的步进电机控制装置中,在从所述控制部输出了所述驱动脉冲的情况下,所述驱动部利用第1电压对所述步进电机进行驱动,在从所述控制部输出了所述摆动脉冲的情况下,所述驱动部利用比所述第1电压低的第2电压对所述步进电机进行驱动。
21.此外,在本发明的一个方式的步进电机控制装置中,在由所述判定部判定出的所述转子所承受的所述机械负载比规定的阈值小的情况下,所述控制部施加能量不同的多个等级的所述驱动脉冲中的、等级比上一次施加的所述驱动脉冲大的所述驱动脉冲,在连续规定次数以上得到了由所述判定部判定出的所述转子所承受的所述机械负载比规定的阈值大的结果的情况下,所述控制部施加能量不同的多个等级的所述驱动脉冲中的、等级比上一次施加的所述驱动脉冲小的所述驱动脉冲。
22.此外,在本发明的一个方式的步进电机控制装置中,在具有负载齿的齿轮转1圈的情况下,所述控制部根据由所述判定部判定为所述转子所承受的所述机械负载比规定的阈值大的次数,选择施加能量不同的多个等级的所述摆动脉冲中的、哪一个等级的所述摆动脉冲。
23.此外,在本发明的一个方式的步进电机控制装置中,所述控制部在对所述摆动脉冲的等级进行控制的期间,不进行所述驱动脉冲的控制。
24.本发明的一个方式的机芯具有:上述的步进电机控制装置;以及所述步进电机。
25.本发明的一个方式的钟表具有上述的机芯。
26.本发明的一个方式的步进电机控制方法,其中,通过对具有使指针旋转的转子以及产生用于使所述转子旋转的磁通的线圈的步进电机施加驱动脉冲来使所述转子旋转,或者通过对所述步进电机施加摆动脉冲来使所述转子摆动,检测在所述转子振动的情况下在所述线圈中产生的感应电压,根据所检测的结果,判定所述转子所承受的机械负载。
27.根据本发明,能够进行指针的位置的检测。
附图说明
28.图1是第1实施方式的钟表的外观图。
29.图2是第1实施方式的机芯正面侧的俯视图。
30.图3是第1实施方式的机芯背面侧的俯视图。
31.图4是示出第1实施方式的机芯的一部分的俯视图,并是从正面侧观察到的第1轮系组的图。
32.图5是第1实施方式的24时齿轮的俯视图。
33.图6是示出第1实施方式的钟表的功能结构的一例的图。
34.图7是示出第1实施方式的指针驱动部的结构的一例的图。
35.图8是示出第1实施方式中的摆动脉冲和驱动脉冲的一例的图。
36.图9是示出第1实施方式中的负载齿与小齿轮啮合的情况下的振动、和标准齿与小齿轮啮合的情况下的振动的一例的图。
37.图10是示出第1实施方式中的步进电机控制装置的动作的一例的流程图。
38.图11是第2实施方式中的机芯正面侧的俯视图。
39.图12是示出第2实施方式中的指针驱动部的结构的一例的图。
40.图13是示出第2实施方式中的摆动脉冲和驱动脉冲的一例的图。
41.图14是示出第2实施方式中的摆动脉冲和驱动脉冲的变形例的图。
42.图15是示出第3实施方式中的通过控制驱动脉冲的输出时间来控制对步进电机进行驱动的能量的情况的一例的图。
43.图16是示出第3实施方式中的通过控制步进电机的激励方法来控制对步进电机进行驱动的能量的情况的一例的图。
44.图17是第3实施方式中的通过控制驱动脉冲的占空比来控制对步进电机进行驱动的能量的情况的一例的图。
45.图18是第3实施方式中的通过控制驱动脉冲的电压来控制对步进电机进行驱动的能量的情况的一例的图。
46.图19是示出第4实施方式中的摆动脉冲和驱动脉冲的一例的图。
47.图20是使第5实施方式中的驱动脉冲和摆动脉冲的电压发生了变化的情况下的感应电压的检测有无的图。
48.图21是说明第6实施方式中的驱动脉冲等级控制的图。
49.图22是说明第7实施方式中的摆动脉冲等级控制的图。
50.图23是说明第8实施方式中的组合了驱动脉冲等级控制和摆动脉冲控制的情况的一例的图。
51.标号说明
52.1:钟表;4:机芯(钟表用机芯);6:时针(指针);20a:第1电机(步进电机);22:转子;30:第1轮系组(轮系组);34b:第3时中间小齿轮(第1齿轮);42a:24时齿轮(第2齿轮);61a:第1标准齿;61b:第2标准齿;62:负载齿;62a:第1负载齿;100:步进电机控制装置;101:振荡电路;102:分频电路;103:控制电路;105:电压检测电路;106:电机驱动电路;107:步进电机;110:指针驱动部;201:定子;202:转子;203:转子收纳用贯通孔;204、205:内切口;206、207:外切口;208:磁芯;209:线圈。
具体实施方式
53.以下,基于附图对本发明的实施方式进行说明。另外,在以下的说明中,对具有相同或者类似的功能的结构标注相同的标记。而且,有时省略这些结构的重复说明。
54.[第1实施方式]
[0055]
通常,将包括钟表的驱动部分的机械体称作“机芯”。将表盘、针安装于该机芯并放入钟表壳体中从而形成为完成品的状态称作钟表的“成品(complete)”。将构成钟表的基板的底板的两侧中的、钟表壳体的玻璃所在的一侧(即存在表盘的一侧)称作机芯的“背面侧”。另外,将底板的两侧中的、钟表壳体的壳体后盖所在的一侧(即与表盘相反的一侧)称作机芯的“正面侧”。
[0056]
图1是第1实施方式的钟表的外观图。
[0057]
如图1所示,本实施方式的钟表1的成品在由未图示的壳体后盖和玻璃3构成的钟表壳体2内具备:机芯4(钟表用机芯)、具有刻度的表盘5、时针6(指针)、分针7、秒针8和24时针9。在表盘5上开设有日期窗口5a,该日期窗口5a用于明示后述的日期轮46所显示的日期字符46a。由此,钟表1除了能够确认时间外,还能够确认日期。
[0058]
图2是第1实施方式的机芯正面侧的俯视图。图3是第1实施方式的机芯背面侧的俯视图。
[0059]
如图2和图3所示,机芯4具有底板11、日期轮压板13、第1电机20a、第2电机20b、第1轮系组30和第2轮系组50。底板11构成机芯4的基板。日期轮压板13配置于底板11的背面侧。
[0060]
如图2所示,第1电机20a和第2电机20b分别是具有定子21和转子22的步进电机。第1电机20a和第2电机20b分别以1步(step)使转子22旋转180
°
。第1电机20a产生使时针6、24时针9和日期轮46(均参照图1)旋转的动力。第2电机20b产生使分针7和秒针8(均参照图1)旋转的动力。在第1电机20a和第2电机20b各自的转子22形成有小齿轮。
[0061]
图4是示出第1实施方式的机芯的一部分的俯视图,是从正面侧观察到的第1轮系组的图。
[0062]
如图3和图4所示,第1轮系组30具有基于第1电机20a的转子22的旋转而旋转的齿轮。第1轮系组30具有:时轮系31,其将第1电机20a的转子22的旋转传递到时针6;以及日历轮系41,其将第1电机20a的转子22的旋转传递到24时针9(参照图1)和日期轮46。
[0063]
如图4所示,时轮系31具有第1时中间轮32、第2时中间轮33、第3时中间轮34和时轮35。
[0064]
第1时中间轮32以能够旋转的方式被支承于底板11(参照图2)。第1时中间轮32具有第1时中间齿轮32a和第1时中间小齿轮32b。第1时中间齿轮32a与第1电机20a的转子22的小齿轮啮合。第1时中间轮32相对于转子22以减速比6旋转。即,第1时中间轮32在第1电机20a的转子22每旋转6圈时,旋转1圈。
[0065]
第2时中间轮33以能够旋转的方式被支承于底板11。第2时中间轮33具有第2时中间齿轮33a和第2时中间小齿轮33b。第2时中间齿轮33a与第1时中间轮32的第1时中间小齿轮32b啮合。第2时中间轮33是相对于第1时中间轮32的从动齿轮。第2时中间轮33相对于第1时中间轮32以减速比7.5旋转。即,第2时中间轮33相对于第1电机20a的转子22以减速比45旋转。
[0066]
第3时中间轮34以能够旋转的方式被支承于底板11。第3时中间轮34具有第3时中
间齿轮34a和第3时中间小齿轮34b(第1齿轮)。第3时中间齿轮34a与第2时中间轮33的第2时中间小齿轮33b啮合。第3时中间轮34是相对于第2时中间轮33的从动齿轮。第3时中间轮34相对于第2时中间轮33以减速比8旋转。即,第3时中间轮34相对于第1电机20a的转子22以减速比360旋转。
[0067]
时轮35以能够旋转的方式外插于底板11所保持的中心管(未图示)。时轮35从背面侧经由针座被按压于日期轮压板13(参照图3)。时轮35的背面侧的端部从日期轮压板13起向背面侧突出。在时轮35的背面侧的端部安装有时针6(参照图1)。时轮35具有时轮齿轮35a。时轮齿轮35a与第3时中间轮34的第3时中间齿轮34a啮合。时轮35是相对于第3时中间轮34的从动齿轮。时轮35相对于第3时中间轮34以减速比1旋转。即,时轮35相对于第1电机20a的转子22以减速比360旋转。
[0068]
日历轮系41具有上述的第1时中间轮32、第2时中间轮33和第3时中间轮34、24时轮42和换日中间轮43。
[0069]
24时轮42以能够旋转的方式被支承于底板11。24时轮42的轴部从日期轮压板13向背面侧突出。在轴部的背面侧的端部安装有24时针9(参照图1)。24时轮42具有24时齿轮42a(第2齿轮)。24时齿轮42a与第3时中间轮34的第3时中间小齿轮34b啮合。24时轮42是相对于第3时中间轮34的从动齿轮。24时轮42相对于第3时中间轮34以减速比2旋转。即,24时轮42相对于第1电机20a的转子22以减速比720旋转。
[0070]
换日中间轮43以能够旋转的方式被支承于底板11。换日中间轮43的旋转中心设置于绕24时轮42的旋转中心从第3时中间轮34的旋转中心偏离小于180
°
的角度的位置。即,换日中间轮43的旋转中心设置于从在俯视观察时通过24时轮42的旋转中心和第3时中间轮34的旋转中心的直线上偏离的位置。换日中间轮43具有换日中间齿轮43a和圆板轮43b。换日中间齿轮43a与24时齿轮42a啮合。换日中间轮43是相对于24时轮42的从动轮。换日中间轮43相对于24时轮42以减速比1旋转。即,换日中间轮43相对于第1电机20a的转子22以减速比720旋转。圆板轮43b与换日中间齿轮43a重叠。圆板轮43b具有进给齿43c。进给齿43c从圆板轮43b的外周面向径向外侧突出。
[0071]
换日轮44以能够旋转的方式被支承于底板11。换日轮44具有换日齿轮44a。换日齿轮44a形成为能够与换日中间轮43的进给齿43c啮合。换日轮44通过使换日中间轮43的进给齿43c进入换日齿轮44a的旋转轨迹并啮合来旋转。因此,换日轮44借助换日中间轮43的旋转来间歇地旋转。换日轮44使日期轮46旋转。
[0072]
