1.本公开涉及一种遥控车辆操纵系统,所述遥控车辆操纵系统包括个人通信装置,所述个人通信装置被配置为在遥控车辆操纵操作期间消除车辆运动干扰。
背景技术:
2.操作拖有挂车的车辆对于许多驾驶员来说是非常具有挑战性的。这对于不能熟练对附接有挂车的车辆进行倒车的驾驶员来说尤其如此。此类驾驶员可包括不常在有挂车的情况下驾驶的那些驾驶员(例如,租用挂车的驾驶员)。例如,当手动地使挂车倒退时,方向盘输入的方向与所得挂车方向可能是违反直觉的。
3.此外,在遥控的情形下,随着车辆和挂车周围的不同位置处的视角改变,可能难以保持应用来实现特定路径形状的方向盘角度。当个人站在车辆后面时,通过使用用于使挂车单向(例如,向后和向左)移动的遥控装置执行的某些类型的遥控操作对于个人来说可能是直观的,但是当个人站在车辆的前方时是违反直觉的。此外,在某些情况下,其他因素可能会影响遥控操作,诸如当个人站在车辆(例如,皮卡车)的货厢上或挂车上并使用手持式装置来操纵车辆和挂车时。
4.因此,希望解决与遥控操作(诸如上述那些)相关的各种问题。
技术实现要素:
5.本文公开的系统和方法总体上涉及一种遥控车辆操纵系统,所述遥控车辆操纵系统包括个人通信装置,所述个人通信装置被配置为在遥控车辆操纵操作期间消除车辆运动干扰。在示例性场景中,个人可以站在附接有挂车的车辆的平板部分上(或站在挂车上)并对个人通信装置执行各种动作。此类动作可以涉及向车辆的车辆控制器传输命令以使车辆以期望的角度和期望的方向向后移动。由个人对个人通信装置执行的动作可以包括例如以某个角度倾斜个人通信装置,以便命令车辆控制器增加车辆的速度。在这样做的同时,各种因素(诸如例如路面上的物体)可能导致车辆倾斜,从而增加个人通信装置的倾斜角度并导致车辆危险地加速。根据本公开,个人通信装置被配置为消除由此类因素引起的干扰。
附图说明
6.参考附图阐述具体实施方式。使用相同的附图标记可以指示类似或相同的项。各种实施例可以利用除了附图中示出的那些之外的元件和/或部件,并且一些元件和/或部件可能不存在于各种实施例中。附图中的元件和/或部件不一定按比例绘制。在整个本公开中,根据上下文,单数和复数术语可以可互换地使用。
7.图1示出了根据本公开的实施例的遥控车辆操纵操作的第一示例性场景。
8.图2示出了根据本公开的用于操纵车辆的个人通信装置的一些操作特征。
9.图3示出了根据本公开的实施例的个人通信装置的一些部件。
10.图4示出了根据本公开的实施例的遥控车辆操纵操作的第二示例性场景。
11.图5示出了在图4所示的遥控车辆操纵操作期间可能遇到的示例性情况。
12.图6示出了根据本公开的实施例的第三示例性遥控车辆操纵系统操作。
13.图7示出了在图6所示的遥控车辆操纵操作期间可能遇到的示例性情况。
14.图8示出了根据本公开的用于在遥控车辆操纵操作期间消除车辆运动干扰的示例性方法的流程图。
具体实施方式
15.下文将参考附图更全面地描述本公开,其中示出了本公开的示例实施例。然而,本公开可以以许多不同形式来体现,并且不应被解释为受限于本文阐述的示例实施例。相关领域技术人员将理解,在不脱离本公开的精神和范围的情况下可对各种实施例作出形式和细节上的各种变化。因此,本公开的广度和范围不应受到上述示例实施例中的任何一个的限制,而是应仅根据所附权利要求和其等效物限定。以下描述是为了说明目的而呈现,并且不意图是详尽性的或受限于所公开的精确形式。应理解,替代实现方式可以按任何所期望的组合使用,以形成本公开的附加混合实现方式。例如,相对于特定装置或部件描述的任何功能性可以通过另一个装置或部件来执行。例如,在某些实施例中,本文关于个人通信装置描述的一些或全部功能可以由车辆控制器和/或车辆的另一个部件执行。此外,尽管已经描述了特定的装置特性,但是本公开的实施例可以涉及许多其他装置特性。此外,尽管已用特定于结构特征和/或方法动作的语言描述了实施例,但是应理解,本公开不一定受限于所描述的具体特征或动作。相反,将具体特征和动作公开为实现实施例的说明性形式。
