1.本发明涉及一种应用于多飞行器编队飞行的低成本决策与控制系统,属于无人机领域。
背景技术:
2.随着技术的发展,无人机的应用已越来越广,成为一种不可或缺的探索手段。
3.在一些特殊的场景,无人机容易出现意外而损坏,需要大量无人机协同作业,传统的无人机操控系统已不能很好的完成此时的无人机的控制。
4.因此,亟需研究一种能够在无人机防御系统下能够完成作战目的的一种无人机蜂群协同控制系统与控制方法。
技术实现要素:
5.为了解决上述问题,本发明人进行了锐意研究,通过设立领机,由领机指挥从机,达到协同控制,从而完成了本发明。
6.本发明的目的在于提供以下方面:
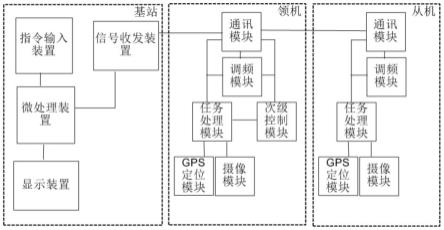
7.一方面,本发明提供了一种具有一种应用于多飞行器编队飞行的低成本控制系统,包括多个无人机和基站。
8.所述基站包括信号收发装置、指令输入装置、微处理装置和显示装置,
9.所述无人机具有gps定位模块、摄像模块、任务处理模块和通讯模块。
10.所述信号收发装置,用于和无人机进行通讯,
11.所述指令输入装置,用于输入控制指令,
12.所述微处理装置,用于处理控制指令,其能够接收指令输入装置输入的无人机控制指令,通过信号收发装置将指令传送给无人机,并通过信号收发装置获取无人机任务执行情况,将其传递给显示装置,
13.所述显示装置,用于显示无人机状态,能够接收微处理装置传递的无人机执行情况并展示,
14.所述控制指令包括系统启动、飞往任务区域、执行任务和返航,
15.所述通讯模块能够与基站进行通讯,
16.所述gps定位模块,能够使无人机获取其所在经纬度、高度等位置信息,
17.所述摄像模块,能够拍摄无人机所处位置的画面,
18.所述任务处理模块,能够通过通讯模块接收基站或其它无人机发出的控制指令,并控制其它模块,以按照控制指令内容控制无人机工作。
19.所述通讯模块,能够与其它无人机进行通讯,
20.在所述无人机上,还设置有次级控制模块,所述次级控制模块能够通过通讯模块对其它无人机发出控制指令,
21.优选地,所述次级控制模块还能够对其它无人机分配编号,以区分不同的无人机,
22.优选地,在无人机上,还设置有调频模块,使得无人机的通讯模块发出的信号频率可调,
23.在所述无人机上,设置有高能炸弹与触发式引信。
24.所述无人机分为领机和从机,所述领机具有一个,从机具有多个,领机直接与基站进行通讯,从机与领机进行通讯,从机之间不通讯,领机通过次级控制模块对从机进行控制。
25.另一方面,本发明还提供了一种应用于多飞行器编队飞行的低成本决策方法,包括以下步骤:
26.s1、系统启动;
27.s2、分配编号;
28.s3、飞往任务区域;
29.s4、执行任务。
30.在步骤s1中,通过基站指令输入装置选定一个无人机作为领机,其余无人机作为从机,基站通过信号收发装置与领机建立通讯,领机通过通讯模块与从机建立通讯,
31.在步骤s2中,基站赋予领机一个唯一编号,领机对与其建立通讯的从机进行编号,
32.在步骤s3中,通过基站指令输入装置向领机发出包含任务区域和执行任务的信息,领机接收到信息后,控制从机与其一同飞往任务区域,
33.在步骤s4中,当领机进入任务区域,通过通讯模块通知各从机开始执行步骤s3中分配的任务,并接收各从机反馈的信息,将信息汇总后传递到基站。
34.在步骤s1中,基站与领机之间的通讯采用低频段通讯,所述低频段为小于2200mhz,优选为800~2000mhz,领机与从机之间采用高频段通讯,所述高频段为大于2200mhz,优选为2300~5000mhz。
35.在步骤s3中,所述执行任务包括侦查、撞击目标等,当具有多个执行任务时,领机能够将不同的执行任务分配给不同的从机,
36.优选地,在飞往任务区域的过程中,领机对从机的位置进行排布,领机位于从机的中央,更优选地,从机按照编号顺序由近及远的的排布在领机周围,
37.在步骤s4中,在执行执行任务时,基站按照一定通讯频率,间歇式的与领机进行通讯,优选每0.05~0.1s通讯一次,