日期轮46是以能够旋转的方式安装于底板11的环状部件。日期轮46被日期轮压板13从背面侧按压(参照图3)。在日期轮46的背面沿周向显示有日期信息即日期字符46a(参照图1)。日期轮46通过表盘5的日期窗5a使日期字符46a露出,由此显示日期信息。在日期轮46的内周缘,遍及整周地形成有多个内齿46b。内齿46b与换日齿轮44a啮合。日期轮46与换日轮44的旋转联动地旋转。因此,日期轮46借助换日中间轮43的旋转来间歇地旋转。日期轮46在旋转方向上的位置被定位杆47矫正。定位杆47通过使前端的爪与日期轮46的内齿46b卡合来限制日期轮46的旋转。
[0073]
如图2所示,第2轮系组50具有基于第2电机20b的转子22的旋转而旋转的齿轮。第2轮系组50具有前轮系51,该前轮系51将第2电机20b的转子22的旋转传递到秒针8和分针7(均参照图1)。前轮系51具有四号中间轮52、四号轮53、三号轮54和二号轮55。
[0074]
四号中间轮52以能够旋转的方式被支承于底板11。四号中间轮52具有四号中间齿轮52a和四号中间小齿轮52b。四号中间齿轮52a与第2电机20b的转子22的小齿轮啮合。四号中间轮52相对于第2电机20b的转子22以减速比6旋转。
[0075]
四号轮53以能够旋转的方式配置于底板11。四号轮53具有:四号柄轴(未图示)、组装于四号柄轴的四号齿轮53b和形成于四号柄轴的四号小齿轮(未图示)。四号柄轴被插入于后述的二号柄轴的内侧。四号柄轴的背面侧的端部安装有秒针8(参照图1)。四号齿轮53b与四号中间小齿轮52b啮合。四号轮53是相对于四号中间轮52的从动齿轮。四号轮53相对于四号中间轮52以减速比10旋转。即,四号轮53相对于第2电机20b的转子22以减速比60旋转。
[0076]
三号轮54以能够旋转的方式被支承于底板11。三号轮54具有三号齿轮54a和三号小齿轮(未图示)。三号齿轮54a与四号小齿轮啮合。三号轮54是相对于四号轮53的从动齿轮。三号轮54相对于四号轮53以减速比20旋转。即,三号轮54相对于第2电机20b的转子22以减速比400旋转。
[0077]
二号轮55被中心管(未图示)支承成能够旋转。二号轮55具有二号柄轴(未图示)和安装于二号柄轴的二号齿轮55b。二号柄轴形成为圆筒状,被插入于中心管的内侧。在二号柄轴的背面侧的端部安装有分针7(参照图1)。二号齿轮55b与三号小齿轮啮合。二号轮55是相对于三号轮54的从动齿轮。二号轮55相对于三号轮54以减速比9旋转。即,二号轮55相对于第2电机20b的转子22以减速比3600旋转。
[0078]
图5是示出第1实施方式的24时齿轮的俯视图。
[0079]
如图5所示,24时齿轮42a具有多个齿60和弹性部65。多个齿60包含标准齿61和作为负载齿62的第1负载齿62a。标准齿61是多个齿60中的、除了第1负载齿62a以外的全部齿。标准齿61是一般的齿轮的齿,是形成为圆弧齿形、渐开线齿形、摆线齿形等的齿。第1负载齿62a是24时齿轮42a分别所具有的多个齿60中的1个齿。第1负载齿62a以在使24时齿轮42a旋转时不以等间隔与第3时中间小齿轮34b接触的方式,配置于24时齿轮42a的外周的单侧。第1负载齿62a被支承于弹性部65,由此形成为能够弹性地位移。
[0080]
弹性部65设置于每个负载齿62。弹性部65是在前端具有负载齿62且形成为能够挠曲变形的悬臂梁。弹性部65具有第1弹性部65a,该第1弹性部65a具有第1负载齿62a。第1弹性部65a是形成于24时齿轮42a的第1狭缝67与第2狭缝68之间的部分。第1狭缝67在从与第1负载齿62a相邻的一个齿槽朝向径向内侧延伸后,朝向周向的一侧延伸。第2狭缝68从与第1负载齿62a相邻的另一个齿槽起沿着第1狭缝67延伸。由此,第1弹性部65a以大致恒定的宽度延伸,并形成为能够以使前端的第1负载齿62a沿径向位移的方式弹性变形。
[0081]
在此,如下对多个标准齿61中的第1标准齿61a、第2标准齿61b进行定义。第1标准齿61a在24时齿轮42a的正转方向n(规定的旋转方向)的下游侧与第1负载齿62a相邻。第2标准齿61b在正转方向n的上游侧与第1负载齿62a相邻。
[0082]
第1负载齿62a与第1标准齿61a的间隔比第1负载齿62a与第2标准齿61b的间隔窄。第1负载齿62a与第1标准齿61a之间的齿槽的宽度比第3时中间小齿轮34b的齿的齿厚小。另外,相邻的一对齿60之间的齿槽的宽度为24时齿轮42a的节圆上的一对齿60之间的距离。齿60的齿厚是24时齿轮42a的节圆上的齿60的厚度。由此,第3时中间小齿轮34b的齿在进入第1负载齿62a与第1标准齿61a之间的齿槽时,与第1负载齿62a接触。第1负载齿62a与第2标准齿61b之间的齿槽的宽度比第3时中间小齿轮34b的齿的齿厚大。由此,第3时中间小齿轮34b
的齿不与第1负载齿62a接触而能够进入第1负载齿62a与第2标准齿61b之间的齿槽。
[0083]
在此,对负载齿62的作用进行说明。另外,在以下的说明中,只要没有特别说明,24时齿轮42a沿正转方向n旋转。第3时中间小齿轮34b的齿从正转方向n的上游侧起与24时齿轮42a的各齿60接触。
[0084]
在与第3时中间小齿轮34b卡合的齿60替换为第1标准齿61a时,第3时中间小齿轮34b的齿进入第1标准齿61a与第1负载齿62a之间的齿槽。这时,第3时中间小齿轮34b的齿在与第1标准齿61a接触的前后与第1负载齿62a接触,以扩大第1标准齿61a与第1负载齿62a之间的齿槽的宽度的方式使第1负载齿62a弹性地位移。由此,在日历轮系41中产生伴随第1负载齿62a的弹性位移的能量损耗。然后,当与第3时中间小齿轮34b卡合的齿60替换为第1负载齿62a时,第1负载齿62a朝向初始位置逐渐恢复。然后,在与第3时中间小齿轮34b卡合的齿60从第1负载齿62a替换为第2标准齿61b时,第3时中间小齿轮34b的齿在第1负载齿62a与第2标准齿61b之间的齿槽中从第1负载齿62a完全分离,第1负载齿62a恢复到初始位置。
[0085]
如上所述,在24时齿轮42a的第1负载齿62a与第3时中间小齿轮34b接触时,在日历轮系41中产生能量损耗。即,在24时齿轮42a每旋转1圈时,两次在日历轮系41中产生能量损耗。当在日历轮系41中产生能量损耗时,第1电机20a的转子22所承受的负载发生变动。由此,负载齿62能够对转子22所承受的负载赋予变动。另外,负载齿62所赋予的负载的变动不同于标准齿61与第3时中间小齿轮34b接触时的负载即可。以下,有时将转子22所承受的负载称作旋转负载。
[0086]
[钟表的功能结构]
[0087]
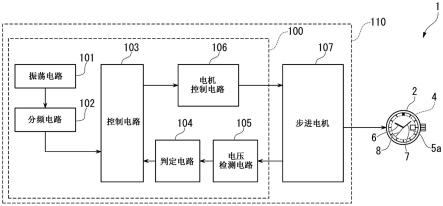
图6是示出第1实施方式的钟表的功能结构的一例的图。参照该图,说明钟表1的功能结构。钟表1具有振荡电路101、分频电路102、控制电路(控制部)103、判定电路(判定部)104、电压检测电路(电压检测部)105、电机驱动电路(驱动部)106、步进电机107、钟表壳体2、机芯4、时针6、分针7、秒针8和日期窗口5a。
[0088]
以下,将振荡电路101、分频电路102、控制电路103、判定电路104、电压检测电路105、电机驱动电路106也记作步进电机控制电路(步进电机控制装置)100。此外,将步进电机控制电路100和步进电机107也记作指针驱动部110。
[0089]
振荡电路101产生具有规定的频率的信号,将所产生的信号发送到分频电路102。分频电路102对从振荡电路101接收到的信号进行分频而产生作为计时基准的钟表信号,并将所产生的钟表信号发送到控制电路103。控制电路103根据从分频电路102接收到的钟表信号等来向钟表1的各部件发送控制信号,对钟表1的各部件的动作进行控制。
[0090]
电机驱动电路106从控制电路103取得控制信号,根据所取得的控制信号来对步进电机107进行驱动。步进电机107被电机驱动电路106驱动,经由轮系而使时针6、分针7、秒针8旋转。
[0091]
电压检测电路105检测在步进电机107振动的情况下在线圈中产生的感应电压。电压检测电路105将检测到的感应电压发送到判定电路104。
[0092]
判定电路104根据由电压检测电路105检测到的感应电压的值,判定步进电机107中具备的转子所承受的机械负载。例如,判定电路104根据电压检测电路105所检测的电压值是否超过规定的阈值,判定转子所承受的机械负载。
[0093]
[指针驱动部的结构]
[0094]
图7是示出第1实施方式的指针驱动部110的结构的一例的图。
[0095]
步进电机107具有定子201、转子202、转子收纳用贯通孔203、内切口204、内切口205、外切口206、外切口207、磁芯208和线圈209。以下,将转子收纳用贯通孔203也记作转子用贯通孔。
[0096]
磁芯208是由磁性材料制作成的部件,与定子201的两端接合。线圈209被卷绕于磁芯208,一端与端子out1连接,另一端与端子out2连接。线圈209通过流过驱动电流i来产生磁通。定子201是由磁性材料制作成的部件。定子201将线圈209所产生的磁通提供给转子202。
[0097]
转子202形成为圆柱状,以能够旋转的状态被插入到转子收纳用贯通孔203,该转子收纳用贯通孔203形成于定子201。即,步进电机107具有:定子201,其设置有转子收纳用贯通孔203;转子202,其以能够旋转的方式配设在转子收纳用贯通孔203内;以及线圈209,其设置于定子201。此外,转子202被磁化,因此具有n极和s极。在以下的说明中,将转子202的从s极朝向n极的轴也称作磁极轴a,将磁极轴a的从s极朝向n极的方向也称作磁极轴a的正的方向(或者简称作磁极轴a的方向)。
[0098]
转子202通过沿正转方向旋转来经由轮系使指针155沿顺时针方向旋转,通过沿反转方向旋转来经由轮系使指针155沿逆时针方向旋转。即,转子202沿使指针155沿顺时针方向旋转的正转方向旋转,以及使指针155沿与正转方向相反的方向即反转方向旋转。
[0099]
内切口204和内切口205是形成于转子收纳用贯通孔203的壁面的切口,决定了转子202相对于定子201的停止位置。即,例如,在线圈209未被激励的情况下,转子202在磁极轴与连结内凹口204和内凹口205的线段垂直的位置静止。
[0100]
外切口206和外切口207是分别形成于弯曲的定子201的内侧和外侧的切口。在外切口206与转子收纳用贯通孔203之间形成可饱和部210,在外切口207与转子收纳用贯通孔203之间形成可饱和部211。可饱和部210和可饱和部211是如下部分:不会因转子202的磁通而发生磁饱和,而是当线圈209被激励时达到磁饱和而磁阻变大。