16.本文使用的某些词语和短语仅是为了方便,并且这些词语和术语应被解释为是指本领域普通技术人员通常以各种形式和等价方式理解的各种对象和动作。例如,在本公开中使用的词语“车辆”可以涉及各种类型的车辆中的任一种,诸如,例如轿车、货车、运动型多功能车、卡车、电动车辆、汽油车辆、混合动力车辆、以及自主车辆。如本文所使用的短语“个人通信装置”是指可以由个人携带的各种类型的装置中的任一种。个人通信装置(其也可以被称为移动装置)的几个示例可以包括蜂窝电话、智能电话、平板计算机、平板电话(电话加平板计算机)和便携式计算机。此类个人通信装置可以用于执行各种操作,包括从车辆内部或外部进行的遥控车辆操纵操作。各种个人通信装置可以使用各种通信介质和通信格式与车辆的部件(诸如车辆控制器)通信。例如,智能电话可以经由蜂窝通信链路和蜂窝通信基础设施(蜂窝塔、中继器等)与车辆控制器通信。作为另一个示例,平板电话或膝上型计算机可以经由通信链路与车辆控制器通信。
17.如本文所使用的短语“手势命令”是指在个人通信装置上执行的各种动作中的任一种。一些示例性手势命令可以包括在个人通信装置的触摸屏上执行触摸相关动作、在各个方向上移动个人通信装置、将个人通信装置定向在各个角度、以及以各种速度在空间中移动个人通信装置。
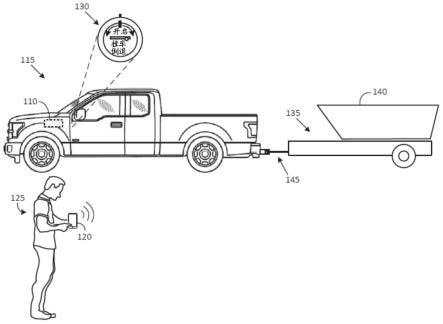
18.图1示出了根据本公开的实施例的遥控车辆操纵系统操作的第一示例性场景。在该示例性场景中,个人125使用个人通信装置120来操纵车辆115以使挂车135向后移动。挂车135支撑船140。个人125可能例如正在移动挂车135以便将船140放入湖中,或者例如将挂车135停放在停车位中。
19.必须理解,尽管车辆115被示出为卡车,但是根据本公开,所述车辆可以采取任何
其他乘用车或商用车的形式,诸如,例如,轿车、运动型多功能车、跨界车、货车、小型货车、出租车或公共汽车。类似地,在其他场景中,根据本公开,挂车135可以采用露营车、货物集装箱、马挂车、平板车等的形式。
20.车辆115可以在各种应用中具有各种类型的汽车驱动系统。示例驱动系统可以包括各种类型的内燃发动机(ice)动力传动系统,所述各种类型的内燃发动机动力传动系统具有汽油、柴油或天然气动力的燃烧发动机与常规的驱动部件,诸如变速器、驱动轴、差速器等。
21.在一些情况下,车辆115可以被配置为电动车辆(ev)。更具体地,车辆115可以包括电池ev(bev)驱动系统。车辆115可以被配置为具有独立车载动力装置的混合动力ev(hev)或包括hev动力传动系统的插电式hev(phev),所述hev动力传动系统可连接到外部动力源(包括具有燃烧发动机动力装置和一个或多个ev驱动系统的并联或串联混合动力动力传动系统)。hev可以包括用于蓄电的电池和/或超级电容器组、飞轮蓄电系统或者其他发电和蓄电基础设施。
22.车辆115还可以被配置为使用燃料电池(例如,氢燃料电池车辆(hfcv)动力传动系统等)和/或这些驱动系统和部件的任何组合将液体或固体燃料转换为可用动力的燃料电池车辆(fcv)。此外,在一些情况下,车辆115可以是手动驾驶的车辆,和/或被配置为以完全自主或部分自主模式操作。
23.挂车135经由挂接件145联接到车辆115,使得车辆115能够将挂车135从一个位置拉动或推动到另一个位置。挂接件145被配置为当车辆115向前移动时允许挂车135遵循车辆115的路径。当车辆115倒车移动时,挂车135的路径取决于车辆115在挂接件145处施加的力的方向。如果车辆115和挂车135的纵向轴线通过挂接件145对准,则倒车路径是笔直的。如果车辆115的纵向轴线和挂车135的纵向轴线成角度,则倒车路径具有弯曲形状。
