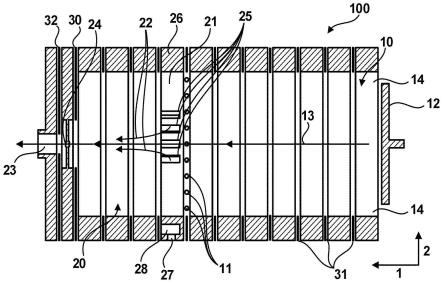
1.本发明涉及一种用于通过激光雷达系统对对象进行补充探测的方法,其中,该激光雷达系统设置为用于扫描空间角度区域(raumwinkelbereich),以便对环境对象执行初始距离确定方法,其中,该激光雷达系统包括至少一个发射器单元和至少一个探测器单元,并且其中,该发射器单元向空间角度区域的空间角度带(raumwinkel-streifen)发出至少一个激光射束,其中,由环境对象所反射的激光被探测器单元接收,以便借助初始距离确定方法求取环境对象的距离和位置。本发明此外涉及一种包括控制单元的激光雷达系统,该控制单元设置为用于实施这种方法。
背景技术:
2.在未来几年,高度自动化的和完全自动化的车辆(级别3-5)将越来越多地出现在道路上。目前,例如针对交通拥堵状况或者说一般地针对快速公路(kraftfahrstraβen)上的驾驶状况对各种各样的自主驾驶功能进行研发。所有这些系统通常结合各种各样的传感器(例如视频摄像机、激光雷达传感器、雷达传感器、超声波传感器)。尤其激光雷达传感器在自主行驶的车辆中将发挥着越来越重要的作用。
3.对于及时并准确地识别环境对象所需的对激光雷达传感器的高点速率使得同时对多个测量点的测量是必要的——这在此被称为测量的平行化(parallelisierung)。在此,例如可以使用垂直的激光带(也称“vertical flash lidar,垂直闪光激光雷达”)对待测量的场景进行照明,并在接收路径中映射到垂直探测器阵列上,使得探测器单元的每个探测器元件(探测器像素)覆盖空间中的一个测量点。通过这种平行化将测量时间强烈缩短,因为同时对(在具有一定的水平延伸尺度的空间角度带中的)完整的点列进行测量(根据相同的原理能够平行地对点/探测器元件/探测器像素的行甚至2d布置进行测量)。
4.然而,在这种解决方案中的激光雷达传感器也强烈地易发生列内的光学信号的串扰(也称高光溢出(blooming))的影响。该串扰对于高反射的目标、例如进行逆反射的对象(例如交通标志)尤其强烈,所述目标在某些情况下也可能触发该列的其他测量点。在这种情况下,待测量的对象在点云中显得强烈增大,而在某些情况下甚至覆盖整个垂直视场角(field-of-view)。在这种情况下,激光雷达传感器在一定的区域内(例如在进行逆反射的龙门架下)将是无辨识能力的。因此需要研发能够实现高度的平行化而同时避免由于高光溢出所导致的辨识能力丧失(blindheit)的激光雷达架构。
5.由于非常高的信号强度所导致的高光溢出效应的出现可以归因于信号路径中的散射过程,例如由于特定像素类型的像素之间的电荷迁移,例如由于在最初映射的探测器像素中的如下电荷过多:所述电荷被输出到划界探测器像素中并在所述探测器像素中产生探测失误。对于所有的探测器技术都可能发生高光溢出,然而其中,不同的探测器技术面临不同的挑战。
6.因此例如spad探测器(einzelphotonen-lawinendioden,单光子雪崩二极管)在检测到光子后典型地具有一定的死区时间(totzeit),如此使得在所探测到的高光溢出点后
方形成死区,在该死区中激光雷达传感器不能够探测到对象(视车速而定典型地为1-30m)。另一方面,apd(lawinen-fotodioden,雪崩光电二极管)有时以动态匹配当前信号强度的电压运行(例如参见de 10 2016 124 197 a1)。这可能导致apd由于高光溢出点的高信号强度而更加不敏感地对高光溢出点后方的对象做出反应。
7.此外,(例如由于数据速率的限制)仅能够为每个测量点检测到一个回波的激光雷达传感器,在所探测到的高光溢出点后方永久地无辨识能力。