38.当基站在连续300~500次的通讯过程中或连续3~30s,未收到领机的向基站发出的通讯信号,则认为领机已出现意外损坏,
39.在领机出现意外损坏后,基站向其它无人机发送邀请握手信号,从机在接收到邀请握手信号后,向基站发出带有从机编号的握手请求,基站在接收到握手请求后,选择从机编号最小的从机发送的握手请求,与之建立通讯,将此从机晋升为领机。
40.根据本发明提供的一种无人机蜂群协同控制系统与控制方法,具有以下有益效果:
41.(1)能够对无人机蜂群进行协同控制;
42.(2)基站与无人机蜂群通讯的信号干扰小,通讯顺畅;
43.(3)该无人机蜂群的成本低、隐蔽性强;
44.(4)该无人机蜂群与基站的通讯不易被发现、不易被干扰。
附图说明
45.图1示出一种优选实施方式中无人机蜂群协同控制系统示意图。
具体实施方式
46.下面通过对本发明进行详细说明,本发明的特点和优点将随着这些示例性说明而变得更为清楚、明确。
47.在这里专用的词“示例性”意为“用作例子、实施例或说明性”。这里作为“示例性”所说明的任何实施例不必解释为优于或好于其它实施例。尽管在附图中示出了实施例的各种方面,但是除非特别指出,不必按比例绘制附图。
48.本发明一方面提供了一种应用于多飞行器编队飞行的低成本控制系统。
49.根据本发明,所述应用于多飞行器编队飞行的低成本控制系统包括多个无人机和基站。
50.所述基站能够与无人机进行通讯,并控制所述无人机,如图1所示,其包括信号收发装置、指令输入装置、微处理装置和显示装置。
51.其中,所述信号收发装置,用于和无人机进行通讯,通讯内容包括控制指令的传输,无人机监控画面的传输、无人机位置、无人机剩余数量等。
52.所述指令输入装置,用于输入控制指令,
53.所述微处理装置,用于处理控制指令,其能够接收指令输入装置输入的无人机控制指令,通过信号收发装置将指令传送给无人机,并通过信号收发装置获取无人机任务执行情况,将其传递给显示装置,
54.所述显示装置,用于显示无人机状态,能够接收微处理装置传递的无人机执行情况,并展示。
55.所述控制指令包括系统启动、飞往任务区域、执行任务、返航等。
56.进一步地,所述任务区域为某一个地理位置坐标,优选为经纬度坐标,
57.所述执行任务包括侦查、撞击既定目标或拍摄任务区域画面等,所述既定目标可以是某个具体地点位置坐标、某个建筑、某个交通工具或是某个具体的人等,
58.在一个优选的实施方式中,所述指令输入装置能够将目标照片、图片或位置信息输入,并通过微处理装置以及信号收发装置传递给无人机。
59.在本发明中,对所述无人机的种类不做特别限制,无人固定翼飞机、无人垂直起降飞机、无人飞艇、无人直升机、无人多旋翼飞行器或无人伞翼机均可,优选为微小型四旋翼无人机,其体积小、成本低,不易被察觉。
60.在所述无人机上,具有gps定位模块、摄像模块、任务处理模块和通讯模块。
61.所述gps定位模块,能够使无人机获取其所在经纬度、高度等位置信息。
62.所述摄像模块,能够拍摄无人机所处位置的画面。
63.所述任务处理模块,能够接收基站或其它无人机发出的控制指令,按照控制指令内容控制无人机工作,
64.所述控制无人机工作,包括启动无人机,飞往任务区域,执行任务,规划返航路径并按路径返航等。
65.进一步地,当任务内容为具体地点位置坐标时,任务处理模块能够规划无人机飞
行路径,并控制无人机按照规划路径飞行到目标地点;
66.当任务内容为既定目标的照片或图片时,任务处理模块能够将摄像模块拍摄的内容与既定任务的照片或图片进行比对,确定摄像模块拍摄的目标是否为既定目标,若是既定目标,则进行撞击或向基站传递找到目标的信息。
67.所述通讯模块能够与基站进行通讯。
68.进一步地,所述通讯模块,还可以与其它无人机进行通讯。
69.在所述无人机上,还设置有次级控制模块,所述次级控制模块能够通过通讯模块对其它无人机发出控制指令,以控制其它的无人机。
70.优选地,所述次级控制模块还能够对其它无人机分配编号,以区分不同的无人机。
71.在一个优选的实施方式中,在无人机上,还设置有调频模块,使得无人机的通讯模块发出的信号频率可调。
