1.本发明涉及中心定位方法。
背景技术:
2.为了将半导体晶片等被加工物分割成一个个芯片而使用切削装置(例如参照专利文献1和专利文献2)。
3.上述专利文献1和专利文献2等所示的以往使用的切削装置设有拍摄被加工物的拍摄构件和测定被加工物的高度的检测构件。在以往使用的切削装置中,拍摄构件和检测构件的相对位置关系被预先确定为设计值。
4.专利文献1:日本特开2015-112698号公报
5.专利文献2:日本特开2005-093710号公报
6.但是,上述以往使用的切削装置在拍摄构件和检测构件中的至少一方的安装位置上存在安装误差,由设计值确定的位置关系与实际的位置关系不同。
7.因此,存在如下的问题:即使上述以往使用的切削装置对基于拍摄构件拍摄得到的图像而识别出的位置利用检测构件来检测高度并进行切削加工,也无法准确地进行与检测构件检测出的高度对应的加工。
8.为了解决这种问题,专利文献1提出了通过虚拟芯片测定拍摄构件与检测构件的实际位置关系的方法。但是,在专利文献1所示的方法中,需要虚拟芯片,比较麻烦。
技术实现要素:
9.本发明是鉴于上述问题而完成的,其目的在于,提供能够容易地掌握拍摄构件与检测构件的实际位置关系的中心定位方法。
10.为了解决上述课题并达到目的,本发明的中心定位方法在装置中将检测构件的检测中心定位于拍摄构件的拍摄中心,该装置包含:圆形的卡盘工作台,其对被加工物进行保持;x轴移动构件,其使该卡盘工作台在x轴方向上移动;所述拍摄构件,其对该卡盘工作台所保持的被加工物进行拍摄;第一y轴移动构件,其使该拍摄构件在y轴方向上移动;所述检测构件,其对该卡盘工作台所保持的被加工物的高度进行检测;以及第二y轴移动构件,其使该检测构件在y轴方向上移动,其特征在于,该中心定位方法构成为包含如下的工序:第一中心坐标检测工序,使该x轴移动构件和该第一y轴移动构件进行动作并根据该拍摄构件拍摄得到的图像来求出该卡盘工作台的中心的坐标(x1,y1);第二中心坐标检测工序,使该x轴移动构件和该第二y轴移动构件进行动作并根据该检测构件的检测结果来求出该卡盘工作台的中心的坐标(x2,y2);坐标间距离计算工序,将基于该拍摄构件拍摄得到的图像而求出的该卡盘工作台的中心的x坐标设为x1,将基于该检测构件的检测结果而求出的该卡盘工作台的中心的x坐标设为x2,将中心间的距离α作为(x1-x2)来求出,并且将基于该拍摄构件拍摄得到的图像而求出的该卡盘工作台的中心的y坐标设为y1,将基于该检测构件的检测结果而求出的该卡盘工作台的中心的y坐标设为y2,将中心间的距离β作为(y1-y2)来
求出;以及中心一致工序,在将该拍摄构件的拍摄中心定位于x0、y0的坐标时,将该检测构件的检测中心定位于x0-α、y0-β的坐标而使该拍摄构件的拍摄中心与该检测构件的检测中心一致。
11.在所述中心定位方法中,也可以是,该第一中心坐标检测工序利用拍摄构件对比该卡盘工作台的中心靠外周侧的特征点进行拍摄,求出该特征点的坐标(x11,y11),并且使该卡盘工作台旋转任意的角度而对该特征点进行拍摄,求出该特征点的坐标(x12,y12),将在垂直通过所求出的特征点的坐标(x11,y11)与特征点的坐标(x12,y12)的中心的一次函数上距离该中心为2个坐标间的距离的1/2的位置的坐标作为该卡盘工作台的中心的坐标(x1,y1)来求出,该第二中心坐标检测工序检测被定位于检测结果急剧变化的卡盘工作台的外周的该检测构件的3个点以上的坐标,根据检测出的3个点以上的坐标来求出该卡盘工作台的中心的坐标(x2,y2)。
12.在所述中心定位方法中,也可以是,该第一中心坐标检测工序对包含卡盘工作台的外周在内的区域进行拍摄,根据拍摄到的图像来检测被定位于外周的该拍摄构件的拍摄中心的3个点以上的坐标,根据检测出的3个点以上的坐标来求出该卡盘工作台的中心的坐标(x1,y1),该第二中心坐标检测工序检测被定位于检测结果急剧变化的卡盘工作台的外周的该检测构件的3个点以上的坐标,根据检测出的3个点以上的坐标来求出该卡盘工作台的中心的坐标(x2,y2)。
13.在所述中心定位方法中,也可以是,该拍摄构件配设在与该第一y轴移动构件连结的第一加工构件上,该检测构件配设在与该第二y轴移动构件连结的第二加工构件上。
14.在所述中心定位方法中,也可以是,该第一y轴移动构件和该第二y轴移动构件是1个y轴移动构件,该拍摄构件和该检测构件配设在与该y轴移动构件连结的加工构件上。
15.本发明起到能够容易地掌握拍摄构件与检测构件的实际位置关系的效果。
附图说明