8.在本技术中,对术语像素、探测器像素和探测器元件可互换地进行使用。探测器单元应被理解为由多个(或者说大量的)探测器元件所构成的装置。
技术实现要素:
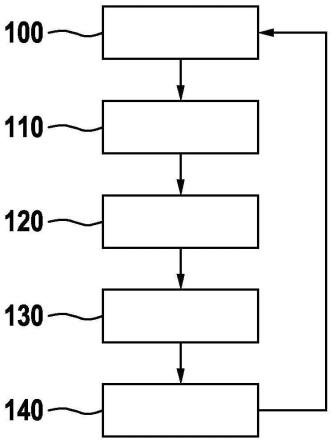
9.根据本发明,提供一种开篇所提及的类型的方法,其包括以下步骤:
[0010]-扫描整个空间角度区域,
[0011]-产生所探测到的信号光的二维强度分布,
[0012]-通过去除高光溢出信号产生经校正的二维强度分布,
[0013]-分析所述经校正的二维强度分布用于除了所述初始距离确定方法外附加地对环境对象进行补充探测。
[0014]
如此理解术语“扫描整个空间角度区域”,即激光雷达系统例如在为初始距离确定方法所应扫描的空间角度区域上实施完全的摆动。但这不一定必须是激光雷达系统的最大可能的空间角度区域,尤其如果激光雷达系统具有(例如针对城市运行、高速公路运行或者说特定速度范围的)不同的角度模式时。
[0015]
初始距离确定方法例如可以是飞行时间激光雷达方法(英语:time-of-flight)或调频连续波激光雷达方法(fmcw-lidar)。
[0016]
根据本发明的解决方案具有如下优点:当初始距离确定方法由于高光溢出效应而短暂地具有盲斑时,能够提供冗余的对象识别(尤其在朝前向方向和在高速下)。特别危险的状况将例如是,在机动车自驾驶的情况下,高速公路行车道上方的进行逆反射的指示牌显示正在接近的拥堵(或暂时降低的限速),而同时由于由指示牌所产生的高光溢出而不再能够在短时间内识别到前方行驶的车辆。在最坏的情况下,这可能导致该自驾驶车辆的滞后的制动,而因此产生事故危险。
[0017]
根据本发明的方法实现,通过在对高光溢出效应校正后对二维图像数据进行分析来对环境对象进行补充探测。这虽然未能实现从经校正的二维强度分布(这些信息,例如通过飞行时间确定,由于高光溢出所导致的部分信号路径中的过载而丢失)中的直接的距离确定,但能够以各种各样的方式实现对环境对象的补充识别,如此使得能够克服初始距离确定方法的短时间失明,而能够避免危险状况。
[0018]
换句话说,本发明利用灰度图(二维强度分布),用于识别在高光溢出效应后方可能存在的对象。在此,灰度图表示来自激光雷达系统的每个测量点的背景光(hintergrundlicht)的2d描述。灰度图因此相当于环境的在激光雷达传感器波长下的摄像机图像。与使用传感器数据融合利用外部摄像机相比,利用激光雷达系统的背景信号的优点在于,每个灰度图值准确对应于与所测量的初始距离确定方法相同的空间角度。由此避免可能的误差,例如校准误差或两个传感器之间的内插误差。同时改善对象探测的冗余。
[0019]
优选地,通过在二维强度分布中搜索对于高光溢出信号来说表征性的空间强度曲线来辨识待去除的高光溢出信号。高光溢出信号示出围绕该高光溢出信号的中心的表征性空间强度曲线,该强度曲线可以借助针对强度分布进行曲线适配来拟合(gefittet)。然后则能够从二维强度分布中减去所计算出一个或多个高光溢出曲线,以便获得经校正的二维强度分布。针对强度分布的曲线适配可以在该二维强度分布中沿着经校正的二维强度分布的一维的测量值列和/或测量值行进行,或者在整个二维强度分布上二维地进行。
[0020]
所述对经校正的二维强度分布的分析步骤优选包括分析经校正的二维强度分布的均匀性。行车道尤其通常示出非常均匀的强度分布(除了行车道标记或道路损坏之外),使得其他车辆在经校正的二维强度分布中显示为明显的不均匀性。该方法因此基于对具有高光溢出效应的图像区域中的灰度值的均匀性的检查,例如在快速公路上的进行逆反射的龙门架下方。根据本发明的方法则能够实现,对其他车辆通过其与行车道不同的反射行为和在经校正的二维强度分布中所引起的不均匀性来进行冗余识别。