[0101]
[步进电机的驱动]
[0102]
电机驱动电路106通过对线圈209的端子(第1端子out1和第2端子out2)间施加驱动脉冲,产生驱动电流i。
[0103]
步进电机控制装置100通过根据转子202的停止位置处的磁极轴a的方向而使向线圈209提供的驱动电流i的方向反转,使转子202沿固定的方向(例如正转方向)旋转。
[0104]
作为一例,对正转方向的驱动进行说明。在步进电机控制装置100向线圈209的第1端子out1与第2端子out2之间提供驱动脉冲时,在定子201中产生磁通。由此,可饱和部210和可饱和部211饱和从而磁阻增大,然后,由于在定子201中产生的磁极与转子202的磁极之间的相互作用,转子202沿逆时针方向旋转180度,稳定地停止。钟表1的指针155通过该大约180度的旋转,能够移动规定量的一个刻度。还有时将该规定量的动作称作1步。适当配置有轮系,该轮系在转子202与指针155之间具有适当的减速比,以使进行该规定量的动作。在本实施方式的一例中,通过1步的动作,指针155移动1秒。
[0105]
在转子202处于图7所示的状态的情况下,当步进电机控制装置100向线圈209的第1端子out1与第2端子out2之间提供驱动脉冲时,在线圈209中流过电流。在该一例中,第1端子out1为高电位,第2端子out2为低电位(以下,记作正向。)在施加了脉冲的情况下,沿电流
i的方向流过电流。当在线圈209中流过电流时,在定子201中产生磁通。通过该磁通,转子202沿逆时针方向旋转大约180度,稳定地停止。
[0106]
在转子202处于从图7的状态起旋转了大约180度的状态的情况下,在步进电机控制装置100施加了第1端子out1为低电位、第2端子out2为高电位(以下,记作负向。)的脉冲的情况下,在定子201中产生与施加了正向的脉冲的情况相反方向的磁通。由此,首先,可饱和部210和可饱和部211饱和,然后,由于在定子201中产生的磁极与转子202的磁极之间的相互作用,转子202沿逆时针方向旋转大约180度,稳定地停止。通过以这种方式向线圈209提供极性不同的信号(交变信号),转子202沿逆时针方向以大约180度为单位连续旋转。
[0107]
[摆动脉冲和驱动脉冲]
[0108]
图8是示出第1实施方式中的摆动脉冲和驱动脉冲的一例的图。图8的(a)是示出用于说明施加摆动脉冲和驱动脉冲的定时的时序图的图,图8的(b)是用于说明转子202的角度的图。在图8的(a)的说明中,横轴表示时刻,“out1”表示各时刻的施加于第1端子out1的电压的大小,“out2”表示各时刻的施加于第2端子out2的电压的大小。
[0109]
此外,在图8的(b)的说明中,将图7中所说明的磁极轴a的位置设为0度、将磁极轴a沿逆时针方向旋转的角度设为正的旋转角度来对转子202的旋转位置进行说明。时刻t11到时刻t21的控制是使转子202从0度起沿顺时针方向旋转至180度的控制,时刻t21到时刻t29的控制是使转子202从180度起沿顺时针方向旋转至0度的控制。
[0110]
控制电路103通过向电机驱动电路106输出驱动脉冲来使转子202旋转,通过向电机驱动电路106输出摆动脉冲来使转子202摆动。以下,分别说明摆动脉冲和驱动脉冲。
[0111]
在时刻t11到时刻t12,步进电机控制装置100对第2端子out2施加正向的脉冲。当对第2端子out2持续施加了正向的脉冲时,转子202在旋转了-45度的位置静止。步进电机控制装置100当在时刻t12停止脉冲的施加时,转子202被拉回0度的位置而静止。在此,转子202在从-45度的位置返回0度的位置时,由于惯性而至少一次沿逆时针方向旋转至正的旋转角度的位置,沿顺时针方向旋转至负的旋转角度的位置。转子202反复进行沿逆时针方向旋转和沿顺时针方向旋转。即,转子202振动,由于振动衰减而在0度的位置静止。
[0112]
另外,在时刻t11到时刻t12被施加的脉冲不是以转子202旋转大约180度为目的的脉冲,而是以通过使转子202振动来检测转子202的振动状态为目的的脉冲。以下,将以使转子202振动为目的的脉冲与通常的驱动脉冲相区分而记作摆动脉冲。
[0113]
另外,施加摆动脉冲的时间只要是足以使转子202振动的时间即可,直到转子202在-45度的旋转位置静止为止,不需要施加脉冲。
[0114]
在时刻t12到时刻t15,步进电机控制装置100判定转子202因摆动脉冲的施加而承受的机械负载。具体而言,判定电路104根据电压检测电路105检测到的电压,判定转子202所承受的机械负载。
[0115]
另外,判定电路104也可以除了电压检测电路105检测到的电压的大小以外,或者替代电压检测电路105检测到的电压的大小,还根据电压检测电路105检测超过预先确定的规定的电压值的电压值的定时,判定转子202所承受的机械负载。例如,判定电路104也可以根据电压检测电路105所检测的电压值的产生定时是否在预先确定的规定的期间内,判定转子202所承受的机械负载。
[0116]
在时刻t15到时刻t16,步进电机控制装置100对第1端子out1施加正向的脉冲。当
对第1端子out1持续施加了正向的脉冲时,转子202在旋转了135度的位置静止。当步进电机控制装置100在时刻t16停止了脉冲的施加时,转子202被拉向180度的位置而静止。在时刻t15到时刻t16被施加的脉冲是用于使转子202旋转大约180度的脉冲,因此是驱动脉冲。驱动脉冲通过控制电路103来输出。即,控制电路103在输出了摆动脉冲之后,经过了规定的期间后输出驱动脉冲。
[0117]
另外,施加驱动脉冲的时间(驱动脉冲的脉冲宽度)只要是足以使转子202旋转180度的时间即可,直到转子202在135度的旋转位置静止为止,不需要施加脉冲。
[0118]
另外,施加驱动脉冲的时间也可以根据由判定电路104判定出的机械负载而决定。在该情况下,控制电路103根据由判定电路104判定出的机械负载而控制驱动脉冲的输出时间。
[0119]
在时刻t21到时刻t22,步进电机控制装置100对第1端子out1施加正向的脉冲、即摆动脉冲。当对第1端子out1持续施加了正向的脉冲时,转子202在旋转了135度的位置静止。当步进电机控制装置100在时刻t22停止了脉冲的施加时,转子202被拉回180度的位置而静止。在此,转子202在从135度的位置返回180度的位置时振动,由于振动衰减而在180度的位置静止。
[0120]
在时刻t22到时刻t25,步进电机控制装置100判定转子202因摆动脉冲的施加而承受的机械负载。具体而言,判定电路104根据电压检测电路105检测到的电压,判定转子202所承受的机械负载。
[0121]
在时刻t25到时刻t26,步进电机控制装置100对第2端子out2施加正向的脉冲、即驱动脉冲。当对第2端子out2持续施加了正向的脉冲时,转子202在旋转了315度的位置静止。当步进电机控制装置100在时刻t26停止了脉冲的施加时,转子202被拉至0度的位置而静止。
[0122]
图9是示出第1实施方式中的负载齿与小齿轮啮合的情况下的振动、和标准齿与小齿轮啮合的情况下的振动的一例的图。参照该图,对负载齿与小齿轮啮合的情况下的振动、和标准齿与小齿轮啮合的情况下的振动进行说明。
[0123]
图的上段是标准齿与小齿轮啮合的情况的一例,图的下段是负载齿与小齿轮啮合的情况的一例。具体而言,对具有负载齿62的四号齿轮53b与四号中间小齿轮52b啮合的情况的一例进行说明。在该图的说明中,有时将四号齿轮53b简称作齿轮(或第2齿轮)、将四号中间小齿轮52b简称作小齿轮(或第1齿轮)。第1齿轮是基于转子202的旋转而旋转的齿轮,第2齿轮是具有负载齿的齿轮。
[0124]
图的左侧是示出齿轮与小齿轮的啮合的状态的图。图的右侧是示出施加摆动脉冲的定时和产生感应电压的定时的图。
[0125]
首先,对上段的标准齿60与小齿轮啮合的情况的一例进行说明。如上段左侧的图所示,当通过施加摆动脉冲来对小齿轮进行驱动的转子202振动时,小齿轮由于转子202的振动而振动。转子202能够振动的范围根据齿轮与小齿轮之间的齿隙(backlash)的大小而不同。在标准齿60与小齿轮啮合的状态下,齿隙较大,因此转子202能够振动的范围也较大。
[0126]
如上段右侧的图所示,在时刻t31到时刻t32,施加摆动脉冲。转子202根据所施加的摆动脉冲来振动,在时刻t33到时刻t35,产生感应电压。在标准齿60与小齿轮啮合的状态下,转子202能够振动的范围较大,因此,产生的感应电压也变大。在该图所示的一例中,在
时刻t34,产生了电压v1。作为机械负载,判定电路104判定小齿轮(第1齿轮)是否与齿轮(第2齿轮)的负载齿接触。
[0127]
接着,对下段的负载齿62与小齿轮啮合的情况的一例进行说明。如下段左侧的图所示,当通过施加摆动脉冲来对小齿轮进行驱动的转子202振动时,小齿轮由于转子202的振动而振动。但是,在负载齿62与小齿轮啮合的状态下,齿隙较小,因此,转子202能够振动的范围也较窄。
[0128]
如下段右侧的图所示,在时刻t41到时刻t42,施加摆动脉冲。转子202根据所施加的摆动脉冲来振动,在时刻t43到时刻t45,产生感应电压。但是,在负载齿62与小齿轮啮合的状态下,转子202能够振动的范围较窄,因此,产生的感应电压也变小。在该图所示的一例中,在时刻t44,产生了电压v2。电压v2比电压v1小。
[0129]
另外,小齿轮啮合在负载齿62与第1标准齿61a之间的情况下,振动变小,与此相对,在小齿轮啮合在负载齿62与第2标准齿61b之间的情况下,振动变大。也可以构成为对这些双方的振动与标准齿60与小齿轮啮合的情况下的振动进行比较,检测指针的位置。
[0130]
图10是示出第1实施方式中的步进电机控制装置100的动作的一例的流程图。参照该图,对步进电机控制装置100的一系列动作进行说明。
[0131]
(步骤s110)控制电路103向电机驱动电路106输出摆动脉冲。电机驱动电路106根据所取得的摆动脉冲,对步进电机107进行驱动。
[0132]
(步骤s120)电压检测电路105检测由于转子202振动而引起的感应电压。判定电路104根据检测到的感应电压的值或检测感应电压的定时,判定转子202的机械负载。
[0133]
(步骤s130)在从输出摆动脉冲起经过了规定时间的情况下(步骤s130;是),控制电路103使处理进入步骤s140。在从输出摆动脉冲起没有经过规定时间的情况下(步骤s130;否),电压检测电路105反复进行步骤s120。