24.车辆115可以包括各种部件,诸如车辆控制器110,所述车辆控制器可以安装在车辆115的发动机舱中(如图1中示意性所示)或车辆115中的其他地方。车辆控制器110被布置成与车辆115的部件(诸如燃料喷射系统和速度控制系统)协作以控制车辆115的各种操作。一些示例功能可以包括控制发动机操作(燃料喷射、速度控制、排放控制、制动等)、管理气候控制(空调、加热等)、激活安全气囊和发出警告(检查发动机灯、灯泡故障、轮胎压力低、车辆处于盲区等)。在一些情况下,车辆控制器110可以包括多于一个计算机,诸如,例如控制发动机操作的第一计算机和执行动作(诸如管理设置在车辆115中的防盗系统和/或信息娱乐系统)的第二计算机。
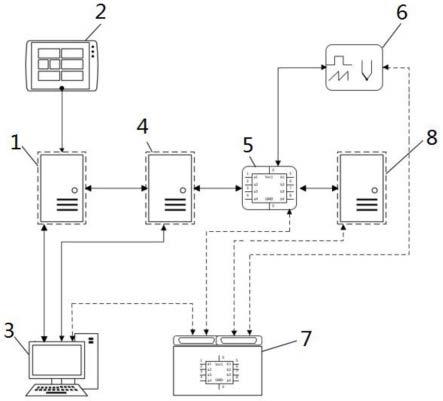
25.在根据本公开的一个示例性实现方式中,遥控车辆操纵系统的一些或所有部分可以结合到车辆控制器110中。在根据本公开的另一个示例性实现方式中,遥控车辆操纵系统可以以通信地耦合到其他装置(诸如车辆控制器110、个人通信装置120、服务器计算机(经由无线网络),以及安装在车辆115上的一个或多个传感器)的方式安装到车辆115中。在根据本公开的又一个示例性实现方式中,遥控车辆操纵系统可以设置在个人通信装置120中,所述个人通信装置被配置为与诸如车辆控制器110、服务器计算机以及车辆115中的一个或多个传感器之类的装置通信。
26.车辆115和挂车135的移动可以由个人125以各种方式控制。在手动操作模式中,个人125可以通过操作车辆115的方向盘和其他部件(诸如加速器和制动器)来手动地控制车
辆115的移动。
27.在另一种操作模式中,个人125可以通过操作设置在车辆115的控制盘上的挂车倒退旋钮130来控制车辆115的移动。在这种情况下,个人125按下挂车倒退旋钮130上的“开启”按钮,将车辆115的换挡器移动到倒车挡,并且将手从方向盘上移开。然后,个人125沿顺时针或逆时针方向旋转挂车倒退旋钮130,以便引导车辆控制器110以期望的角度和期望的方向向后移动车辆。
28.在根据本公开的又一种操作模式中,个人125使用个人通信装置120来发出遥控命令,所述遥控命令引导车辆控制器110以期望的角度和期望的方向向后移动车辆。在一个示例性应用中,个人通信装置120包含由个人125通过使用人机界面(hmi)(诸如例如个人通信装置120的触摸屏)启动的软件应用程序。然后,个人125通过使用手指在触摸屏上启动手势命令和/或通过以各种方式移动个人通信装置120来发出遥控命令。下面使用其他附图描述与手势命令有关的一些方面。
29.在一些情况下,个人125可以在坐在或站在车辆115内时使用个人通信装置120来发出遥控命令。在一些其他情况下,个人125可以在站在车辆115外部时使用个人通信装置120来发出遥控命令,如图1所示。个人125可以出于各种原因而选择站在车辆115外部,诸如例如在倒车操作期间具有对挂车135的不受限制的视野。
30.可以通过在车辆115和/或挂车135中提供各种装置中的任一种来根据本公开确定个人125的位置(车辆115内部或外部)。例如,可以在车辆115中提供一个或多个相机以用于捕获被传送到车辆控制器110的图像。可以是车辆控制器110的一部分的遥控车辆操纵系统可以分析图像以确定个人125的位置。
31.作为另一个示例,可以通过识别由个人125携带的个人通信装置120的位置来以间接方式确定个人的位置。在该场景中,车辆115可以包括一个或多个无线通信节点,所述一个或多个无线通信节点由遥控车辆操纵系统使用来确定个人通信装置120相对于车辆115的位置。可以通过采用各种无线通信技术(诸如超宽带(uwb)、wi-fi、或近场通信(nfc))中的任一种以及装置定位程序(诸如,例如,接收信号强度指示(rssi)程序、飞行时间(tof)三边测量程序、到达角(aoa)程序、出发角(aod)程序和/或射频识别(rfid)程序)来进行确定。