72.在一个更优选的实施方式中,所述任务处理模块能够获得与通讯目标之间的距离,并传递给调频模块,所述调频模块能够根据此距离,调整通讯模块的功率,使得通讯模块始终工作在能够保证通讯的最低功率下,避免通讯模块长期在高功率下工作,造成能源的浪费,缩短无人机的工作时间。
73.其中,所述通讯目标之间的距离为任务处理模块根据gps定位模块的信息计算得到,领机与基站的距离通过领机启动时无人机的gps定位模块记录的位置信息与领机实时位置信息确定,领机与从机之间的位置信息通过领机实时位置信息与从机实时位置信息确定。
74.根据本发明,在所述无人机上,还设置有炸弹与触发式引信,以在发现目标后撞击目标,
75.在一个优选的实施方式中,所述引信多点式压力传感器,使得无人机只有在摔落地面或撞击物体后能够引爆炸弹,而在被击落过程中不发生爆炸,
76.所述压力传感器安装在无人机各部位,当压力传感器超过3个点受到大于xn以上的压力,即引爆炸药,所述x可根据实际需要进行设置。
77.根据本发明,所述无人机可分为领机和从机,所述领机具有一个,从机具有多个,领机直接与基站进行通讯,从机与领机进行通讯,从机之间不通讯,领机通过次级控制模块对从机进行控制,从而形成无人机蜂群协同控制系统。
78.进一步地,当领机出现意外出现其它故障时,其与地面的通讯中断,则基站能够连接其它从机,将一个从机指定为领机,继续进行无人机蜂群的控制。
79.传统的无人机控制中,基站需要控制每个无人机进行作战,控制效率低、控制难度高,并且由于基站需要连接每个无人机,造成连接信号相互干扰,严重影响作战效果。
80.本发明中通过设置领机,利用领机控制从机,将无人机组成一个蜂群,通过基站对领机的控制,即可实现对无人机蜂群的协同控制,使得基站对无人机蜂群的控制更加简单有效,并且基站与无人机蜂群之间信号干扰小,通讯更加顺畅。
81.在一个优选的实施方式中,所述领机与基站的通讯采用低频通讯,领机与从机之间的通讯采用高频通讯,低频通讯具有通讯距离长、覆盖范围广、信号强度高的优点,适合远距离通讯,高频通讯具有通讯速度快、信息承载量大的优点,适合小范围多机之间大量协同通讯。
82.在一个更优选的实施方式中,所述
83.另一方面,本发明还提供了一种应用于多飞行器编队飞行的低成本决策方法,包括以下步骤:
84.s1、系统启动。
85.通过基站指令输入装置选定一个无人机作为领机,其余无人机作为从机,基站通过信号收发装置与领机建立通讯,领机通过通讯模块与从机建立通讯。
86.在一些特殊场景中,无人机极易被大量损毁,单独一架或几架无人机难以保证顺利的完成任务,需要多架无人机组成蜂群系统,同时进行任务,使得即使部分无人机出现意外损毁,无人机组成的蜂群仍然能够完成任务。
87.在一个优选的实施方式中,基站与领机之间的通讯采用低频段通讯,所述低频段为小于2200mhz,使得通讯距离更远,抗干扰性更强,优选为800~2000mhz,能够兼顾通讯距离以及通讯速率;
88.领机与从机之间采用高频段通讯,所述高频段为大于2200mhz,使得无人机之间快速交换大量信息,便于领机对从机进行控制,优选为2300~5000mhz,能够兼顾通讯速率以及能耗。
89.具体的,领机的通讯模块在接收到基站信号收发装置传递的信息后,将信息传递给任务处理模块,任务处理模块能够通过控制调频模块进而控制通讯模块与基站之间的通讯频段和功率等,
90.进一步地,领机的任务处理模块还能够将基站传递的信息传递给次级控制模块,所述次级控制模块能够通过调频模块控制通讯模块,进而与从机之间建立通讯。
91.s2、分配编号。
92.基站赋予领机一个唯一编号,以便于从机识别领机,领机对与其建立通讯的从机进行编号,以便于领机识别和控制不同的从机,
93.在一个优选的实施方式中,基站对领机编号0,领机对不同的从机依次编号1,2,3,
……
,以方便的识别出所有无人机。
94.s3、飞往任务区域。
95.通过基站指令输入装置向领机发出包含任务区域和待执行任务的信息,领机接收到信息后,由领机的任务处理模块规划路径并控制领机飞行,领机的次级处理模块规划各从机的任务,并通过通讯模块传递给各从机,各从机接收到任务后,在从机任务处理模块的控制下与领机一同前往任务区域。