[0134]
(步骤s140)控制电路103向电机驱动电路106输出驱动脉冲。驱动脉冲的大小(电压和时间)可以是预先确定的规定的值,也可以是基于在步骤s120中判定出的转子202的机械负载的值。
[0135]
[第2实施方式]
[0136]
图11是第2实施方式中的机芯正面侧的俯视图。参照该图,对第2实施方式进行说明。第2实施方式的钟表1-2替代第1实施方式中的第2电机20b而具备第2电机20b-2,在这一点上不同。第2电机20b是1线圈电机,与此相对,第2电机20b-2是2线圈电机。即,第2实施方式是钟表1-2具备2线圈电机的情况的一例。有时通过对与第1实施方式相同的结构标注与第1实施方式相同的标号,省略说明。
[0137]
图12是示出第2实施方式中的指针驱动部110a的结构的一例的图。
[0138]
步进电机107a是第2电机20b-2的一例。即,步进电机107a是2线圈电机。步进电机107a具有:定子120,其具有转子收纳孔125;以及转子130,其通过在径向上被磁化为2极而具有磁极性,以能够旋转的方式配设于转子收纳孔125。步进电机107a按照每步单位进行动作,使指针旋转。
[0139]
定子120具有:定子主体121;第1磁芯(第1端)140a,其与定子主体121磁性接合;第2磁芯(第2端)140b;第1线圈150a,其卷绕于第1磁芯140a;以及第2线圈150b,其卷绕于第2磁芯140b。
[0140]
定子主体121由使用了例如坡莫合金(permalloy)等高导磁率材料的板材形成。定子主体121具有t字状的第1磁轭122、一对第2磁轭123和第2磁轭124,在俯视观察时形成为h状。即,t字状的第1磁轭122具有在规定的第1方向上延伸的直线状部分122a、和一对伸出部122b及伸出部122c,该一对伸出部122b及伸出部122c从直线状部分122a的一端部起向与第1方向垂直的第2方向的两侧伸出。而且,第2磁轭123被设置为从直线状部分122a的另一端部起向与伸出部122b相同的一侧伸出,第2磁轭124被设置为从直线状部分122a的另一端部起向与伸出部122c相同的一侧伸出。根据这样的第1磁轭122、第2磁轭123和第2磁轭124的结构,定子主体121在俯视观察时形成为h状。另外,第1磁轭122、第2磁轭123和第2磁轭124一体形成。
[0141]
在定子主体121的第1磁轭122、第2磁轭123与第2磁轭124的交叉点形成有上述的圆孔状的转子收纳孔125。在转子收纳孔125的内周面,以在第2方向上排列并相互对置的方式形成有一对切口部125a。切口部125a被切成圆弧状。这些切口部125a构成为用于确定转子130的停止位置的定位部。在转子130的磁极轴位于与连接一对切口部125a的线段垂直的位置、即磁极轴位于沿着第1方向的位置时,转子130的势能变得最低,稳定地停止。以下,将转子130的磁极轴沿着第1方向并且转子130的n极朝向第1磁轭122侧时的转子130的停止位置(图12所示的位置)称作第1停止位置。此外,将转子130的磁极轴沿着第1方向并且转子130的s极朝向第1磁轭122侧时的转子130的停止位置称作第2停止位置。
[0142]
此外,在定子主体121中的转子收纳孔125的周围,形成有3处切口部126,该切口部126是从俯视观察时的定子主体121的外周缘朝向转子收纳孔125切开而成的。各切口部126由第1磁轭122与第2磁轭123连接的角部、第1磁轭122与第2磁轭124连接的角部和第2磁轭123与第2磁轭124连接的部分形成。各切口部126被切成圆弧状。
[0143]
定子主体121中的转子收纳孔125的周围由于各切口部126而局部变窄(以下,有时将局部变窄的部分称作狭小部)。狭小部与定子主体121的其他部分相比容易磁饱和,定子主体121由于狭小部的磁饱和而在转子收纳孔125的周围被磁性分割为3个。定子主体121具有:第1磁极部120a,其配设于转子130的周围的、与第2磁轭123对应的位置;第2磁极部120b,其配设于转子130的周围的、与第2磁轭124对应的位置;以及第3磁极部120c,其配设于转子130的周围的、与第1磁轭122的直线状部分122a对应的位置。
[0144]
在此,通过磁极轴a和垂直的直线b将转子130的各部分从标号130a划分为标号130d。在从第1磁极部120a中的、第2磁轭123与第2磁轭124连接的部分所形成的切口部126到第2磁轭123所形成的切口部125a的范围内沿着转子收纳孔125的部分与位于第1停止位置的转子130的标号130a所示的部分(位于第2停止位置的转子130的标号130c所示的部分)对置配置。在从第2磁极部120b中的、第2磁轭123与第2磁轭124连接的部分所形成的切口部126到第2磁轭124所形成切口部125a的范围内沿着转子收纳孔125的部分与位于第1停止位置的转子130的标号130b所示的部分(位于第2停止位置的转子130的标号130d所示的部分)对置配置。
[0145]
第3磁极部120c与位于第1停止位置的转子130的n极(位于第2停止位置的转子130的s极)对置配置。
[0146]
第1磁芯140a和第2磁芯140b的各磁芯由例如坡莫合金(permalloy)等高导磁率材料形成。第1磁芯140a与伸出部122c的前端部及第2磁轭124的前端部磁连接。第2磁芯140b
与伸出部122b的前端部及第2磁轭123的前端部磁连接。第1磁芯140a和第2磁芯140b的各磁芯的两端部例如通过螺钉紧固等与定子主体121连结。
[0147]
第1线圈150a卷绕于第1磁芯140a,与第2磁极部120b及第3磁极部120c磁耦合。第1线圈150a具有第1端子150aa和第2端子150ab。第1线圈150a卷绕成在从第1端子150aa朝向第2端子150ab流过电流时,在第1线圈150a内产生从伸出部122c侧朝向第2磁轭124侧的磁场。
[0148]
第2线圈150b卷绕于第2磁芯140b,与第1磁极部120a及第3磁极部120c磁耦合。第2线圈150b具有第1端子150ba和第2端子150bb。第2线圈150b卷绕成在从第1端子150ba朝向第2端子150bb流过电流时,在第2线圈150b内产生从第2磁轭123侧朝向伸出部122b侧的磁场。
[0149]
第1线圈150a的导线的线径与第2线圈150b的导线的线径相同。此外,第1线圈150a的匝数与第2线圈150b的匝数相同。第1线圈150a及第2线圈150b的端子与步进电机控制装置100连接。在以下的说明中,将第1线圈150a的第1端子150aa的电位设为out1、将第1线圈150a的第2端子150ab的电位设为out2、将第2线圈150b的第1端子150ba的电位设为out3、将第2线圈150b的第2端子150bb的电位设为out4。
[0150]
这样构成的定子120在从第1线圈150a或第2线圈150b产生磁通时,沿着第1磁芯140a及第2磁芯140b的各磁芯和定子主体121流过磁通。而且,根据对第1线圈150a或第2线圈150b的通电状态而对上述的第1磁极部120a、第2磁极部120b和第3磁极部120c的极性进行切换。
[0151]
即,步进电机107a具有转子130、定子120、第1线圈150a和第2线圈150b。定子120对转子130提供产生旋转力的磁通。转子130被磁化为n极和s极的至少2极,使指针旋转。第1线圈150a向定子120的两端中的第1磁芯140a提供磁通。第2线圈150b向定子120的两端中的第2磁芯140b提供磁通。
[0152]
控制电路103所输出的驱动脉冲通过对第1线圈150a与第2线圈150b进行激励,使转子130驱动与极数对应的基准旋转角度。
[0153]
另外,这里所说的与极数对应的基准旋转角度也可以是转子130的旋转1圈的角度除以转子被磁化的极数而得到的角度。例如,在转子130被例示为2极的情况下,与极数对应的基准旋转角度是指旋转1圈的角度除以2而得到的角度(180
°
)。此外,在转子130被例示为4极的情况下,与极数对应的基准旋转角度是用旋转1圈的角度除以4而得到的角度(90
°
)。
[0154]
图13是示出第2实施方式中的摆动脉冲和驱动脉冲的一例的图。在该图的说明中,横轴表示时刻,“out1”表示各时刻的施加于第1端子out1的电压的大小,“out2”表示各时刻的施加于第2端子out2的电压的大小,“out3”表示各时刻的施加于第3端子out3的电压的大小,“out4”表示各时刻的施加于第4端子out4的电压的大小。
[0155]
此外,关于各时刻的转子的位置,将图12中说明的第2停止位置设为0度来对转子202的旋转位置进行说明。时刻t51到时刻t61的控制是使转子202从0度起沿逆时针方向旋转至180度的控制,时刻t61到时刻t69的控制是使转子202从180度起沿逆时针方向旋转至0度的控制。
[0156]
在时刻t51到时刻t52,步进电机控制装置100对第4端子out4施加正向的脉冲。当对第4端子out4持续施加了正向的脉冲时,转子130在旋转了45度的位置静止。当步进电机
控制装置100在时刻t52停止了脉冲的施加时,转子130被拉回0度的位置而静止。在此,转子130在从45度的位置返回0度的位置时,由于惯性而至少一次反复进行如下动作:沿逆时针方向旋转至负的旋转角度的位置,且沿顺时方向旋转至正的旋转角度的位置。即,转子130振动,由于振动衰减而在0度的位置静止。
[0157]
在时刻t52到时刻t55,步进电机控制装置100判定转子130由于摆动脉冲的施加而承受的机械负载。具体而言,判定电路104根据电压检测电路105检测到的电压,判定转子130所承受的机械负载。
[0158]
在时刻t55到时刻t57,步进电机控制装置100施加驱动脉冲。将在时刻t55到时刻t56对第4端子out4施加的正向的脉冲记作第1驱动脉冲。将在时刻t56到时刻t57对第2端子out2施加的正向的脉冲记作第2驱动脉冲。当对第2端子out2持续施加了正向的脉冲时,转子130在旋转了135度的位置静止。当步进电机控制装置100在时刻t57停止了脉冲的施加时,转子130被拉至180度的位置而静止。
[0159]
在时刻t61到时刻t62,步进电机控制装置100对第3端子out3施加正向的脉冲、即摆动脉冲。当对第3端子out3持续施加了正向的脉冲时,转子130在旋转了225度的位置静止。当步进电机控制装置100在时刻t62停止了脉冲的施加时,转子130被拉回180度的位置而静止。在此,转子130在从225度的位置返回180度的位置时振动,由于振动衰减而在180度的位置静止。