16.图1是示出实施实施方式1的中心定位方法的加工装置的结构例的立体图。
17.图2是示意性地示出图1所示的加工装置的拍摄单元的拍摄中心的俯视图。
18.图3是示意性地示出图1所示的加工装置的检测单元的检测中心的俯视图。
19.图4是示出图1所示的加工装置的拍摄单元的拍摄位置和检测单元的检测位置的坐标系的俯视图。
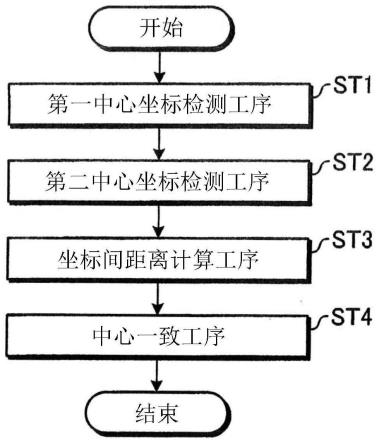
20.图5是示出实施方式1的中心定位方法的流程的流程图。
21.图6是示出在图5所示的第一中心坐标检测工序中拍摄单元对卡盘工作台的保持面的特征点进行拍摄的状态的俯视图。
22.图7是示出在图5所示的第一中心坐标检测工序中拍摄单元对从图6的状态旋转了规定的角度的卡盘工作台的保持面的特征点进行拍摄的状态的俯视图。
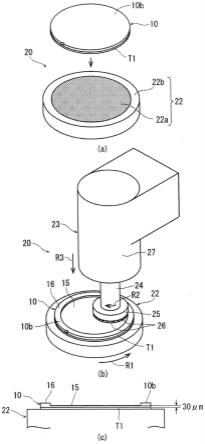
23.图8是示意性地示出在图5所示的定位方法的第二中心坐标检测工序中使检测单元沿着卡盘工作台的保持面移动的状态的侧视图。
24.图9是示出图8所示的检测单元的检测结果的图。
25.图10是示出根据图9所示的检测单元的检测结果而确定的卡盘工作台的外周的三个点的俯视图。
26.图11是示意性地示出在实施方式2的中心定位方法的第一中心坐标检测工序中拍摄单元对卡盘工作台的外周的三个点进行拍摄的状态的俯视图。
27.图12是示出实施实施方式1和实施方式2的中心定位方法的加工装置的结构例的立体图。
28.标号说明
29.1、1-1:加工装置(装置);10:卡盘工作台;12:中心;13:特征点;21:第一切削单元(第一加工构件);21-1:切削单元(加工构件);22:第二切削单元(第二加工构件);30:拍摄单元(拍摄构件);31:图像;32:拍摄中心;40:检测单元(检测构件);42:检测中心;51:x轴移动单元(x轴移动构件);52:第一y轴移动单元(第一y轴移动构件);52-1:y轴移动单元(y轴移动构件);53:第二y轴移动单元(第二y轴移动构件);200:被加工物;st1:第一中心坐标检测工序;st2:第二中心坐标检测工序;st3:坐标间距离计算工序;st4:中心一致工序。
具体实施方式
30.参照附图对用于实施本发明的方式(实施方式)进行详细说明。本发明并不限于以下实施方式中记载的内容。并且,在以下记载的构成要素中包含本领域技术人员所容易想到的、实际上相同的构成要素。而且,以下记载的结构可以适当组合。并且,能够在不脱离本发明的主旨的范围内进行结构的各种省略、置换或变更。
31.〔实施方式1〕
32.根据附图对本发明的实施方式1的中心定位方法进行说明。图1是示出实施实施方式1的中心定位方法的加工装置的结构例的立体图。图2是示意性地示出图1所示的加工装置的拍摄单元的拍摄中心的俯视图。图3是示意性地示出图1所示的加工装置的检测单元的检测中心的俯视图。图4是示出图1所示的加工装置的拍摄单元的拍摄位置和检测单元的检测位置的坐标系的俯视图。图5是示出实施方式1的中心定位方法的流程的流程图。
33.(加工装置)
34.实施方式1的中心定位方法通过作为装置的图1所示的加工装置1来实施。加工装置1是对图1所示的被加工物200进行切削加工的切削装置。在实施方式1中,被加工物200是以硅、蓝宝石、镓等为母材的圆板状的半导体晶片或光器件晶片等晶片。被加工物200在由正面201上形成为格子状的多条分割预定线202划分为格子状的区域中形成有器件203。
35.另外,本发明的被加工物200也可以是中央部被薄化并且在外周部形成有厚壁部的所谓taiko(注册商标)晶片,除了晶片以外,还可以是具有多个由树脂密封的器件的矩形状的封装基板、陶瓷基板、铁氧体基板、或者含有镍和铁中的至少一种的基板等。在实施方式1中,被加工物200的背面204被粘贴在外周缘安装有环状框架205的粘接带206上而被环状框架205支承。
36.图1所示的加工装置1是利用卡盘工作台10保持被加工物200并利用切削刀具23沿着分割预定线202进行切削加工(相当于加工)的切削装置。如图1所示,加工装置1具有:平面形状为圆形的卡盘工作台10,其利用保持面11对被加工物200进行吸引保持;作为第一加工构件的第一切削单元21,其利用切削刀具23对卡盘工作台10所保持的被加工物200进行切削;作为第二加工构件的第二切削单元22,其利用切削刀具23对卡盘工作台10所保持的被加工物200进行切削;作为拍摄构件的拍摄单元30,其对卡盘工作台10所保持的被加工物
200进行拍摄;作为检测构件的检测单元40,其测定卡盘工作台10所保持的被加工物200的高度;以及控制单元100。