[0021]
在一种实施方式中,对经校正的二维强度分布的均匀性的分析沿着所述经校正的二维强度分布的一维的测量值列和/或测量值行进行。为此例如可以研究测量点(或者说探测器元件/探测器像素)的行内的或列内的的灰度值变化走势。若在该区域内不存在对象,则预计由于街道的均匀性而存在相对恒定的灰度值。然而若判定出显著的不均匀性,则可以认为有对象(例如其他车辆)存在。
[0022]
在一种优选的实施方式中,分析经校正的二维强度分布的均匀性的步骤包括在所述经校正的二维强度分布中进行对象识别的步骤。对象识别方法(英语:object recognition)例如可以包括棱边识别、大小识别或与已知模式的模式比较。对象识别也可以使用机器学习方法或基于深度学习的方案,例如维奥拉-琼斯目标检测框架法(viola-jones-methode)、尺度不变特征转换(scale-invariant feature transform,sift)、加速稳健特征(speeded up robust features,surf)或方向梯度直方图(histogram of oriented gradients,hog)。
[0023]
在一种实施方式中,在对象识别的步骤后,对于那些未能够通过激光雷达系统的初始距离确定方法被分配距离的未知对象,通过与经校正的二维强度分布中的已经通过初始距离确定方法被确定了距离的另一已知对象进行大小比较来计算距离。已知对象例如可以是如下对象:该对象水平地与强烈进行反射的对象错开,因此,通过初始距离确定方法对其进行的探测不受到或仅轻微地受到高光溢出效应的影响(例如,龙门架的未被高光溢出覆盖的部分、侧面的行车道边界、较少进行反射的交通标志、其他车道上的车辆等)。在此,与已知大小和距离的已知对象的大小比较相对易于进行,但要求也同时能够辨识出适合的对象。
[0024]
优选地,通过大小比较对距离进行的计算使用以下估算公式:
[0025][0026]
其中,du是未确定对象的距离,db是已确定对象的通过初始距离确定方法所确定的距离,pu是未确定对象的以像素为单位的一维延伸尺度,pb是已确定对象的以像素为单位的相应的一维延伸尺度,au是未确定对象的典型的一维延伸尺度,而ab是已确定对象的典型的一维延伸尺度。即使该估算公式不能够为未确定对象提供精确的距离确定(由于已知对象
的大小变化、角度效应(winkeleffekten)、像素分辨率等),其也至少使得能够实现危险识别和对潜在障碍物的及时识别。另外还可以实现,通过校正因子(例如10-20%)来校正未确定对象的如上文中所计算的距离du,以避免由于该方法固有的不准确性而高估距离,该高估例如可能导致自动驾驶仪的制动信号过迟。在此应注意的是,由于自动驾驶仪的不必要的制动动作所导致的过强烈减速同样可能造成危险状况。校正因子也可以与已确定对象的所辨识出的类型相关,例如,在具有非常标准化的大小的对象类型(特定的交通标志)的情况下比在大小具有较大变化的特定对象类型(例如车辆,尤其小型车相对于suv/货车)的情况下更小。
[0027]
优选地,通过不同的像素行和/或像素列对同一对象进行多次距离确定,并对其结果进行求平均,以便实现经改善的距离确定。由此能够将在特定的像素列内的潜在的对象延伸尺度确定误差平均掉。
[0028]
本发明另外还涉及一种包括控制单元的激光雷达系统,该控制单元设置为用于实施根据前述实施方式中任一个实施方式的方法的步骤。控制单元理解为处理例如传感器信号并据此输出控制信号的设备。根据本发明的方法可以在该控制单元中通过专用集成电路、软件、固件或其组合实现。
[0029]