[0160]
在时刻t62到时刻t65中,步进电机控制装置100判定转子130由于摆动脉冲的施加而承受的机械负载。具体而言,判定电路104根据电压检测电路105检测到的电压,判定转子130所承受的机械负载。
[0161]
在时刻t65到时刻t67,步进电机控制装置100施加驱动脉冲。具体而言,步进电机控制装置100在时刻t65到时刻t66,对第3端子out3施加正向的脉冲作为第1驱动脉冲,在时刻t66到时刻t67,对第1端子out1施加正向的脉冲作为第2驱动脉冲。当对第1端子out1持续施加了正向的脉冲时,转子130在旋转了315度的位置静止。当步进电机控制装置100在时刻t66停止了脉冲的施加时,转子130被拉至0度的位置而静止。
[0162]
图14是示出第2实施方式中的摆动脉冲和驱动脉冲的变形例的图。在该图所示的变形例中,具有从静止位置起沿正转方向旋转规定角度的摆动脉冲(第1摆动脉冲)和从静止位置起沿反转方向旋转规定角度的摆动脉冲(第2摆动脉冲),在这一点上,与图13中说明的一例不同。在该图的说明中,横轴表示时刻,“out1”表示各时刻的施加于第1端子out1的电压的大小,“out2”表示各时刻的施加于第2端子out2的电压的大小,“out3”表示各时刻的施加于第3端子out3的电压的大小,“out4”表示各时刻的施加于第4端子out4的电压的大小。
[0163]
此外,关于各时刻的转子的位置,将图12中说明的第2停止位置设为0度来对转子202的旋转位置进行说明。时刻t51到时刻t61的控制是使转子202从0度起沿逆时针方向旋转至180度的控制,时刻t61到时刻t69的控制是使转子202从180度起沿逆时针方向旋转至0度的控制。
[0164]
在时刻t71到时刻t74,步进电机控制装置100施加摆动脉冲。具体而言,在时刻t71到时刻t72,步进电机控制装置100对第4端子out4施加正向的脉冲(第1摆动脉冲)。当对第4端子out4施加了正向的脉冲时,转子130朝向45度的位置开始旋转。当步进电机控制装置
100在时刻t72停止了脉冲的施加时,转子130朝向0度的位置开始旋转。接着,步进电机控制装置100对第1端子out1施加正向的脉冲(第2摆动脉冲)。当对第1端子out1施加了正向的脉冲,转子130朝向315度的位置开始旋转。在此,转子130在一次被拉到45度的位置之后,被拉到315度的位置,因此由于惯性而大幅振动。转子130由于振动衰减而在0度的位置静止。
[0165]
在时刻t74到时刻t75中,步进电机控制装置100判定转子130由于摆动脉冲的施加而承受的机械负载。具体而言,判定电路104根据电压检测电路105检测到的电压,判定转子130所承受的机械负载。
[0166]
时刻t75到时刻t81的控制与图13中说明的时刻t55到时刻t61的控制相同,因此省略说明。
[0167]
在时刻t81到时刻t84,步进电机控制装置100施加摆动脉冲。具体而言,在时刻t81到时刻t82,步进电机控制装置100对第3端子out3施加正向的脉冲(第1摆动脉冲)。当对第3端子out3施加了正向的脉冲时,转子130朝向225度的位置开始旋转。当步进电机控制装置100在时刻t82停止了脉冲的施加时,转子130朝向180度的位置开始旋转。接着,步进电机控制装置100对第2端子out2施加正向的脉冲(第2摆动脉冲)。当对第2端子out2施加了正向的脉冲,转子130朝向135度的位置开始旋转。在此,转子130在一次被拉到225度的位置之后,被拉到135度的位置,因此由于惯性而大幅振动。转子130由于振动衰减而在180度的位置静止。
[0168]
在时刻t84到时刻t85,步进电机控制装置100判定转子130由于摆动脉冲的施加而承受的机械负载。具体而言,判定电路104根据电压检测电路105检测到的电压,判定转子130所承受的机械负载。
[0169]
时刻t85到时刻t89的控制与图13中说明的时刻t65到时刻t69的控制相同,因此省略说明。
[0170]
另外,在上述的变形例所示的一例中,控制电路103能够通过输出第1摆动脉冲和第2摆动脉冲中的任意摆动脉冲来使转子130大幅振动,该第1摆动脉冲通过输出使转子130沿正转方向旋转的能量的脉冲来使转子130摆动,该第2摆动脉冲通过在输出第1摆动脉冲之后输出使转子130沿与正转方向相反的方向旋转的能量的脉冲来使转子130摆动。控制电路103可以如第2实施方式的一例那样仅将第1摆动脉冲作为摆动脉冲输出,也可以如第2实施方式的变形例那样将第1摆动脉冲和第2摆动脉冲作为摆动脉冲输出。
[0171]
在第1摆动脉冲和第2摆动脉冲均被输出的情况下,能够使转子130大幅振动,另一方面,检测所需的时间有时会延长。因此,也可以构成为在与输出驱动脉冲的规定的周期相应地输出摆动脉冲的情况下,仅输出第1摆动脉冲。此外,也可以构成为在按照不与输出驱动脉冲的规定的周期相对应的规定的定时输出摆动脉冲的情况下,第1摆动脉冲和第2摆动脉冲均被输出。
[0172]
另外,控制部103也可以构成为具有输出摆动脉冲的摆动脉冲输出模式和不输出摆动脉冲的摆动脉冲非输出模式。
[0173]
[实施方式的效果的总结]
[0174]
根据上述的实施方式,步进电机控制装置100具有:控制电路103,其输出驱动脉冲和摆动脉冲;电压检测电路105,其检测转子的振动;以及判定电路104,其根据检测到的电压,判定转子所承受的机械负载,由此该步进电机控制装置100检测输出了摆动脉冲时的转
子的振动。因此,根据本实施方式,即使在转子的振动根据电机而较小的情况下,也能够使转子振动,由于产生感应电压,因此能够进行转子的旋转状态的检测,能够判定转子的机械负载。
[0175]
以往,在电机结构为2线圈电机的情况下,感应电压分散于2个线圈,另外,线圈的电磁制动的效果增强,因此,通常驱动中的转子的振动会变小。但是,根据本实施方式,由于施加用于使转子振动的摆动脉冲,因此能够可靠地进行转子的旋转状态的检测,能够判定转子的机械负载。
[0176]
此外,根据电机的不同,存在转子的惯性小或者定子的磁保持力小的情况。在这样的情况下,通常驱动中的转子的振动变小,难以进行转子的旋转状态的检测。但是,根据本实施方式,由于施加用于使转子振动的摆动脉冲,因此能够可靠地进行转子的旋转状态的检测,能够判定转子的机械负载。
[0177]
另外,步进电机控制装置100所判定的机械负载不限于齿轮具有负载齿的情况的一例,广泛包含在使换日齿轮旋转的情况下产生的负载等。
[0178]
根据上述的实施方式,控制电路103在输出了摆动脉冲之后,经过了规定的期间后输出驱动脉冲。因此,控制电路103在由于摆动脉冲引起的转子的振动充分衰减之后输出驱动脉冲,因此能够抑制因由于摆动脉冲引起的振动而失步。
[0179]
另外,从摆动脉冲的输出到驱动脉冲的输出为止的规定的期间也可以是足以使由于摆动脉冲引起的转子的振动衰减的时间,根据转子的惯性来确定。
[0180]
根据上述的实施方式,步进电机控制装置100将小齿轮与负载齿啮合的状态检测为机械负载。因此,根据本实施方式,能够确定基准指针位置。
[0181]
根据上述的实施方式,控制电路103根据由判定电路104判定出的机械负载而控制驱动脉冲的输出时间。因此,通过在机械负载增大的情况下延长施加驱动脉冲的时间(即,提供较大的能量),能够抑制步进电机失步。
[0182]
例如,在对日历进行驱动时,负载增大,因此,优选通过比通常大的能量使转子旋转。根据本实施方式,即使在这样的情况下,也能够根据负载而使提供的能量可变。
[0183]
根据上述的实施方式,步进电机控制装置100具有第1摆动脉冲和第2摆动脉冲。在此,在对步进电机进行驱动的情况下,根据驱动的速度、所连结的负载的大小,存在优选仅提供第1摆动脉冲的情况和优选提供第1摆动脉冲和第2摆动脉冲的情况。根据本实施方式,能够根据步进电机的驱动的速度、所连结的负载的大小而提供适当的摆动脉冲。
[0184]
根据上述的实施方式,步进电机控制装置100在通常走针的情况下,施加第1摆动脉冲和第2摆动脉冲,由此能够抑止机械负载的错误检测。此外,步进电机控制装置100在对指针进行高速驱动等的情况下,通过仅施加第1摆动脉冲,能够缩短检测时间并使指针高速驱动。
[0185]
根据上述的实施方式,判定电路104根据由电压检测电路105检测到的电压的值是否超过阈值,判定机械负载。因此,根据本实施方式,能够容易地检测转子的机械负载。
[0186]
根据上述的实施方式,在提供了摆动脉冲之后,在由于转子的振动而可能产生感应电压的定时,判定电路104判定是否产生了感应电压。因此,根据本实施方式,能够抑制在如负载因外部负载而暂时变大的情况下产生的错误检测。
[0187]
根据上述的实施方式,步进电机控制装置100具有输出摆动脉冲的模式和不输出
摆动脉冲的模式。因此,根据本实施方式,在不需要摆动脉冲的情况下,不输出摆动脉冲,由此能够减少功耗。
[0188]
[第3实施方式]
[0189]
接着,参照图15到图18,对第3实施方式进行说明。在上述的实施方式中,对由步进电机控制装置100变更驱动脉冲的能量的情况的一例进行了说明。具体而言,对控制电路103通过根据由判定电路104判定出的机械负载而控制驱动脉冲的输出时间来控制驱动脉冲的能量的情况的一例进行了说明。在第3实施方式中,对通过各种各样的方法控制对步进电机107进行驱动的能量的情况的具体一例进行说明。
[0190]
另外,在参照图15到图18来说明的一例中,对步进电机为2线圈电机的情况的一例进行说明。但是,第3实施方式不限于2线圈电机的一例。即使在钟表1具有1线圈电机替代2线圈电机的情况下,也能够应用与后述的处理相同的处理。
[0191]
图15是示出第3实施方式中的通过控制驱动脉冲的输出时间来控制对步进电机进行驱动的能量的情况的一例的图。参照该图,对通过控制驱动脉冲的输出时间来控制对步进电机进行驱动的能量的情况的一例进行说明。图15的(a)示出能够进行感应电压检测的情况的一例,图15的(b)示出未能进行感应电压检测的情况的一例。
[0192]
在图15的说明中,横轴表示时刻,“out1”表示各时刻的施加于第1端子out1的电压的大小,“out2”表示各时刻的施加于第2端子out2的电压的大小,“out3”表示各时刻的施加于第3端子out3的电压的大小,“out4”表示各时刻的施加于第4端子out4的电压的大小。
[0193]
首先,参照图15的(a),对能够进行感应电压检测的情况的一例进行说明。
[0194]