37.并且,如图1所示,加工装置1具有使卡盘工作台10和切削单元20相对地移动的移动单元50。移动单元50具有:x轴移动单元51,其将卡盘工作台10在与水平方向平行的x轴方向上进行加工进给;第一y轴移动单元52,其将第一切削单元21和拍摄单元30在与水平方向平行且与x轴方向垂直的y轴方向上进行分度进给;第二y轴移动单元53,其将第一切削单元21和检测单元40在y轴方向上进行分度进给;第一z轴移动单元54,其将第一切削单元21在与垂直于x轴方向和y轴方向这两者的铅垂方向平行的z轴方向上进行切入进给;第二z轴移动单元55,其将第二切削单元22在z轴方向上进行切入进给;以及旋转移动单元56,其使卡盘工作台10绕与z轴方向平行的轴心进行旋转。如图1所示,加工装置1是具有第一切削单元21和第二切削单元22的装置,即是2主轴的切割机、所谓的对置双重式(facing dual type)的切削装置。
38.x轴移动单元51是通过使卡盘工作台10在作为加工进给方向的x轴方向上移动而将卡盘工作台10和切削单元20相对地沿着x轴方向进行加工进给的x轴移动构件。第一y轴移动单元52是通过使第一切削单元21和拍摄单元30在分度进给方向即y轴方向上移动而将卡盘工作台10、第一切削单元21以及拍摄单元30相对地沿着y轴方向进行分度进给的第一y轴移动构件。第二y轴移动单元53是通过使第二切削单元22和检测单元40在分度进给方向即y轴方向上移动而将卡盘工作台10、第二切削单元22以及检测单元40相对地沿着y轴方向进行分度进给的第二y轴移动构件。
39.第一z轴移动单元54是通过使第一切削单元21和拍摄单元30在切入进给方向即z轴方向上移动而将卡盘工作台10、第一切削单元21以及拍摄单元30相对地沿着z轴方向进行切入进给的第一z轴移动构件。第二z轴移动单元55是通过使第二切削单元22和检测单元40在切入进给方向即z轴方向上移动而将卡盘工作台10、第二切削单元22以及检测单元40相对地沿着z轴方向进行切入进给的第二z轴移动构件。
40.x轴移动单元51、y轴移动单元52、53以及z轴移动单元54、55具有以绕轴心旋转自如的方式设置的公知的滚珠丝杠、使滚珠丝杠绕轴心旋转的公知的电动机以及将卡盘工作台10或切削单元20支承为在x轴方向、y轴方向或z轴方向上移动自如的公知的导轨。
41.卡盘工作台10为圆盘形状,对被加工物200进行保持的保持面11由多孔陶瓷等形成。另外,卡盘工作台10被设置成通过x轴移动单元51在切削单元20的下方的加工区域和从切削单元20的下方离开并搬入搬出被加工物200的搬入搬出区域的整个范围内沿x轴方向移动自如,并且被设置成通过旋转移动单元56绕与z轴方向平行的轴心旋转自如。卡盘工作台10与未图示的真空吸引源连接,通过被真空吸引源吸引而对载置于保持面11的被加工物200进行吸引、保持。在实施方式1中,卡盘工作台10隔着粘接带206对被加工物200的背面204侧进行吸引并保持。
42.第一切削单元21和第二切削单元22是将对保持在卡盘工作台10上的被加工物200进行切削的切削刀具23安装成装卸自如的切削构件。第一切削单元21与第一y轴移动单元52连结,相对于保持在卡盘工作台10上的被加工物200被设置成通过第一y轴移动单元52在y轴方向上移动自如,并且被设置成通过第一z轴移动单元54在z轴方向上移动自如。第一切削单元21经由第一y轴移动单元52、第一z轴移动单元54等而设置在从装置主体2竖立设置
的门型的支承框3的一个柱部上。
43.第二切削单元22与第二y轴移动单元53连接,相对于保持在卡盘工作台10上的被加工物200被设置成通过第二y轴移动单元53在y轴方向上移动自如,并且通过第二z轴移动单元55在z轴方向上移动自如。第二切削单元22经由第二y轴移动单元53、第二z轴移动单元55等而设置在支承框3的另一个柱部上。另外,支承框3通过水平梁将柱部的上端彼此连接起来。第一切削单元21和第二切削单元22能够通过y轴移动单元52、53和z轴移动单元54、55将切削刀具23定位于卡盘工作台10的保持面11的任意位置。
44.各切削单元21、22具有:极薄的作为切削磨具的切削刀具23,其具有大致环形形状;主轴壳体24,其被设置成通过y轴移动单元52、53和z轴移动单元54、55在y轴方向和z轴方向上移动自如;以及主轴,其以绕轴心旋转自如的方式设置于主轴壳体24,并且成为在前端安装有切削刀具23的旋转轴。
