技术特征:
1.一种中心定位方法,在装置中将检测构件的检测中心定位于拍摄构件的拍摄中心,该装置包含:圆形的卡盘工作台,其对被加工物进行保持;x轴移动构件,其使该卡盘工作台在x轴方向上移动;所述拍摄构件,其对该卡盘工作台所保持的被加工物进行拍摄;第一y轴移动构件,其使该拍摄构件在y轴方向上移动;所述检测构件,其对该卡盘工作台所保持的被加工物的高度进行检测;以及第二y轴移动构件,其使该检测构件在y轴方向上移动,其中,该中心定位方法构成为包含如下的工序:第一中心坐标检测工序,使该x轴移动构件和该第一y轴移动构件进行动作并根据该拍摄构件拍摄得到的图像来求出该卡盘工作台的中心的坐标(x1,y1);第二中心坐标检测工序,使该x轴移动构件和该第二y轴移动构件进行动作并根据该检测构件的检测结果来求出该卡盘工作台的中心的坐标(x2,y2);坐标间距离计算工序,将基于该拍摄构件拍摄得到的图像而求出的该卡盘工作台的中心的x坐标设为x1,将基于该检测构件的检测结果而求出的该卡盘工作台的中心的x坐标设为x2,将中心间的距离α作为(x1-x2)来求出,并且将基于该拍摄构件拍摄得到的图像而求出的该卡盘工作台的中心的y坐标设为y1,将基于该检测构件的检测结果而求出的该卡盘工作台的中心的y坐标设为y2,将中心间的距离β作为(y1-y2)来求出;以及中心一致工序,在将该拍摄构件的拍摄中心定位于x0、y0的坐标时,将该检测构件的检测中心定位于x0-α、y0-β的坐标而使该拍摄构件的拍摄中心与该检测构件的检测中心一致。2.根据权利要求1所述的中心定位方法,其中,该第一中心坐标检测工序利用拍摄构件对比该卡盘工作台的中心靠外周侧的特征点进行拍摄,求出该特征点的坐标(x11,y11),并且使该卡盘工作台旋转任意的角度而对该特征点进行拍摄,求出该特征点的坐标(x12,y12),将在垂直通过所求出的特征点的坐标(x11,y11)与特征点的坐标(x12,y12)的中心的一次函数上距离该中心为2个坐标间的距离的1/2的位置的坐标作为该卡盘工作台的中心的坐标(x1,y1)来求出,该第二中心坐标检测工序检测被定位于检测结果急剧变化的卡盘工作台的外周的该检测构件的3个点以上的坐标,根据检测出的3个点以上的坐标来求出该卡盘工作台的中心的坐标(x2,y2)。3.根据权利要求1所述的中心定位方法,其中,该第一中心坐标检测工序对包含卡盘工作台的外周在内的区域进行拍摄,根据拍摄到的图像来检测被定位于外周的该拍摄构件的拍摄中心的3个点以上的坐标,根据检测出的3个点以上的坐标来求出该卡盘工作台的中心的坐标(x1,y1),该第二中心坐标检测工序检测被定位于检测结果急剧变化的卡盘工作台的外周的该检测构件的3个点以上的坐标,根据检测出的3个点以上的坐标来求出该卡盘工作台的中心的坐标(x2,y2)。4.根据权利要求1所述的中心定位方法,其中,
该拍摄构件配设在与该第一y轴移动构件连结的第一加工构件上,该检测构件配设在与该第二y轴移动构件连结的第二加工构件上。5.根据权利要求1所述的中心定位方法,其中,该第一y轴移动构件和该第二y轴移动构件是1个y轴移动构件,该拍摄构件和该检测构件配设在与该y轴移动构件连结的加工构件上。
技术总结
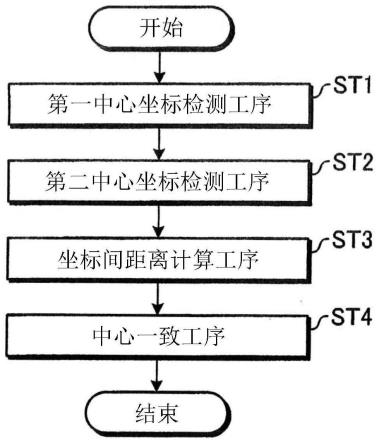
提供中心定位方法,能够容易地掌握拍摄构件与检测构件的实际位置关系。中心定位方法构成为包含如下的工序:第一中心坐标检测工序(ST1),根据拍摄单元拍摄得到的图像,求出卡盘工作台的中心的坐标(X1,Y1);第二中心坐标检测工序(ST2),根据检测单元的检测结果,求出卡盘工作台的中心的坐标(X2,Y2);坐标间距离计算工序(ST3),将中心间的距离α作为(X1-X2)来求出,将中心间的距离β作为(Y1-Y2)来求出;以及中心一致工序(ST4),在将拍摄单元的拍摄中心定位于X0、Y0的坐标时,将检测单元的检测中心定位于X0-α、YO-β的坐标而使拍摄单元的拍摄中心与检测单元的检测中心一致。摄中心与检测单元的检测中心一致。摄中心与检测单元的检测中心一致。
技术研发人员:小池彩子 田中诚 小岛芳昌
受保护的技术使用者:株式会社迪思科
技术研发日:2020.12.07
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。