在时刻t111,步进电机控制装置100通过控制“out4”,对步进电机107施加摆动脉冲。步进电机控制装置100判定转子130由于摆动脉冲的施加而承受的机械负载。电压检测电路105检测在“out4”中产生的感应电压。判定电路104根据电压检测电路105检测到的电压,判定转子130所承受的机械负载。具体而言,判定电路104由于感应电压为规定的阈值th以上,因此判定为能够正常地检测到感应电压。
[0195]
接着,参照图15的(b),对未能进行感应电压检测的情况的一例进行说明。
[0196]
在时刻t121,步进电机控制装置100通过控制“out4”,对步进电机107施加摆动脉冲。步进电机控制装置100判定转子130由于摆动脉冲的施加而承受的机械负载。电压检测电路105检测在“out4”中产生的感应电压。判定电路104由于感应电压为规定的阈值th以下,因此,判定为未能正常地检测到感应电压。在该情况下,控制电路103通过控制驱动脉冲的输出时间,控制对步进电机107进行驱动的能量。具体而言,控制电路103通过将在时刻125对“out1”施加的驱动脉冲的输出时间以及在时刻127对“out3”施加的驱动脉冲的输出时间控制得较长,进行控制以使对步进电机107进行驱动的能量变大。
[0197]
图16是示出第3实施方式中的通过控制步进电机的激励方法来控制对步进电机进行驱动的能量的情况的一例的图。参照该图,对通过控制步进电机的激励方法来控制对步进电机进行驱动的能量的情况的一例进行说明。图16的(a)示出能够进行感应电压检测的情况的一例,图16的(b)示出未能进行感应电压检测的情况的一例。
[0198]
在图16的说明中,横轴表示时刻,“out1”表示各时刻的施加于第1端子out1的电压的大小,“out2”表示各时刻的施加于第2端子out2的电压的大小,“out3”表示各时刻的施加于第3端子out3的电压的大小,“out4”表示各时刻的施加于第4端子out4的电压的大小。
[0199]
接着,参照图16的(a),对能够进行感应电压检测的情况的一例进行说明。
[0200]
在时刻t221,步进电机控制装置100通过控制“out4”,对步进电机107施加摆动脉冲。步进电机控制装置100判定转子130由于摆动脉冲的施加而承受的机械负载。电压检测电路105检测在“out4”中产生的感应电压。判定电路104根据电压检测电路105检测到的电压,判定转子130所承受的机械负载。具体而言,判定电路104由于感应电压为规定的阈值th以上,因此判定为能够正常地检测到感应电压。
[0201]
在图16的(a)所示的一例中,控制电路103通过1相激励对步进电机107进行了控制。
[0202]
接着,参照图16的(b),对未能进行感应电压检测的情况的一例进行说明。
[0203]
在时刻t221,步进电机控制装置100通过控制“out4”,对步进电机107施加摆动脉冲。步进电机控制装置100判定转子130由于摆动脉冲的施加而承受的机械负载。电压检测电路105检测在“out4”中产生的感应电压。判定电路104由于感应电压为规定的阈值th以下,因此,判定为未能正常地检测到感应电压。在该情况下,控制电路103通过控制步进电机107的激励方法,控制对步进电机107进行驱动的能量。具体而言,控制电路103通过将步进电机107的激励方法从1相激励控制为2相激励,控制对步进电机107进行驱动的能量。更具体而言,控制电路103通过在时刻225施加“out1”和“out3”,并仅在时刻227施加“out3”,设为2相激励驱动,进行控制以使对步进电机107进行驱动的能量变大。
[0204]
图17是第3实施方式中的通过控制驱动脉冲的占空比来控制对步进电机进行驱动的能量的情况的一例的图。参照该图,对通过控制驱动脉冲的占空比来控制对步进电机进行驱动的能量的情况的一例进行说明。图17的(a)示出能够进行感应电压检测的情况的一例,图17的(b)示出未能进行感应电压检测的情况的一例。
[0205]
另外,该图所示的一例中,控制电路103通过施加pwm信号作为驱动脉冲,对步进电机107进行了控制。
[0206]
在图17的说明中,横轴表示时刻,“out1”表示各时刻的施加于第1端子out1的电压的大小,“out2”表示各时刻的施加于第2端子out2的电压的大小,“out3”表示各时刻的施加于第3端子out3的电压的大小,“out4”表示各时刻的施加于第4端子out4的电压的大小。
[0207]
接着,参照图17的(a),对能够进行感应电压检测的情况的一例进行说明。
[0208]
在时刻t321,步进电机控制装置100通过控制“out4”,对步进电机107施加摆动脉冲。步进电机控制装置100判定转子130由于摆动脉冲的施加而承受的机械负载。电压检测电路105检测在“out4”中产生的感应电压。判定电路104根据电压检测电路105检测到的电压,判定转子130所承受的机械负载。具体而言,判定电路104由于感应电压为规定的阈值th以上,因此判定为能够正常地检测到感应电压。
[0209]
在图17的(a)所示的一例中,控制电路103通过在时刻315和时刻317施加pwm信号作为驱动脉冲,对步进电机107进行了控制。
[0210]
接着,参照图17的(b),对未能进行感应电压检测的情况的一例进行说明。
[0211]
在时刻t321,步进电机控制装置100通过控制“out4”,对步进电机107施加摆动脉冲。步进电机控制装置100判定转子130由于摆动脉冲的施加而承受的机械负载。电压检测电路105检测在“out4”中产生的感应电压。判定电路104由于感应电压为规定的阈值th以下,因此,判定为未能正常地检测到感应电压。在该情况下,控制电路103通过控制驱动脉冲
的占空比,控制对步进电机107进行驱动的能量。具体而言,控制电路103通过使在时刻325和时刻327要施加的驱动脉冲的占空比比在时刻315和时刻317所施加的驱动脉冲的占空比大,进行控制以使对步进电机107进行驱动的能量变大。
[0212]
图18是第3实施方式中的通过控制驱动脉冲的电压来控制对步进电机进行驱动的能量的情况的一例的图。参照该图,对通过控制驱动脉冲的占空比来控制对步进电机进行驱动的能量的情况的一例进行说明。图18的(a)示出能够进行感应电压检测的情况的一例,图18的(b)示出未能进行感应电压检测的情况的一例。
[0213]
另外,在本实施方式中,电机驱动电路106具有未图示的dc/dc转换器、ldo(low dropout:低压差)等电压转换器,具有能够选择对步进电机107施加的电压的结构。
[0214]
在图18的说明中,横轴表示时刻,“out1”表示各时刻的施加于第1端子out1的电压的大小,“out2”表示各时刻的施加于第2端子out2的电压的大小,“out3”表示各时刻的施加于第3端子out3的电压的大小,“out4”表示各时刻的施加于第4端子out4的电压的大小。
[0215]
接着,参照图18的(a),对能够进行感应电压检测的情况的一例进行说明。
[0216]
在时刻t411,步进电机控制装置100通过控制“out4”,对步进电机107施加摆动脉冲。步进电机控制装置100判定转子130由于摆动脉冲的施加而承受的机械负载。电压检测电路105检测在“out4”中产生的感应电压。判定电路104根据电压检测电路105检测到的电压,判定转子130所承受的机械负载。具体而言,判定电路104由于感应电压为规定的阈值th以上,因此判定为能够正常地检测到感应电压。
[0217]
在图17的(a)所示的一例中,控制电路103通过在时刻415和时刻417施加电压v1作为驱动脉冲,对步进电机107进行了控制。
[0218]
接着,参照图18的(b),对未能进行感应电压检测的情况的一例进行说明。
[0219]
在时刻t421,步进电机控制装置100通过控制“out4”,对步进电机107施加摆动脉冲。步进电机控制装置100判定转子130由于摆动脉冲的施加而承受的机械负载。电压检测电路105检测在“out4”中产生的感应电压。判定电路104由于感应电压为规定的阈值th以下,因此,判定为未能正常地检测到感应电压。在该情况下,控制电路103通过控制驱动脉冲的电压,控制对步进电机107进行驱动的能量。具体而言,控制电路103通过将在时刻415和时刻417要施加的驱动脉冲的电压设为比电压v1大的电压v2,进行控制以使对步进电机107进行驱动的能量变大。
[0220]
例如,也可以是,电压v1是由电压转换器生成的电压,电压v2是电池的电源电压。
[0221]
[第3实施方式的效果的总结]
[0222]
根据上述的实施方式,步进电机控制装置100具备控制电路103,由此根据由判定电路104判定出的机械负载而控制对步进电机107进行驱动的能量。因此,根据本实施方式,在机械负载增大的情况下,通过增大对步进电机107进行驱动的能量,能够抑制步进电机失步。
[0223]
此外,根据上述的实施方式,在由判定电路104判定为未能正常地检测到感应电压的情况下,控制电路103通过控制驱动脉冲的输出时间,控制对步进电机107进行驱动的能量。控制电路103通过控制驱动脉冲的输出时间,控制对步进电机107进行驱动的能量,因此能够在不使用用于使能量可变的新硬件的情况下,容易地控制对步进电机107进行驱动的能量。
[0224]
此外,根据上述的实施方式,在由判定电路104判定为未能正常地检测到感应电压的情况下,控制电路103通过控制步进电机107的激励方法,控制对步进电机107进行驱动的能量。控制电路103通过控制步进电机107的激励方法来控制对步进电机107进行驱动的能量,因此能够在不使用用于使能量可变的新硬件的情况下,容易地控制对步进电机107进行驱动的能量。此外,控制电路103能够可靠地控制对步进电机107进行驱动的能量。
[0225]
此外,根据上述的实施方式,在由判定电路104判定为未能正常地检测到感应电压的情况下,控制电路103通过控制驱动脉冲的占空比,控制对步进电机107进行驱动的能量。控制电路103通过控制驱动脉冲的占空比,控制对步进电机107进行驱动的能量,因此即使在对驱动脉冲进行pwm驱动的情况下,也能够控制对步进电机107进行驱动的能量。
[0226]
此外,根据上述的实施方式,在由判定电路104判定为未能正常地检测到感应电压的情况下,控制电路103通过控制驱动脉冲的电压,控制对步进电机107进行驱动的能量。控制电路103通过控制驱动脉冲的电压来控制对步进电机107进行驱动的能量,因此即使在存在能够施加驱动脉冲的时间的时间限制的情况下,也能够控制对步进电机107进行驱动的能量。
