技术特征:
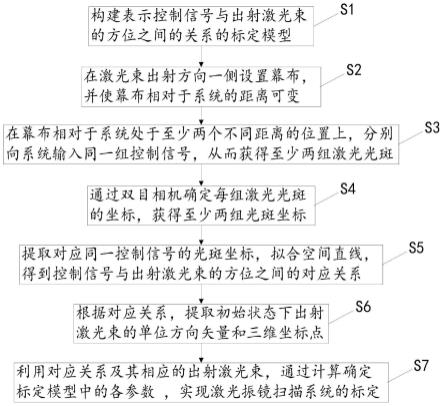
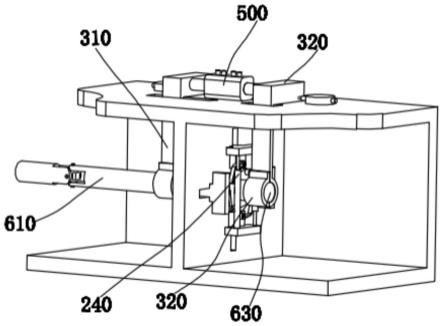
1.一种基于双目相机的激光振镜扫描系统的标定方法,其特征在于:所述系统包括x镜、y镜、旋转装置和控制装置,所述x镜和y镜的转动轴线位置固定,所述旋转装置用于带动所述x镜和所述y镜转动,所述控制装置用于通过控制信号驱动所述旋转装置,所述控制信号包括分别用于控制x镜、y镜转动的x信号、y信号,所述方法用于标定所述控制信号与所述系统发出的出射激光束的方位之间的关系,所述方法包括以下步骤:s1、构建表示所述控制信号与所述系统发出的出射激光束的方位之间的关系的标定模型,所述标定模型包括:α=a1x a2x2 a3x3,β=b1y b2y2 b3y3,r
x
=matrix(cosα u sinα),r
y
=matrix(cosβ v sinβ),l=r
y
r
x
m,q=r
y
(r
x
(p-x) x-y) y;其中,x、y分别表示x镜的转轴、y镜的转轴上的三维坐标点,u、v分别表示x镜的转轴、y镜的转轴的单位方向矢量,p、m分别表示初始状态下出射激光束上的三维坐标点、单位方向矢量,α表示x镜在x信号下相对于初始状态的转动角度,β表示y镜在y信号下相对于初始状态的转动角度,r
x
、r
y
分别表示x镜、y镜对光线的旋转,l表示出射激光束的方向,q表示出射激光束的点坐标位置,所述初始状态为x信号和y信号均为零的状态;s2、在所述系统的激光束出射方向一侧设置幕布,并使所述幕布相对于所述系统的距离可变;s3、在所述幕布相对于所述系统处于至少两个不同距离的位置上,分别向所述系统输入同一组控制信号,从而在所述幕布的每个位置上各获得一组激光光斑;s4、通过双目相机确定每组所述激光光斑的坐标,获得多组光斑坐标;s5、提取对应同一控制信号的光斑坐标,拟合空间直线,得到所述控制信号与所述出射激光束的方位之间的对应关系;s6、根据所述对应关系,提取初始状态下所述出射激光束的单位方向矢量m和三维坐标p;s7、利用所述对应关系,再根据s1中的公式中,计算获得x、y、u、v、a1、a2、a3、b1、b2、b3,从而确定所述标定模型,实现激光振镜扫描系统的标定。2.根据权利要求1所述的标定方法,其特征在于:所述标定方法还包括参数优化步骤,所述参数优化步骤包括:s8、取目标函数为由所述标定模型计算出的出射激光束的方向与实测的出射激光束的方向间的差值的平方和,通过非线性优化算法优化u、v、m;s9、取目标函数为由所述标定模型计算出的出射激光束的点坐标位置与实测的出射激光束的点坐标位置间的差值的平方和,通过非线性优化算法优化x、y、p;s10、取目标函数为所述标定模型计算出的出射激光束的点坐标位置与实测的出射激光束的点坐标位置间的差值的平方和,通过非线性优化算法优化a1、a2、a3、b1、b2、b3。3.根据权利要求1所述的标定方法,其特征在于:所述的同一组控制信号通过以下方式获得:
保持y信号不变,使x信号发生变化而获得多个第一控制信号;保持x信号不变,使y信号发生变化而获得多个第二控制信号。4.根据权利要求3所述的标定方法,其特征在于:在s7中,通过以下步骤计算标定模型的参数:将多个所述第一控制信号带入模型后计算获得a1、a2、a3和u;将多个所述第二控制信号带入模型后计算获得b1、b2、b3和v。5.根据权利要求1所述的标定方法,其特征在于:所述x、y、u、v均为不随控制信号的变化而变化的固定参数。6.根据权利要求5所述的标定方法,其特征在于:所述u通过以下公式计算获得:其中,为u与z轴的夹角,θ为u在xy平面上的投影与x轴的夹角。7.根据权利要求2所述的标定方法,其特征在于:所述x、y分别表示x镜的转轴与y镜的转轴上距离最近的两点,且两者之间的距离为d,则有公式y=x d(u
×
v)。8.根据权利要求7所述的标定方法,其特征在于:在s9中,还包括把d作为优化的参数,从而通过x和d算出y。9.一种计算机可读存储介质,存储有计算机程序,其特征在于:所述计算机程序被处理器运行时执行如权利要求1-8任一项所述的方法。
技术总结
本发明公开了一种基于双目相机的激光振镜扫描系统的标定方法,属于振镜标定领域,该方法能够标定振镜与双目相机的相对位置关系以及振镜自身的几何模型参数,可用于将激光投射到指定的三维目标方位。主要步骤有:构建标定模型,采集标定数据,处理标定数据得到出射激光束与振镜的控制信号间的对应关系,分步求解标定模型的参数。相比现有文献中已发表的方法,本发明的创新点在于所建立的振镜几何模型,不限定入射激光束的角度以及两面反射镜之间的位置关系,同时减少了标定模型的参数数量,提高了振镜的标定精度。使得本发明的方法在激光打标、3D打印、激光投影和激光加工等领域有极高的应用价值。域有极高的应用价值。域有极高的应用价值。
技术研发人员:刘俊峰 王彦斌
受保护的技术使用者:德特克(上海)数字技术有限责任公司
技术研发日:2022.02.15
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。