45.拍摄单元30配设于第一切削单元21。在实施方式1中,拍摄单元30以与第一切削单元21一体地移动的方式固定于第一切削单元21。拍摄单元30具有多个拍摄元件,该拍摄元件对保持在卡盘工作台10上的切削前的被加工物200的待分割区域进行拍摄。拍摄元件例如是ccd(charge-coupled device)拍摄元件或cmos(complementary mos)拍摄元件。拍摄单元30对保持在卡盘工作台10上的被加工物200进行拍摄而得到用于执行对被加工物200和切削刀具23进行对位的对准等的在图2中示出一例的图像31,将得到的图像31输出到控制单元100。
46.另外,在实施方式1中,如图2所示,拍摄单元30所拍摄的图像31是长边方向与y轴方向平行且短边方向与x轴方向平行的矩形。另外,拍摄单元30的拍摄中心32是指图像31的x轴方向和y轴方向各自的中心。拍摄单元30沿着z轴方向与拍摄中心32即表示图像31的中心的位置相对。
47.检测单元40配设于第二切削单元22。在实施方式1中,拍摄单元30以与第二切削单元22一体地移动的方式固定于第二切削单元22。在实施方式1中,检测单元40是检测保持在卡盘工作台10上的被加工物200的高度即z轴方向的位置的背压传感器,但在本发明中,并不限于背压传感器,也可以是激光位移计或接触式的传感器。检测单元40检测图3所示的检测范围41内的检测中心42的高度即z轴方向的位置并将检测结果输出到控制单元100。
48.另外,在实施方式1中,如图3所示,检测单元40的检测范围41为圆形。另外,检测单元40的检测中心42是指检测范围41的x轴方向和y轴方向各自的中心。检测单元40沿着z轴方向与表示检测中心42的位置相对。
49.并且,加工装置1具有:x轴方向位置检测单元61,其用于检测卡盘工作台10的x轴方向的位置;第一y轴方向位置检测单元62,其用于检测第一切削单元21和拍摄单元30的y轴方向的位置;第二y轴方向位置检测单元63,其用于检测第二切削单元22和检测单元40的y轴方向的位置;第一z轴方向位置检测单元64,其用于检测第一切削单元21和拍摄单元30的z轴方向的位置;以及第二z轴方向位置检测单元65,其用于检测第二切削单元22和检测单元40的z轴方向的位置。
50.x轴方向位置检测单元61和y轴方向位置检测单元62、63能够由与x轴方向或y轴方向平行的线性标尺和读取头构成。z轴方向位置检测单元64、65通过z轴移动单元54、55的电动机的脉冲来检测切削单元21、22的z轴方向的位置。x轴方向位置检测单元61、y轴方向位
置检测单元62、63以及z轴方向位置检测单元64、65将卡盘工作台10的x轴方向、切削单元20、拍摄单元30以及检测单元40的y轴方向或z轴方向的位置输出到控制单元100。
51.另外,在实施方式1中,z轴方向的位置是以卡盘工作台10的保持面11为基准位置根据距离保持面11的高度来确定的。并且,在实施方式1中,由第一切削单元21和拍摄单元30的x轴方向和y轴方向确定的坐标系301(以下,记作第一坐标系)和第二切削单元22和检测单元40的x轴方向和y轴方向的坐标系302(以下,记作第二坐标系)如图4所示那样x轴方向相同且y轴方向互不相同。
52.在实施方式1中,第一切削单元21和拍摄单元30的x轴方向和y轴方向的位置是由从在第一坐标系301中预先确定的基准位置301-1(在图4中示出一例,以下称为第一基准位置)起的与x轴方向和y轴方向的水平方向平行的距离来确定的。并且,第二切削单元22和检测单元40的x轴方向和y轴方向的位置由从在第二坐标系302中预先确定的基准位置302-1(在图4中示出一例,以下称为第二基准位置)起的与x轴方向和y轴方向的水平方向平行的距离来确定的。
53.控制单元100对加工装置1的各结构要素分别进行控制而使加工装置1实施针对被加工物200的加工动作。另外,控制单元100是计算机,其具有:运算处理装置,其具有cpu(central processing unit)那样的微处理器;存储装置,其具有rom(read only memory)或ram(random access memory)那样的存储器;以及输入输出接口装置。控制单元100的运算处理装置根据存储于存储装置的计算机程序来实施运算处理,将用于控制加工装置1的控制信号经由输入输出接口装置而输出到加工装置1的各结构要素。
54.控制单元100与由显示加工动作的状态、图像等的液晶显示装置等构成的未图示的显示单元、在操作人员登记加工内容信息等时使用的未图示的输入单元连接。输入单元由设置于显示单元的触摸面板和键盘等外部输入装置中的至少一个构成。