[0227]
另外,在本实施方式中,也能够组合上述的方法。例如,可以进行控制以使同时变更驱动脉冲的施加时间和电压双方,也可以进行控制以使同时变更pwm的占空比和电压双方。此外,也可以在变更为2相激励时,进行控制以使同时变更驱动脉冲的施加时间和电压中的至少一方。
[0228]
通过组合这些,能够通过更高的分辨率控制对步进电机107进行驱动的能量。
[0229]
[第4实施方式]
[0230]
接着,参照图19,对第4实施方式进行说明。在上述的实施方式中,参照图14,对摆动脉冲的变形例进行了说明。在第4实施方式中,补充说明参照图14所说明的摆动脉冲的变形例。
[0231]
图19是示出第4实施方式中的摆动脉冲和驱动脉冲的一例的图。参照该图来说明的一例不限定摆动脉冲的旋转方向,在这一点上,与参照图14所说明的一例不同。
[0232]
在参照图14所说明的一例中,在通过第1摆动脉冲使转子130沿正转方向旋转后,通过第2摆动脉冲使其沿反转方向旋转。但是,在本实施方式中,也可以在通过第1摆动脉冲使转子130沿反转方向旋转,通过第2摆动脉冲使之沿反转方向旋转。
[0233]
在本实施方式中,摆动脉冲为第1摆动脉冲或第2摆动脉冲中的任意摆动脉冲,在这一点上,与参照图14所说明的一例没有差异。但是,在本实施方式中,不限定第1摆动脉冲或第2摆动脉冲的旋转方向,在这一点上,与参照图14所说明的一例不同。即,第1摆动脉冲具有使转子130沿第1旋转方向旋转的能量,使转子130摆动。第2摆动脉冲是在输出第1摆动脉冲后施加的摆动脉冲,具有使转子130沿第2旋转方向旋转的能量,使转子130摆动。
[0234]
具体而言,也可以是,第1旋转方向是正转方向,第2旋转方向是与第1旋转方向相反方向的反转方向。此外,也可以是,第1旋转方向是反转方向,第2旋转方向是与第1旋转方向相反方向的正转方向。
[0235]
[第4实施方式的效果的总结]
[0236]
根据上述的实施方式,控制电路103施加第1摆动脉冲和第2摆动脉冲作为驱动脉冲,第1摆动脉冲和第2摆动脉冲的旋转方向是任意的。因此,根据本实施方式,能够使步进
电机107的转子适当地摆动。
[0237]
[第5实施方式]
[0238]
接着,对第5实施方式进行说明。首先,对第5实施方式应解决的课题进行说明。上述的实施方式中说明的摆动脉冲需要在与负载齿啮合时,转子不大幅振动,而在与通常齿啮合时,施加适合于转子摆动的能量。
[0239]
例如,若摆动脉冲的能量过大,则即使是负载齿也会摆动,若摆动脉冲的能量过小,则存在即使是通常齿也不摆动的情况。即,期望通过齿轮的负载来适当地调整摆动脉冲的能量。在本实施方式中,目的在于能够适当地调整摆动脉冲的能量。
[0240]
图20是使第5实施方式中的驱动脉冲和摆动脉冲的电压发生了变化的情况下的感应电压的检测有无的图。在图中左侧,将负载齿的弹簧力较强的情况的一例表示为“高负载”。在图中左侧,将负载齿的弹簧力弱的情况的一例表示为“低负载”。关于“高负载”和“低负载”各自的情况,分别示出将摆动脉冲的施加电压设为“3.0[v]”的情况的一例和设为“1.8[v]”的情况的一例。3.0[v]设想了电源电压,1.8[v]设想了通过dc/dc转换器、ldo等从电源电压生成的电压。
[0241]
图中纵轴表示摆动脉冲的能量的大小,表示越往上侧能量越小,越往下侧能量越大。在图中所示的一例中,例如,通过使施加摆动脉冲的时间发生变化,使能量不同。另外,在设为“3.0[v]”的情况的一例和设为“1.8[v]”的情况的一例中,能量不同。
[0242]
此外,在图中,横轴表示步,1单元表示1步。在该图中,示出了将以360步转1圈的齿轮中的、将负载齿设为中心的11步。
[0243]
图中的带阴影的单元表示被检测为负载齿。图中的未带阴影的单元表示被检测为通常齿。带阴影的单元与未带阴影的单元的边界表示摆动脉冲的最小能量和最大能量。即,通过施加最小能量与最大能量之间的能量作为摆动脉冲,能够适当地检测通常齿和负载齿。
[0244]
当观察“高负载”的情况的一例时,在以3.0[v]对摆动脉冲进行了驱动的情况下,最小能量与最大能量之差(即,脉冲的施加时间之差)为0.27[ms]。在以1.8[v]对摆动脉冲进行了驱动的情况下,最小能量与最大能量之差为0.78[ms]。
[0245]
当观察“低负载”的情况的一例时,在以3.0[v]对摆动脉冲进行了驱动的情况下,最小能量与最大能量之差是0.18[ms]。在以1.8[v]对摆动脉冲进行了驱动的情况下,最小能量与最大能量之差为0.56[ms]。
[0246]
无论是在“高负载”的情况下,还是在“低负载”的情况下,在以1.8[v]对摆动脉冲进行了驱动的情况下,最小能量与最大能量之差较大。即,通过将摆动脉冲设为比驱动脉冲小的电压,能够以较高的分辨率控制摆动脉冲的能量。
[0247]
在本实施方式中,由于以较高的分辨率控制摆动脉冲的能量,因此将摆动脉冲设为比驱动脉冲小的电压。具体而言,电机驱动电路106在从控制电路103输出了驱动脉冲的情况下,通过第1电压(例如3.0[v])对步进电机107进行驱动,在从控制电路103输出了摆动脉冲的情况下,通过比第1电压低的第2电压(例如1.8[v])对步进电机107进行驱动。
[0248]
也可以是,第1电压例如是对钟表1进行驱动的电池的电源电压,第2电压例如是通过dc/dc转换器、ldo等使电池的电源电压下降后的电压。
[0249]
[第5实施方式的效果的总结]
[0250]
根据本实施方式,通过将摆动脉冲设为比驱动脉冲小的电压,能够以较高的分辨率控制摆动脉冲的能量。因此,能够适当地控制摆动脉冲的能量。因此,根据本实施方式,能够准确地检测通常齿和负载齿。
[0251]
[第6实施方式]
[0252]
接着,说明第6实施方式。首先,对第6实施方式的步进电机控制装置100要解决的课题进行说明。
[0253]
钟表1所具备的多个轮系组有时因长年的使用而导致负载变大。此外,即使在使用期间较短的情况下,根据使用状况、磁场环境的不同,也存在整体上负载变大的情况。在本实施方式中,在钟表1所具备的轮系的负载增大的情况下,通过进行控制以使对步进电机107进行驱动的能量变大,欲抑制失步等不良情况。
[0254]
图21是说明第6实施方式中的驱动脉冲等级控制的图。参照该图,对第6实施方式的步进电机控制装置100的一系列动作进行说明。
[0255]
另外,本实施方式中说明的齿轮将以360[step]旋转一圈作为前提来进行说明。此外,本实施方式中说明的处理在接通电源时开始,之后,反复进行控制。
[0256]
(步骤s211)作为初始条件,步进电机控制装置100将驱动等级dr设定为0,将稳定次数ns设定为0。驱动等级dr表示对步进电机107进行驱动的能量的等级。驱动等级dr越大,表示对步进电机107进行驱动的能量越大。稳定次数ns是指每1步递增的计数器。步进电机控制装置100通过参考稳定次数ns,判定是否应该变更驱动等级dr。
[0257]
(步骤s213)步进电机控制装置100在被接通了电源之后,使齿轮转1圈(即,360[step]),确定负载齿的位置。步进电机控制装置100在存储了负载齿的位置之后,使处理进入步骤s215。
[0258]
(步骤s215)步进电机控制装置100判定是否位于所存储的负载齿的位置。步进电机控制装置100在位于所存储的负载齿的位置的情况下(步骤215;是),使处理进入步骤s217。步进电机控制装置100在不位于所存储的负载齿的位置的情况下(步骤215;否),使处理进入步骤s221。
[0259]
(步骤s217)步进电机控制装置100对步进电机107施加摆动脉冲。
[0260]
(步骤s219)步进电机控制装置100对步进电机107施加驱动脉冲。
[0261]
即,由于在负载齿的位置处无法取得感应电压,因此不进行驱动等级的控制。
[0262]
步进电机控制装置100通过进行步骤s221到步骤s241的处理,根据判定出通常齿的感应电压vrs的结果来控制作为驱动脉冲的等级的驱动等级dr。
[0263]
(步骤s221)步进电机控制装置100对步进电机107施加摆动脉冲。
[0264]
(步骤s223)步进电机控制装置100判定通常齿的感应电压vrs是否比规定的阈值vcomp大。步进电机控制装置100在通常齿的感应电压vrs比规定的阈值vcomp大的情况下(步骤223;是),使处理进入步骤s225。此外,在通常齿的感应电压vrs为规定的阈值vcomp以下的情况下(步骤223;否),使处理进入步骤s235。
[0265]
(步骤s225)步进电机控制装置100判定驱动等级dr是否为0。在驱动等级dr为0的情况下(步骤225;是),步进电机控制装置100使处理进入步骤s233。在驱动等级dr不为0的情况下(步骤225;否),步进电机控制装置100使处理进入步骤s227。
[0266]
(步骤s227)步进电机控制装置100使稳定次数ns增加1。
[0267]
(步骤s229)步进电机控制装置100判定稳定次数ns是否为360。在稳定次数ns为360的情况下(步骤229;是),步进电机控制装置100使处理进入步骤s231。在稳定次数ns不为360的情况下(步骤229;否),步进电机控制装置100使处理进入步骤s233。
[0268]
(步骤s231)步进电机控制装置100从驱动等级dr减去1。即,步进电机控制装置100在下次以后以更小的能量对步进电机107进行驱动。步进电机控制装置100将稳定次数ns设定为0。
[0269]
(步骤s233)步进电机控制装置100维持驱动等级dr。
[0270]
(步骤s235)步进电机控制装置100对驱动等级dr加上1。即,步进电机控制装置100在下次以后以更大的能量对步进电机107进行驱动。步进电机控制装置100将稳定次数ns设定为0。
[0271]
(步骤s241)步进电机控制装置100对步进电机107施加驱动脉冲。
[0272]
[第6实施方式的效果的总结]
[0273]
根据上述的实施方式,步进电机控制装置100具备控制电路103,由此在感应电压vrs比规定的阈值vcomp小的情况下,增大驱动脉冲的等级。即,在由判定电路104判定出的转子所承受的机械负载比规定的阈值小的情况下,控制电路103施加能量不同的多个等级的驱动脉冲中的、等级比上一次施加的驱动脉冲大的驱动脉冲。
[0274]
此外,步进电机控制装置100具备控制电路103,由此在感应电压vrs比规定的阈值vcomp大的情况下,在稳定次数ns经过了与齿轮大约转1圈对应的次数之后,减小驱动脉冲的等级。即,在连续规定次数以上得到了由判定电路104判定出的转子所承受的机械负载比规定的阈值大的结果的情况下,控制电路103施加能量不同的多个等级的驱动脉冲中的、等级比上一次施加的驱动脉冲小的驱动脉冲。