32.在一种示例性方法中,可以通过将车辆115的运动特性与个人通信装置120的运动特性进行比较来实施通过定位个人通信装置120来间接地确定个人125的位置。车辆115的运动特性可以从附接到车辆115的一个或多个传感器获得,诸如从加速度计或压电传感器获得。个人通信装置120的运动特性可以从设置在个人通信装置120中的一个或多个传感器(诸如例如加速度计)获得。将车辆115的运动特性与个人通信装置120的运动特性进行比较可以披露指示个人125位于车辆115内部的相似性或反之亦然(指示个人125位于车辆115外部的差异性)。
33.图2示出了根据本公开的用于操纵车辆115的个人通信装置120的一些操作特征。个人通信装置120可以包括处理器和计算机可读存储器。存储器可以是存储计算机可执行指令的非暂时性计算机可读存储器。计算机可执行指令可以以软件应用程序的形式提供,所述软件应用程序由处理器执行以执行与根据本公开的遥控车辆操纵相关联的至少一些操作。
34.当执行这些操作时,个人通信装置120可以在个人通信装置120的显示屏205上显示各种图形图像。显示屏205可以是作为人机界面(hmi)操作的触摸屏。在示例性场景中,车辆115和挂车135的图形可以显示在显示屏205上并且在遥控车辆操纵操作期间实时更新。实时图形可以表示车辆115和挂车135在前进方向上和/或在后退方向上从第一位置到第二位置的受控移动。
35.可以在显示屏205上提供诸如图标、按钮和条等附加图形,以允许个人125将手势命令输入到个人通信装置120中以操纵车辆115。手势命令可以用于在各种方向上、以各种角度和以各种速度移动车辆115和挂车135。
36.在一个示例性程序中,个人125将两个拇指放在显示屏205(在这种情况下是触摸屏)上,并且使个人通信装置120围绕垂直于触摸屏的轴线旋转以便执行手势命令,所述手势命令指示车辆控制器110以使得获得挂车135的期望的曲线路径和/或期望的角度取向的方式移动车辆115。
37.在另一个示例性程序中,个人125将两个拇指放在个人通信装置120的触摸屏上并且使个人通信装置120围绕相对于触摸屏是水平的轴线倾斜,以便执行手势命令,所述手势命令指示车辆控制器110在向后移动时改变车辆115的移动速度。在一些情况下,车辆115的移动速度可以被限于预设极限。可以基于诸如安全性和机动性等因素来确定预设极限。
38.在又一示例性程序中,个人125将个人通信装置120相对于轴线旋转到期望角度以通知车辆控制器110采取动作。
39.个人通信装置120可以包括用于检测由个人125对个人通信装置120执行的手势命令的各种部件,诸如通过相对于各个轴线中的任一种在各个方向中的任一个上移动个人通信装置120。相对于x轴、y轴和z轴的旋转移动在图2中示出。
40.图3示出了根据本公开的实施例的个人通信装置120的一些示例性部件。更特定地,在该示例性图示中,个人通信装置120包括显示屏205和呈加速度计305形式的传感器。加速度计305提供传感器信号以供遥控车辆操纵软件应用程序使用。传感器信号可以出于各种原因由遥控车辆操纵软件应用程序处理,诸如例如解译手势命令、确定个人通信装置120的位置、和/或提供警告和通知。
41.例如,解译手势命令(诸如旋转和倾斜)可能涉及多个计算,所述计算包括将重力加速度(9.8米/秒2)施加到传感器信号振幅以及以一个或多个加速度矢量的形式表示计算结果。加速度矢量可以指示在朝向地球表面的方向上的重力加速度的幅值。因此,某些手势命令特性可以以沿着个人通信装置120的x轴、y轴和/或z轴的矢量形式表示。其他手势命令特性可以以各种其他方式表示,诸如例如通过相对于轴线的角度偏差表示。因此,相对于x轴的30度的角度偏差可以指示第一振幅,并且相对于x轴的45度的角度偏差可以指示大于第一振幅的第二振幅。
42.图4示出了根据本公开的实施例的遥控车辆操纵系统操作的第二示例性场景。在该示例性场景中,个人125站在车辆115的平板部分上,同时操作个人通信装置120以在船用坡道上向后操纵挂车135进入湖中。个人125可能出于各种原因而选择站在车辆115的平板部分上,所述各种原因诸如例如为了获得挂车135的无障碍视野和/或确保挂车135在进入湖之前不会侧向滑离船用坡道。