55.另外,如图1所示,控制单元100具有中心坐标检测部101、坐标系匹配部102以及加工控制部103。中心坐标检测部101和坐标系匹配部102求出第一坐标系301与第二坐标系302的相对关系。
56.中心坐标检测部101使用在第一坐标系301中拍摄单元30拍摄得到的图像31来求出卡盘工作台10的中心12(图4所示)的坐标(x1,y1)。中心坐标检测部101使用在第二坐标系302中检测单元40的检测结果,求出在第一坐标系301中被定位于求出了中心12的坐标(x1,y1)的位置的卡盘工作台10的中心12的坐标(x2,y2)。
57.坐标系匹配部102根据在第一坐标系301中求出的卡盘工作台10的中心12的坐标(x1,y1)和在第二坐标系302中求出的卡盘工作台10的中心12的坐标(x2,y2),求出第一坐标系301与第二坐标系302的关系。
58.加工控制部103存储拍摄中心32与第一切削单元21的切削刀具23的切削刃的下端的相对位置、检测中心42与第二切削单元22的切削刀具23的切削刃的下端的相对位置。加工控制部103使用由坐标系匹配部102求出的第一坐标系301与第二坐标系302的关系、预先存储的相对位置,根据拍摄单元30拍摄到的图像31、检测单元40的检测结果、x轴方向位置检测单元61和y轴方向位置检测单元62、63的检测结果,以使拍摄中心32与检测中心42一致的方式、即使拍摄单元30拍摄到的位置与检测单元40所检测出的位置一致的方式对各构成要素进行控制,从而对加工装置1的加工动作进行控制。
59.另外,中心坐标检测部101、坐标系匹配部102以及加工控制部103的功能通过运算处理装置执行存储在存储装置中的计算机程序来实现。
60.(中心定位方法)
61.中心定位方法是在新安装了卡盘工作台10、拍摄单元30以及检测单元40中的至少一个的情况、由于消耗或不良情况而更换了卡盘工作台10、拍摄单元30以及检测单元40中的至少一个的情况下等实施的。中心定位方法是将检测单元40的检测中心42定位于拍摄单元30的拍摄中心32的方法,即求出第一坐标系301与第二坐标系302的关系的方法,是使拍摄单元30拍摄到的位置与检测单元40检测出的位置一致的方法。当控制单元100从操作人员受理中心定位方法的开始指示时,加工装置1开始中心定位方法。如图5所示,中心定位方法构成为包含第一中心坐标检测工序st1、第二中心坐标检测工序st2、坐标间距离计算工序st3以及中心一致工序st4。
62.(第一中心坐标检测工序)
63.图6是示出在图5所示的第一中心坐标检测工序中拍摄单元对卡盘工作台的保持面的特征点进行拍摄的状态的俯视图。图7是示出在图5所示的第一中心坐标检测工序中拍摄单元对从图6的状态起旋转了规定的角度的卡盘工作台的保持面的特征点进行拍摄的状态的俯视图。
64.第一中心坐标检测工序st1是使x轴移动单元51和第一y轴移动单元52进行动作并根据拍摄单元30拍摄到的图像31求出第一坐标系301中的卡盘工作台10的中心12的坐标(x1,y1)的工序。在第一中心坐标检测工序st1中,操作人员操作输入单元而使x轴移动单元51和第一y轴移动单元52进行动作,使能够与保持面11的其他部分识别且比中心12靠外周侧的特征点13在z轴方向上与拍摄单元30相对。
65.在第一中心坐标检测工序st1中,操作人员操作输入单元,如图6所示,通过拍摄单元30拍摄特征点13。于是,在第一中心坐标检测工序st1中,控制单元100的中心坐标检测部101根据x轴方向位置检测单元61和第一y轴方向位置检测单元62的检测结果,求出第一坐标系301中的特征点13的坐标(x11,y11)。
66.在第一中心坐标检测工序st1中,操作人员操作输入单元,使旋转移动单元56进行动作,如图7所示,使卡盘工作台10绕轴心旋转任意的规定的角度θ。另外,在实施方式1中,规定的角度θ是90度,但在本发明中并不限定于90度。
67.在第一中心坐标检测工序st1中,操作人员操作输入单元,使x轴移动单元51和第一y轴移动单元52进行动作,使保持面11的特征点13在z轴方向上与拍摄单元30相对。在第一中心坐标检测工序st1中,操作人员操作输入单元,通过拍摄单元30拍摄特征点13。于是,在第一中心坐标检测工序st1中,控制单元100的中心坐标检测部101根据x轴方向位置检测单元61和第一y轴方向位置检测单元62的检测结果,求出第一坐标系301中的特征点13的坐标(x12,y12)。