96.所述任务包括侦查、撞击目标等,当具有多个任务时,领机能够通过次级处理模块将不同的任务分配给不同的从机,例如有两个任务时(任务一和任务二),领机能够分配1~10号从机执行任务一,11~20号从机执行任务二,以提高执行效率。
97.优选地,在飞往任务区域的过程中,领机对从机的位置进行排布,领机位于从机的中央,既使得领机与从机的通讯距离最短,又通过从机实现对领机的保护。
98.进一步地,从机按照编号顺序由近及远的的排布在领机周围。
99.在飞往任务区域的过程中,领机能够通过从gps定位模块获得的位置信息,以及任务区域信息,规划飞行路线,并对飞行路线时时修正,以确保能够到达任务区域。
100.s4、执行任务。
101.当领机进入任务区域,通过通讯模块通知各从机开始执行步骤s3中分配的任务,并接收各从机反馈的信息,将信息汇总后传递到基站。
102.具体地,若任务为查探某个具体地点,则从机到达任务地点后,将已到达的信息通过通讯模块反馈给领机,并将拍摄的画面传递给领机,领机将信息汇总后传送到基站,等待下步任务;
103.若任务为查找目标图片或照片,则从机能够将摄像模块拍摄的内容与目标图片或照片相比对以确定拍摄到的是否为目标,若为目标,则将拍摄到的目标画面反馈给领机,由领机将此信息传递到基站。
104.在执行任务中,若无人机意外损坏掉落或撞击到目标时,其上的引信将引爆无人机携带的炸药,进行自爆并具有一定的破坏力。
105.在一个优选的实施方式中,在执行任务时,基站按照一定通讯频率,间歇式的与领机进行通讯,优选每0.05~0.1s通讯一次,以减少领机与基站的通讯被侦查到的概率,从而降低通讯被压制式干扰拦截的概率。
106.当基站在连续300~500次的通讯过程中或连续3~30s,未收到领机向基站发出的通讯信号,则认为领机已出现意外损坏,
107.在领机出现意外损坏后,基站向其它无人机发送邀请握手信号,从机在接收到邀请握手信号后,向基站发出带有从机编号的握手请求,基站在接收到握手请求后,选择从机编号最小的从机发送的握手请求,与之建立通讯,将此从机晋升为领机,并将其编号变更成0,使得其它从机能够识别出其为新的领机,并与之建立通讯。
108.在一个优选的实施方式中,在领机出现意外损坏后,基站向1~10号从机发送邀请握手信号,1~10号从机在接收到邀请握手信号后,向基站发出带有从机编号的握手请求,基站在接收到握手请求后,选择从机编号最小的从机发送的握手请求,与之建立通讯,将此从机晋升为领机,并将其编号变更成0,使得其它从机能够识别出其为新的领机,并与之建立通讯。
109.若基站在30s内未收到握手请求,基站向11~20号从机发送邀请握手信号,并以此类推,直至收到握手请求。
110.分批次发送邀请握手信号,在达到快速确定新领机的目的前提下,使得基站与无人机蜂群之间的信号干扰少,连接速度快。
111.按低编号到高编号的顺序向从机发送邀请握手信号,使得新的领机为最小编号的领机,其所在位置靠近原领机,位于无人机群靠近中央位置,使得新领机与从机的通讯距离最短。
112.优选地,新的领机能够将与其建立通讯的从机按照由近及远的顺序重新编号,以便于领机再次出现意外损坏后,新领机的晋升。
113.在本发明的描述中,需要说明的是,术语“上”、“下”、“内”、“外”、“前”、“后”等指示的方位或位置关系为基于本发明工作状态下的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”、“第四”仅用于描述目的,而不能理解为指示或暗示相对重要性。
114.以上结合具体实施方式和范例性实例对本发明进行了详细说明,不过这些说明并
不能理解为对本发明的限制。本领域技术人员理解,在不偏离本发明精神和范围的情况下,可以对本发明技术方案及其实施方式进行多种等价替换、修饰或改进,这些均落入本发明的范围内。本发明的保护范围以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。