43.个人125可以通过使个人通信装置120相对于平行于车辆115正在其上移动的地面
延伸的水平矢量415以角度“θ1”倾斜来控制车辆115的速度。角度偏差(“θ1”)可以由在水平矢量415上方成角度地延伸的矢量420指示,并且表示个人125使车辆115以第一速度(例如,2mph)移动的命令。角度偏差的增加可以表示个人125对车辆115以更高的速度(例如,5mph)移动的命令。
44.在该示例性场景中,根据本公开的操纵车辆115的方法可以包括操作遥控车辆操纵系统以首先确定个人125的位置。例如,可以通过分析从相机405接收的图像来执行该程序。相机405可以发送示出个人125站在车辆115的平板部分上的图像(例如,数字图像)和/或图像的视频流。在确定个人125站在车辆115的平板部分上之后,遥控车辆操纵系统可以执行根据本公开的各种其他操作。下面使用其他附图描述这些操作中的一些操作。
45.图5示出了在图4所示的遥控车辆操纵车辆操作期间可能遇到的示例性情况。在向后移动时,车辆115可能遇到位于行驶表面上的物体505。物体505使车辆115的后部抬起,从而使个人125如图所示向后倾斜。在向后倾斜时,个人通信装置120向上倾斜,从而将图4所示的角度“θ1”改变为相对于水平矢量415的更大角度“θ3”。由矢量510限定的更大角度“θ3”包含角度“θ1”和附加角度“θ2”。如果不进行校正,则角度的变化可能导致车辆115的速度突然改变。对期望的遥控操纵操作的这种改变(在该示例中,角度增加)可以被称为车辆运动干扰,并且期望根据本公开消除这种车辆运动干扰。在图5所示的示例性情况下,车辆运动干扰的消除可以通过消除角度“θ2”来执行,这可以例如通过从角度偏差“θ3”中减去角度偏差“θ2”以便获得所期望的角度“θ1”来执行。
46.图6示出了根据本公开的实施例的遥控车辆操纵系统操作的第三示例性场景。在该示例性场景中,个人125站在挂车135上,同时操作个人通信装置120以操纵车辆115在船用坡道(未示出)上向后推动挂车135进入湖中(未示出)。个人125可能出于各种原因而选择站在挂车上,所述各种原因诸如例如确保挂车135在进入湖之前不会侧向滑离船用坡道和/或因为车辆115可能缺少用于站立的合适位置(诸如平板部分)。
47.个人125通过使个人通信装置120相对于平行于车辆115正在其上移动的地面延伸的水平矢量415以角度“θ4”倾斜来控制车辆115的速度。角度偏差(“θ4”)可以由在水平矢量415上方成角度地延伸的矢量610指示,并且表示个人125对车辆115以第一速度(例如,5mph)移动的命令。角度偏差的减小可以表示个人125对车辆115以更低的速度(例如,2mph)移动的命令。
48.在该示例中,遥控车辆操纵系统可以通过分析从联接到遥控车辆操纵系统的相机405和/或相机605接收的图像来确定个人125的位置。例如,相机605可以发送示出个人125站在挂车135上的图像(例如,数字图像)和/或图像的视频流。遥控车辆操纵系统可以使用该信息来执行根据本公开的各种操作。
49.图7示出了在图6所示的遥控车辆操纵车辆操作期间可能遇到的示例性情况。如上述示例中,车辆115在倒退移动时遇到行驶表面上的物体505。物体505不仅使车辆115的后部抬起,而且还抬起个人125所站立的挂车135的一部分。挂车135的抬起导致个人125向前倾斜。
50.在向前倾斜时,个人通信装置120向下倾斜,从而将图6所示的角度“θ4”改变为相对于水平矢量415的更小角度“θ6”。由矢量710限定的更小角度“θ6”具有从角度“θ4”减去的角度“θ5”。如果不进行校正,则角度的变化可能导致车辆115的速度突然改变。在图7所示的