68.在第一中心坐标检测工序st1中,控制单元100的中心坐标检测部101使用下述的式1求出特征点13的2个坐标(x11,y11)、坐标(x12,y12)之间的距离d。
[0069][0070]
在第一中心坐标检测工序st1中,控制单元100的中心坐标检测部101使用下述的式2求出由坐标(x11,y11)规定的位置与卡盘工作台10的中心12之间的距离r。
[0071][0072]
在第一中心坐标检测工序st1中,控制单元100的中心坐标检测部101使用下述的式3和式4求出第一坐标系301中的卡盘工作台10的中心12的坐标(x1,y1)。
[0073][0074][0075]
这样,在实施方式1的中心定位方法的第一中心坐标检测工序st1中,将在直线15上通过中心12和各坐标(x11,y11)及坐标(x12,y12)的直线17、18彼此所成的角度为θ的位置的坐标作为卡盘工作台10的中心12的坐标(x1,y1)来求出,其中,该直线15通过所求出的特征点13的坐标(x11,y11)与特征点13的坐标(x12,y12)的中心16并且相对于连接坐标(x11,y11)和坐标(x12,y12)的直线14垂直。这样,实施方式1的中心定位方法的第一中心坐标检测工序st1将在垂直通过所求出的特征点13的坐标(x11,y11)与特征点13的坐标(x12,y12)的中心12的一次函数上距离中心为2个坐标(x11,y11)、(x12,y12)之间的距离d的1/2的位置的坐标作为卡盘工作台10的中心12的坐标(x1,y1)来求出。
[0076]
(第二中心坐标检测工序)
[0077]
图8是示意性地示出在图5所示的定位方法的第二中心坐标检测工序中使检测单元沿着卡盘工作台的保持面移动的状态的侧视图。图9是示出图8所示的检测单元的检测结果的图。图10是示出根据图9所示的检测单元的检测结果而确定的卡盘工作台的外周的三个点的俯视图。
[0078]
第二中心坐标检测工序st2是使x轴移动单元51和第二y轴移动单元53进行动作并根据检测单元40的检测结果来求出第二坐标系302中的卡盘工作台10的中心12的坐标(x2,y2)的工序。在第二中心坐标检测工序st2中,操作人员操作输入单元,使x轴移动单元51和第二y轴移动单元53进行动作,如图8所示,一边使检测单元40沿着保持面11移动,一边利用检测单元40检测保持面11的z轴方向的位置。
[0079]
于是,在检测单元40的检测结果中,如图9所示,产生z轴方向的位置急剧变化的位置19。另外,图9的横轴表示从规定的位置起的与保持面11平行的方向的距离,图9的纵轴表示检测单元40检测出的z轴方向的位置。另外,图9的纵轴表示随着朝向图9中的上侧而位于上方。另外,检测结果急剧变化时的检测单元40的位置19相当于被定位在比卡盘工作台10的外缘靠外周的位置。
[0080]
在第二中心坐标检测工序st2中,控制单元100的中心坐标检测部101根据检测单元40的检测结果,确定检测结果急剧变化时的检测单元40的3个点以上的位置19-1、19-2、19-3。在实施方式1中,在第二中心坐标检测工序st2中,如图10所示,控制单元100的中心坐标检测部101确定检测结果急剧变化时的检测单元40的位置19-1、19-2、19-3这3个点,但在本发明中,所确定的位置19-1、19-2、19-3不限于3个点。
[0081]
在第二中心坐标检测工序st2中,控制单元100的中心坐标检测部101根据x轴方向
位置检测单元61和第二y轴方向位置检测单元63的检测结果,求出所确定的3个点的位置19-1在第二坐标系302中的坐标(x21,y21)、位置19-2的坐标(x22,y22)以及位置19-3的坐标(x22,y22)。
[0082]
这里,当将第二坐标系302中的卡盘工作台10的中心12的坐标设为(x2,y2),将通过三个点的位置19-1、19-2、19-3的圆的半径设为r时,下述的式5成立。
[0083]
(x-x2)2 (y-y2)2=r2…
(式5)
[0084]
在第二中心坐标检测工序st2中,控制单元100的中心坐标检测部101将各坐标(x21,y21)、(x22,y22)以及(x22,y22)代入式5的x、y中而求出第二坐标系302中的卡盘工作台10的中心12的坐标(x2,y2)。
[0085]
这样,实施方式1的中心定位方法的第二中心坐标检测工序st2检测被定位于检测结果急剧变化的卡盘工作台10的外周的检测单元40的3个点以上的位置19-1、19-2、19-3的坐标(x21,y21)、(x22,y22)以及(x22,y22),根据检测出的3个点以上的位置19-1、19-2、19-3的坐标(x21,y21)、(x22,y22)以及(x22,y22)来求出第二坐标系302中的卡盘工作台10的中心12的坐标(x2,y2)。