[0275]
根据上述的实施方式,即使在钟表1所具备的轮系的负载增大的情况下,通过进行控制以使对步进电机107进行驱动的能量变大,也能够抑止失步等不良情况。
[0276]
此外,在减小驱动脉冲的能量的情况下,在判定了与齿轮转1圈对应的负载之后进行偏转,因此能够抑制由于错误地减小驱动脉冲的能量而产生失步等问题。
[0277]
[第7实施方式]
[0278]
接着,说明第7实施方式。首先,对第7实施方式的步进电机控制装置100要解决的课题进行说明。
[0279]
如上所述,摆动脉冲通过使转子摆动,检测机械负载。特别是,关于具有通常齿和负载齿的齿轮,通过机械负载的检测,能够判定是与通常齿啮合、还是与负载齿啮合。在此,当摆动脉冲的能量过大时,即使在与负载齿啮合的情况下,转子有时也会摆动。此外,当摆动脉冲的能量过小时,即使在与通常齿啮合的情况下,有时也不摆动。因此,要求使摆动脉冲的能量成为适当的能量。在本实施方式中,将摆动脉冲的能量调整为适当的能量。
[0280]
图22是说明第7实施方式中的摆动脉冲等级控制的图。参照该图,对第7实施方式的步进电机控制装置100的一系列动作进行说明。
[0281]
另外,关于本实施方式中说明的齿轮,设想了在粗调用的齿轮和微调用的齿轮分别设置1个齿的负载齿的情况。将粗调用的齿轮以360[step]旋转一圈、微调用的齿轮以45[step]旋转一圈作为前提来进行说明。即,在粗调用的齿轮旋转1圈的期间,微调用的齿轮旋转8圈。
[0282]
此外,本实施方式中说明的处理在接通电源时开始,之后,反复进行控制。
[0283]
(步骤s311)作为初始条件,步进电机控制装置100将摆动等级sr设定为0,将走针次数nd设定为0,将负载次数nr设定为0。摆动等级sr表示利用摆动脉冲使转子摆动时的能量的等级。摆动等级sr越大,表示能量越大。走针次数nd是指每1步递增的计数器。走针次数nd包含通常齿和负载齿,在这一点上与稳定次数ns不同。负载次数nr是指在齿轮转1圈的期间被判定为负载齿的次数。
[0284]
(步骤s313)步进电机控制装置100在被接通了电源之后,使齿轮转1圈(即,360[step]),确定负载齿的位置。步进电机控制装置100在存储了负载齿的位置之后,使处理进入步骤s315。
[0285]
(步骤s315)步进电机控制装置100判定走针次数nd是否为360。在走针次数nd为360的情况下(步骤315;是),步进电机控制装置100使处理进入步骤s331。在走针次数nd不为360的情况下(步骤315;否),步进电机控制装置100使处理进入步骤s317。
[0286]
(步骤s317)步进电机控制装置100对步进电机107施加摆动脉冲。
[0287]
(步骤s319)步进电机控制装置100判定感应电压vrs是否比规定的阈值vcomp大。在感应电压vrs比规定的阈值vcomp大的情况下(步骤319;是),步进电机控制装置100使处理进入步骤s323。此外,在感应电压vrs为规定的阈值vcomp以下的情况下(步骤319;否),使处理进入步骤s321。
[0288]
(步骤s321)步进电机控制装置100对负载次数nr进行递增。即,步进电机控制装置100对被判定为负载齿的次数进行计数。
[0289]
(步骤s323)步进电机控制装置100对步进电机107施加驱动脉冲。
[0290]
(步骤s325)步进电机控制装置100对走针次数nd进行递增。
[0291]
(步骤s331)步进电机控制装置100判定负载次数nr是否比负载次数最大值nrmax大。在负载次数nr比负载次数最大值nrmax大的情况下(步骤331;是),步进电机控制装置100使处理进入步骤s341。此外,在负载次数nr为负载次数最大值nrmax以下的情况下(步骤331;否),使处理进入步骤s333。
[0292]
(步骤s333)步进电机控制装置100判定负载次数nr是否比负载次数最小值nrmin小。在负载次数nr比负载次数最小值nrmin小的情况下(步骤333;是),步进电机控制装置100使处理进入步骤s343。此外,在负载次数nr为负载次数最小值nrmin以上的情况下(步骤333;否),使处理进入步骤s345。
[0293]
负载次数最大值nrmax例如为28,负载次数最小值nrmin例如为9。在本实施方式中,在粗调用的齿轮旋转1圈的期间,微调用的齿轮旋转8圈,因此,在粗调用的齿轮旋转1圈的期间(360[step])、判定至少9次的负载齿。因此,将负载次数最小值nrmin设定为9。此外,由于存在连续地检测多次感应电压作为负载齿的情况,因此设为每1齿检测3次左右,将负载次数最大值nrmax设定为28。
[0294]
另外,负载次数最大值nrmax和负载次数最小值nrmin的数量是任意的,例如可以根据负载齿的齿轮的步数来确定。
[0295]
(步骤s341)步进电机控制装置100对摆动等级sr加上1。即,步进电机控制装置100在下次以后施加更大能量的摆动脉冲。
[0296]
(步骤s343)步进电机控制装置100从摆动等级sr减去1。即,步进电机控制装置100
在下次以后施加更小能量的摆动脉冲。
[0297]
(步骤s345)步进电机控制装置100判断为摆动脉冲的能量是适当的。步进电机控制装置100将检测到的负载位置与步骤s313中所存储的负载位置进行对照。
[0298]
(步骤s351)在检测到的位置与所存储的位置一致的情况下(步骤351;是),步进电机控制装置100使处理进入步骤s361。此外,在检测到的位置与所存储的位置不一致的情况下(步骤351;否),使处理进入步骤s353。
[0299]
(步骤s353)步进电机控制装置100将负载齿的位置从所存储的位置修改为检测到的位置。
[0300]
(步骤s361)步进电机控制装置100将走针次数nd和负载次数nr设定为0。
[0301]
[第7实施方式的效果的总结]
[0302]
根据上述的实施方式,步进电机控制装置100具备控制电路103,由此根据在齿轮旋转1圈的期间被判定为负载齿的次数,控制摆动脉冲的等级。即,在具有负载齿的齿轮旋转了1圈的情况下,步进电机控制装置100根据由判定电路104判定为转子所承受的机械负载比规定的阈值大的次数,选择施加能量不同的多个等级的摆动脉冲中的、哪一个等级的摆动脉冲。
[0303]
根据上述的实施方式,即使在钟表1所具备的轮系的负载发生了变动的情况下,步进电机控制装置100通过控制摆动脉冲的能量,也能够使摆动脉冲的能量成为适当的能量。因此,根据本实施方式,能够准确地判定机械负载。
[0304]
[第8实施方式]
[0305]
接着,说明第8实施方式。在第8实施方式中,组合进行第6实施方式中说明的处理和第7实施方式中说明的处理。参照图23,对第8实施方式中的处理进行说明。
[0306]
图23是说明组合了第8实施方式中的驱动脉冲等级控制和摆动脉冲控制的情况的一例的图。针对第8实施方式中的处理,有时通过对与第6实施方式中说明的处理和第7实施方式中说明的处理相同的处理标注相同的标号来省略说明。针对第6实施方式中说明的处理,记作步骤s200,针对第7实施方式中说明的处理,记作步骤s300。
[0307]
(步骤s411)作为初始条件,步进电机控制装置100将摆动等级sr设定为0,将驱动等级dr设定为0,将走针次数nd设定为0,将负载次数nr设定为0,将稳定次数ns设定为0,将搜索s设定为0。在第8实施方式中,具有搜索s,在这一点上,与第6实施方式和第7实施方式中说明的处理不同。
[0308]
在控制摆动脉冲的等级的期间,无法正确地知道针是否一致,因此不进行驱动脉冲的控制。即,关于搜索s,在对摆动脉冲的等级和驱动脉冲的等级均进行控制的情况下,该搜索s具有作为表示对摆动脉冲的等级进行控制的期间的标志的作用。
[0309]
(步骤s421)步进电机控制装置100在不是所存储的负载位置的情况下,判定搜索s是否为0。搜索s为0的情况表示未判定出摆动脉冲的等级的状态。在搜索s不为0的情况下(即,步骤s421;否),使处理进入步骤s319,不进行驱动等级的控制。在搜索s为0的情况下(即,步骤s421;是),使处理进入步骤s223,进行驱动等级的控制。
[0310]
(步骤s431)步进电机控制装置100对负载次数nr进行递增。即,步进电机控制装置100对被判定为负载齿的次数进行计数。是与第7实施方式中的步骤s321相同的处理。
[0311]
步进电机控制装置100在步骤s451到步骤455中,进行搜索s的设定。
[0312]
(步骤s451)步进电机控制装置100将搜索s设定为1。(步骤s453)步进电机控制装置100将搜索s设定为0。(步骤s455)步进电机控制装置100将搜索s设定为0。
[0313]
[第8实施方式的效果的总结]
[0314]
根据上述的实施方式,步进电机控制装置100在进行摆动脉冲的等级控制的期间,将搜索s设定为1,在搜索s为1的情况下,不进行驱动脉冲的控制。即,步进电机控制装置100在对摆动脉冲的等级进行控制的期间,不进行驱动脉冲的控制。
[0315]
因此,根据上述的实施方式,能够防止如步进电机控制装置100在对摆动脉冲的等级进行控制的期间错误地决定了驱动脉冲的等级的情况。
[0316]
另外,上述的钟表1所具备的功能的全部或一部分也可以作为程序记录在计算机能读取的记录介质中,由计算机系统来执行该程序。“计算机系统”包含os、外围设备等硬件。此外,计算机能读取的记录介质例如是软盘、磁光盘、rom(read only memory:只读存储器)、cd-rom等可移动介质、内置在计算机系统中的硬盘等存储装置、互联网等网络上的服务器等所具备的易失性存储器(ram,random access memory:随机存储存储器)。另外,易失性存储器是以一定时间保持程序的记录介质的一例。
[0317]
此外,上述程序也可以通过传输介质、例如互联网等网络、电话线路等通信线路传输到其他计算机系统。
[0318]
此外,上述程序也可以是实现上述功能的全部或一部分的程序。另外,实现上述功能的一部分的程序也可以是能够通过与计算机系统中预先记录的程序的组合实现上述功能的程序、所谓的差分程序。
[0319]
以上,参照附图对本发明的实施方式进行了说明,但具体结构并不限于上述实施方式,还包括不脱离本发明的宗旨的范围内的设计变更等。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。