该示例性情况下,车辆运动干扰的消除可以通过消除角度“θ5”来执行,这可以例如通过将角度偏差“θ5”与角度偏差“θ6”相加以便获得所期望的角度“θ4”来执行。
51.上述示例性情况涉及通过使用加法和减法来消除车辆运动干扰。在其他示例性情况下,可以通过使用各种其他方法来消除车辆运动干扰,包括使用各种数学运算符、方程和算法。数学运算符、方程和算法可以包括例如线性运算符、非线性运算符、线性方程、非线性方程、曲线拟合技术、递归运算、误差最小化运算、数字堆砌运算、模板、历史数据、习得数据、以及个人125的个人偏好。
52.图8示出了根据本公开的用于在遥控车辆操纵操作期间消除车辆运动干扰的示例性方法的流程图800。流程图800示出了可以以硬件、软件或其组合实现的一系列操作。在软件的背景下,所述操作表示存储在一个或多个非暂时性计算机可读介质(诸如包含在个人通信装置120中或车辆控制器110中的存储器)上的计算机可执行指令,所述计算机可执行指令在由一个或多个处理器(诸如分别包含在个人通信装置120中或车辆控制器110中的处理器)执行时执行所列举的操作。一般而言,计算机可执行指令包括执行特定功能或实现特定抽象数据类型的例程、程序、对象、部件、数据结构等。描述操作的顺序不意图被解释为限制,并且任何数量的所描述的操作可以以不同的顺序执行、省略、以任何顺序组合和/或并行执行。流程图800中描述的一些或全部操作可以由个人通信装置和/或车辆控制器执行。以下描述可以参考其他附图中所示的某些部件和对象(例如,个人通信装置120和车辆控制器110),但是应理解,这样做是出于解释本公开的某些方面的目的,并且所述描述同样适用于各种其他实施例中的各种其他部件。
53.在框805处,可以检测由个人125执行的发起遥控车辆操纵操作的动作。示例性动作可以包括个人125启动个人通信装置120上的遥控车辆操纵软件应用程序。另一个示例性动作可以涉及个人125在将车辆115置于倒车挡之后将两个拇指放在个人通信装置120的触摸屏上。当车辆115被置于倒车挡时并且预期到来自个人125的遥控命令时,车辆控制器110可以开始使车辆115向后移动。
54.在框810处,确定个人125是否已经执行了用于执行遥控车辆操纵操作的个人通信装置120的运动。例如,个人125可以根据手势命令来移动个人通信装置120,诸如例如向下倾斜个人通信装置120以增加车辆115的移动速度、向上倾斜个人通信装置120以降低车辆115的移动速度、和/或围绕个人通信装置120的水平轴线旋转个人通信装置120。
55.如果个人125尚未做出任何手势命令,则在框815处,车辆控制器110可以使车辆115停止并等待个人125再次发起遥控车辆操纵操作(在框805处)。
56.如果个人125已经对个人通信装置120执行了手势命令,则在框820处,在一个示例性实现方式中,个人通信装置120可以将关于手势命令的信息存储在个人通信装置120的存储器中以在生成根据本公开的车辆控制信号之前执行一些附加操作。在另一个示例性实现方式中,个人通信装置120可以基于手势命令生成车辆控制信号并将车辆控制信号存储在存储器中并执行下面描述的附加操作。
57.在框825处,个人通信装置120可以接收提供关于车辆115和/或挂车135的运动信息的传感器信号。可以由附接到车辆115和/或挂车135的一个或多个传感器提供的传感器信号可以包含指示各种状况的信息,诸如例如车辆115的底盘的倾斜、车辆115中的零件的倾斜、车辆115中的振动和/或车辆115的速度变化。此类状况可以在诸如上面参考图5和/或
图7所述的那些场景的各种场景下发生。在一些情况下,车辆115和/或挂车135的倾斜可以模拟由个人125施加到个人通信装置120的手势命令。
58.在框830处,确定个人125是存在于车辆115中、挂车135中还是车辆115外部。如果个人125存在于车辆115中或挂车135中,则可以分别关于车辆115或挂车135的运动活动对由个人125对个人通信装置120执行的手势命令的影响做出进一步确定。