[0086]
(坐标间距离计算工序)
[0087]
坐标间距离计算工序st3是如下的工序:将基于拍摄单元30拍摄得到的图像31而求出的第一坐标系301中的卡盘工作台10的中心12的x坐标设为x1,将基于检测单元40的检测结果而求出的第二坐标系302中的卡盘工作台10的中心12的x坐标设为x2,将中心12之间的距离α作为(x1-x2)来求出,并且将基于拍摄单元30拍摄得到的图像31而求出的第一坐标系301中的卡盘工作台10的中心12的y坐标设为y1,将基于检测单元40的检测结果而求出的第二坐标系302中的卡盘工作台10的中心的y坐标设为y2,将中心12之间的距离β作为(y1-y2)来求出。在坐标间距离计算工序st3中,控制单元100的坐标系匹配部102计算x1-x2而计算距离α,计算y1-y2而计算距离β。
[0088]
(中心一致工序)
[0089]
中心一致工序st4是在将拍摄单元30的拍摄中心32定位在x0、y0的坐标时,将检测单元40的检测中心42定位在x0-α、yo-β的坐标而使拍摄单元30的拍摄中心32与检测单元40的检测中心42一致的工序。在中心一致工序st4中,在将拍摄单元30的拍摄中心32在第一坐标系301中的坐标设为(x0,y0),将检测单元40的检测中心42在第2坐标系中的坐标设为(x02,y02)时,控制单元100的坐标系匹配部102使用以下的式6和式7将检测单元40的检测中心42的坐标系从第二坐标系302变换为第一坐标系301。
[0090]
x02=x0-α
…
(式6)
[0091]
y02=y0-β
…
(式7)
[0092]
这样,在中心一致工序st4中,在控制单元100的坐标系匹配部102将检测单元40的检测中心42的坐标系从第二坐标系302变换为第一坐标系301而将拍摄单元30的拍摄中心32定位于作为坐标(x0,y0)的位置时,将检测单元40的检测中心42定位于作为坐标(x0-α,yo-β)的位置,从而使第一坐标系301中的拍摄单元30的拍摄中心32与第二坐标系302中的检测单元40的检测中心42一致。另外,在中心一致工序st4中,控制单元100的坐标系匹配部102使用式6和式7将坐标(x0,y0)和坐标(x02,y02)中的任意一方设为任意的坐标,从而如式6和式7所示的那样求出第一坐标系301的任意的坐标(x0,y0)与第二坐标系302的任意的
坐标(x02,y02)之间的关系,并结束定位方法。
[0093]
(加工装置的加工动作)
[0094]
在加工装置1中,操作人员将加工内容信息登记在控制单元100中,将切削加工前的被加工物200载置在卡盘工作台10的保持面11上。然后,加工装置1在有来自操作人员的加工动作的开始指示的情况下开始加工动作。当开始加工动作时,加工装置1隔着粘接带206将背面204侧吸引保持在卡盘工作台10的保持面11上。
[0095]
在加工动作中,加工装置1的x轴移动单元51使卡盘工作台10朝向加工区域移动,拍摄单元30对被加工物200进行拍摄,根据拍摄单元30拍摄得到的图像31来执行对准。另外,检测单元40检测被加工物200的z轴方向的位置。
[0096]
加工装置1一边使被加工物200和切削单元20沿着分割预定线202相对地移动,一边使切削刀具23切入各分割预定线202而将被加工物200分割为一个个器件203。加工装置1在沿着分割预定线202对被加工物200进行切削加工时,控制单元100的加工控制部103使用上述式6和式7,以使拍摄单元30拍摄到的位置与检测单元40检测出的位置一致的方式对各构成要素进行控制,从而对加工装置1的加工动作进行控制。加工装置1对所有的分割预定线202进行切削,当将被加工物200分割成一个个器件203时结束加工动作。
[0097]
如以上说明的那样,实施方式1的中心定位方法根据拍摄单元30拍摄得到的图像31、检测单元40的检测结果、各位置检测单元61、62、63的检测结果,能够求出第一坐标系301中的拍摄单元30的拍摄中心32的坐标(x0,y0)与检测单元40的检测中心42的坐标(x02,y02)之间的关系,能够在卡盘工作台10什么也没载置的状态下掌握拍摄单元30与检测单元40的位置关系。其结果是,实施方式1的中心定位方法起到能够容易地掌握拍摄单元30与检测单元40的实际位置关系的效果。
[0098]
〔实施方式2〕
[0099]