在一种实施方式中,至少一个探测器单元包括多个探测器元件,所述探测器元件是雪崩光电二极管和/或单光子雪崩二极管。雪崩光电二极管和单光子雪崩二极管由于其非常高的信号灵敏度而在激光雷达系统中非常普遍,但也因此尤其受到高光溢出的负面影响。因此,这种激光雷达系统尤其受益于根据本发明的方法。
[0030]
优选地,激光雷达系统是机动车激光雷达系统,尤其是受道路约束的机动车,例如载客车或载货车或两轮车。
[0031]
本发明的有利扩展方案在于优选实施方式中所列举的措施中进行说明,并在说明书中加以描述。
附图说明
[0032]
参照附图和以下描述更详细地对本发明的实施例进行阐述。附图示出:
[0033]
图1:将根据本发明的方法的一种实施方式作为流程图示出;
[0034]
图2:经校正的二维强度分布的具有沿着水平行和垂直列的强度曲线的示意图;
[0035]
图3和4:距离不同的车辆的不同外观大小的示意图。
具体实施方式
[0036]
图1示出根据本发明的方法的一种实施方式的流程图。首先在步骤100中,扫描整个空间角度区域。在步骤110中,从对整个空间角度区域所进行的该扫描的组合图像数据中产生所探测到的信号光的二维强度分布(灰度图)。在步骤120中,通过去除高光溢出信号产生经校正的二维强度分布。在步骤130中,借助对象识别方法或均匀性分析来分析经校正的二维强度分布,以辨识对象。在步骤140中,在对象辨识步骤后,对那些未能够通过激光雷达系统的初始距离确定方法被分配距离的未确定对象,通过与经校正的二维强度分布中的已经通过初始距离确定方法被确定了距离的另一已确定对象进行大小比较来计算距离。随后,该方法以重新扫描整个空间角度区域来重新开始。
[0037]
图2示出经校正的二维强度分布的示意图(灰度值图),其具有沿着水平行1(x轴)和垂直列2(y轴)的补充强度曲线。该经校正的二维强度分布包括龙门架3(其产生已被去除的高光溢出效应)和车辆4。行1或列2内的强度曲线/灰度值曲线可以单个地或组合地检查。若该区域内不存在对象,则由于通常存在的街道均匀性而预期存在相对恒定的灰度值。然而若判定出显著的不均匀性,如在图1中可以看到的那样,则应认为有对象存在。
[0038]
图3和图4示出在龙门架3下方的距离不同远近的未确定对象4(车辆)的不同的表面看上去的大小的示意图。车辆4在图3中处于龙门架3的下方,而在图4中明显地处于龙门架3的后方,即离开更远。
[0039]
为了计算车辆4的距离,可以通过大小比较使用以下估算公式:
[0040][0041]
其中,du是未确定对象的距离,db是已确定对象的通过初始距离确定方法所确定的距离,pu是未确定对象4(车辆4)的以像素为单位的一维延伸尺度(在此示例性地在垂直方向上),pb是已确定对象3(龙门架3,在此举例为沿垂直方向)的以像素为单位的相应的一维延伸尺度,au是未确定对象4的典型的一维延伸尺度,而ab是已确定对象3的典型的一维延伸尺度。即使该估算公式不能够为未确定对象4提供精确的距离确定(由于已知对象3的大小变化、角度效应、像素分辨率等),其也至少使得能够进行危险识别和对潜在障碍物的及时识别。因此,车辆4在图3中潜在地处于可能会要求自动驾驶仪降低速度的距离,而在图4中所确定的距离潜在地足够大,使得不必须立即进行速度匹配。因此,根据本发明的方法使得能够实现无风险地克服激光雷达系统的初始距离确定方法的短时期“失明”并且不会为此需要附加的外部传感器。因此,激光雷达系统的安全性和冗余得到改善。
[0042]
虽然通过优选的实施例进一步详细地说明且描述了本发明,但是本发明不限于所公开的示例,并且,本领域技术人员能够由此推导出其他变型,而不脱离本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。