59.在框835处,消除由运动活动引起的车辆运动干扰。该动作可以以各种方式执行,诸如例如通过将传感器信号添加到在框820处生成的车辆控制信号、从在框820处生成的车辆控制信号中减去传感器信号、和/或以各种方式抵消传感器信号。在一些应用中,如上所述,可以通过从第二角度偏差中减去第一角度偏差,或者通过将第一角度偏差与第二角度偏差相加来消除车辆运动干扰。第一角度偏差基于传感器信号,并且第二角度偏差基于个人通信装置。
60.在框840处,在一个示例性实现方式中,个人通信装置120在消除车辆运动干扰之后向车辆控制器110传输车辆控制信号。在另一个示例性实现方式中,个人通信装置120向车辆控制器110传输车辆控制信号和传感器信号而不从车辆控制信号中消除车辆运动干扰。车辆控制器110在控制车辆115的移动之前消除车辆运动干扰。
61.在框845处,车辆115响应由车辆控制器110提供的车辆控制信号并且根据由个人125对个人通信装置120发起的预期手势命令来移动。
62.返回参考框830,如果确定个人125在车辆115外部,则不需要消除车辆运动干扰。因此,在框840处,个人通信装置120与车辆控制器110通信以根据由个人125对个人通信装置120发起的预期手势命令使车辆115移动。
63.在以上公开中,已经参考了形成以上公开的一部分的附图,附图示出了其中可以实践本公开的具体实现方式。应理解,在不脱离本公开的范围的情况下,可以利用其他实施方式,并且可以作出结构上的改变。说明书中对“一个实施例”、“实施例”、“示例性实施例”、“示例性实施例”等的引用指示所描述的实施例可以包括特定特征、结构或特性,但是每一个实施例可以不必包括所述特定特征、结构或特性。另外,此类短语不一定是指同一实施例。另外,当结合实施例描述特定特征、结构或特性时,无论是否明确地描述,本领域技术人员都将认识到结合其他实施例的此类特征、结构或特性。
64.本文所公开的系统、设备、装置和方法的实现方式可以包括或利用包括硬件(诸如,例如本文所讨论的一个或多个处理器和系统存储器)的一个或多个装置。本文公开的装置、系统和方法的实现方式可以通过计算机网络进行通信。“网络”被定义为能够在计算机系统和/或模块和/或其他电子装置之间传输电子数据的一个或多个数据链路。当通过网络或另一种通信连接(硬连线、无线或者硬连线或无线的任何组合)向计算机传送或提供信息时,所述计算机适当地将连接视为传输介质。传输介质可以包括网络和/或数据链路,所述网络和/或数据链路可用于以计算机可执行指令或数据结构的形式承载期望的程序代码手段,并且可由通用或专用计算机访问。以上项的组合也应包括在非暂时性计算机可读介质的范围内。
65.计算机可执行指令包括例如在处理器处执行时致使处理器执行特定功能或功能组的指令和数据。计算机可执行指令可以是例如二进制代码、中间格式指令(诸如汇编语言)或甚至源代码。尽管已经用特定于结构特征和/或方法动作的语言描述了本主题,但是
应理解,在所附权利要求中限定的主题不必限于上面描述的所述特征或动作。而是,所描述的特征和动作被公开作为实施权利要求的示例形式。
66.存储器装置(诸如设置在个人通信装置120中的存储器)可以包括任何一个存储器元件或易失性存储器元件(例如,随机存取存储器(ram,诸如dram、sram、sdram等))和非易失性存储器元件(例如,rom、硬盘驱动器、磁带、cdrom等)的组合。此外,存储器装置可以并入有电子、磁性、光学和/或其他类型的存储介质。在本文件的背景下,“非暂时性计算机可读介质”可以是例如但不限于电子、磁性、光学、电磁、红外或半导体系统、设备或装置。所述计算机可读介质的更具体的示例(非详尽列表)将包括如下:便携式计算机软磁盘(磁性)、随机存取存储器(ram)(电子)、只读存储器(rom)(电子)、可擦除可编程只读存储器(eprom、eeprom或快闪存储器)(电子)以及便携式压缩盘只读存储器(cd rom)(光学)。应注意,所述计算机可读介质甚至可为上面打印有程序的纸张或另一合适的介质,因为所述程序可以例如经由对纸张或其他介质的光学扫描被电子捕获,然后在必要时以合适的方式编译、解释或以其他方式处理,并且随后存储在计算机存储器中。