根据附图对本发明的实施方式2的中心定位方法进行说明。图11是示意性地示出在实施方式2的中心定位方法的第一中心坐标检测工序中拍摄单元对卡盘工作台的外周的三个点进行拍摄的状态的俯视图。另外,在图11中,对与实施方式1相同的部分标注相同的标号而省略说明。实施方式2的中心定位方法除了第一中心坐标检测工序st1与实施方式1不同以外,其他部分与实施方式1相同。
[0100]
在实施方式2的第一中心坐标检测工序st1中,操作人员操作输入单元,使x轴移动单元51和第一y轴移动单元52进行动作,从而使卡盘工作台10的外周在z轴方向上与拍摄单元30对置。在实施方式2的第一中心坐标检测工序st1中,操作人员操作输入单元,通过旋转移动单元56使卡盘工作台10间歇地旋转规定的角度,在卡盘工作台10的停止期间利用拍摄单元30对包含卡盘工作台10的外周在内的区域33进行三处以上的拍摄。在实施方式2中,利用拍摄单元30对区域33进行3处拍摄,但在本发明中不限于3处。
[0101]
在实施方式2的第一中心坐标检测工序st1中,控制单元100的中心坐标检测部101根据x轴方向位置检测单元61和第一y轴方向位置检测单元62的检测结果,求出拍摄单元30拍摄各区域33时的拍摄中心32的位置32-1的坐标(x13,y13)、位置32-2的坐标(x14,y14)以及位置32-3的坐标(x15,y15)。
[0102]
在实施方式2的第一中心坐标检测工序st1中,控制单元100的中心坐标检测部101将各坐标(x13,y13)、(x14,y14)以及(x15,y15)代入到式5的x、y中,求出第一坐标系301中
的卡盘工作台10的中心12的坐标(x1,y1)。
[0103]
这样,实施方式2的中心定位方法的第一中心坐标检测工序st1对包含卡盘工作台10的外周在内的区域进行拍摄,根据拍摄到的图像31,检测被定位于外周的拍摄单元30的拍摄中心32的3个点以上的坐标(x13,y13)、(x14,y14)以及(x15,y15),根据检测出的3个点以上的坐标(x13,y13)、(x14,y14)以及(x15,y15)求出卡盘工作台10的中心12的坐标(x1,y1)。
[0104]
实施方式2的中心定位方法根据拍摄单元30拍摄得到的图像31、检测单元40的检测结果、各位置检测单元61、62、63的检测结果,能够掌握拍摄单元30与检测单元40的位置关系。其结果是,与实施方式1同样,实施方式1的中心定位方法起到能够容易地掌握拍摄单元30与检测单元40的实际位置关系的效果。
[0105]
【变形例】
[0106]
根据附图对本发明的实施方式1和实施方式2的变形例的中心定位方法进行说明。图12是示出实施实施方式1和实施方式2的中心定位方法的加工装置的结构例的立体图。另外,在图12中,对与实施方式1相同的部分标注相同的标号而省略说明
[0107]
变形例的中心定位方法除了由加工装置1-1实施以外,与实施方式1相同,其中,如图12所示,加工装置1-1是切削单元21-1、y轴移动单元52-1、z轴移动单元54-1、y轴方向位置检测单元62-1、z轴方向位置检测单元64-1分别仅具有一个并且检测单元40配设于切削单元21-1的装置。
[0108]
图12所示的加工装置1-1的切削单元21-1的结构与实施方式1等的第一切削单元21的结构相同,y轴移动单元52-1的结构与实施方式1等的第一y轴移动单元52的结构相同,z轴移动单元54-1的结构与实施方式1等的第一z轴移动单元54的结构相同,y轴方向位置检测单元62-1的结构与实施方式1等的第一y轴方向位置检测单元62的结构相同,z轴方向位置检测单元64-1的结构与实施方式1等的第一z轴方向位置检测单元64的结构相同。
[0109]
这样,在变形例中,第一y轴移动单元52和第二y轴移动单元53是作为一个y轴移动单元的y轴移动单元52-1,拍摄单元30和检测单元40配设在与y轴移动单元52-1连结的加工构件即切削单元21-1上。
[0110]
变形例的中心定位方法根据拍摄单元30拍摄得到的图像31、检测单元40的检测结果、各位置检测单元61、62、63的检测结果,能够掌握拍摄单元30与检测单元40的位置关系。其结果是,与实施方式1同样,实施方式1的中心定位方法起到能够容易地掌握拍摄单元30与检测单元40的实际位置关系的效果。
[0111]
另外,本发明并不限定于上述实施方式。即,可以在不脱离本发明的主旨的范围内进行各种变形而实施。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。