67.本领域技术人员将了解,本公开可以在具有许多类型的计算机系统配置的网络计算环境中实践,所述计算机系统配置包括内置式车辆计算机、个人计算机、台式计算机、膝上型计算机、消息处理器、手持式装置、多处理器系统、基于微处理器的或可编程的消费电子产品、网络pc、小型计算机、大型计算机、移动电话、pda、平板电脑、寻呼机、路由器、交换机、各种存储装置等。本公开还可以在分布式系统环境中实践,其中通过网络链接(通过硬连线数据链路、无线数据链路或通过硬连线数据链路与无线数据链路的任何组合)的本地和远程计算机系统两者都执行任务。在分布式系统环境中,程序模块可以位于本地和远程存储器存储装置两者中。
68.另外,在适当的情况下,本文描述的功能可以在以下一者或多者中执行:硬件、软件、固件、数字部件或模拟部件。例如,一个或多个专用集成电路(asic)可以被编程为实施本文所描述的系统和程序中的一者或多者。贯穿说明书以及权利要求使用的某些术语是指特定系统部件。如本领域技术人员将理解,部件可以通过不同的名称来指代。本文件不意图区分名称不同但功能相同的部件。
69.本公开的至少一些实施例已经涉及计算机程序产品,其包括存储在任何计算机可用介质上的这种逻辑(例如,以软件的形式)。这种软件当在一个或多个数据处理装置中被执行时致使装置如本文所描述那样进行操作。
70.尽管上文已描述了本公开的各种实施例,但应理解,仅通过示例而非限制的方式呈现本公开的各种实施例。相关领域的技术人员将明白,在不脱离本公开的精神和范围的情况下可以作出形式和细节上的各种变化。因此,本公开的广度和范围不应受到上述示例实施例中的任何一个的限制,而是应仅根据所附权利要求和其等效物限定。已经出于说明和描述目的而呈现了前述描述。前述描述不意图是详尽的或将本公开限制于所公开的精确形式。根据以上教导,许多修改和变化是可能的。另外,应注意,任何或所有前述替代实现方式可以期望的任何组合使用以形成本公开的附加混合实现方式。例如,相对于特定装置或部件描述的任何功能可以通过另一个装置或部件来执行。另外,尽管已经描述了具体装置特性,但本公开的实施例可能涉及许多其他装置特性。此外,尽管已用特定于结构特征和/或方法动作的语言描述了实施例,但是应理解,本公开不一定受限于所描述的具体特征或
动作。相反,将具体特征和动作公开为实现实施例的说明性形式。除非另有特别说明或在使用时在上下文内以其他方式理解,否则诸如尤其是“能够”、“可能”、“可以”或“可”的条件语言通常意图表达某些实施例可能包括某些特征、元件和/或步骤,而其他实施例可不包括某些特征、元件和/或步骤。因此,此类条件语言一般并不意图暗示一个或多个实施例无论如何都需要各特征、元件和/或步骤。
71.根据一个实施例,车辆和/或挂车的运动包括所述车辆和/或所述挂车的底盘的倾斜、所述车辆和/或所述挂车中的零件的倾斜、所述车辆和/或所述挂车中的振动、和/或所述车辆的速度变化。
72.根据一个实施例,个人通信装置的运动包括第一手势命令,并且其中所述个人通信装置被配置为接收所述第一手势命令、解译所述第一手势命令以及与所述车辆中的车辆控制器合作以执行所述第一手势命令。
73.根据一个实施例,所述车辆和/或所述挂车的所述运动模拟施加到所述个人通信装置的所述第一手势命令或第二手势命令中的一者。
74.根据一个实施例,所述第一手势命令针对在第一方向上移动所述车辆和/或所述挂车,并且所述第二手势命令针对在第二方向上移动所述车辆和/或所述挂车。
75.根据一个实施例,所述传感器是速度传感器、加速度计、车轮传感器、挂车角度传感器或成像装置中的一者。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。