1.本发明涉及交流永磁同步电机控制装置,特别涉及一种永磁同步电机电流环解耦控制方法。
背景技术:
2.永磁同步电机控制系统大多采用三环控制结构,内环为电流环,外环为速度环和位置环。为保证对位置和速度指令的快速跟踪,要求电流环具有快速准确的电流控制精度,电流环的控制精度影响整个控制装置的性能。
3.在交流永磁同步电机控制领域,传统的电流环解耦控制方案大多强调永磁同步电机的参数(如永磁同步电机的电感、电阻、磁链等)的偏差所带来的影响,主要解决如何快速、准确估计电机参数的问题,或者是降低电机参数变化对解耦的效果的影响。但是如果电机的电流、电机转速或者电机的电气角度计算不正确也会导致解耦控制效果变差,会导致电流环严重震荡,甚至使电机不能正常运行。
4.因此,需提出一种高效率的永磁同步电机电流环解耦控制方案。
技术实现要素:
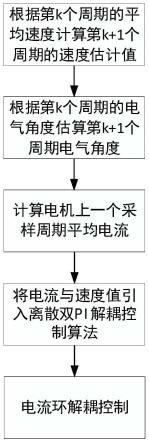
5.为解决上述不足之处,本发明提供了一种永磁同步电机电流环解耦控制方法,以提高电流环的性能,具体控制流程如图1所示。
6.本发明为实现上述目的所采用的技术方案是:一种永磁同步电机电流环解耦控制方法,包括以下步骤:
7.根据第k个svpwm的载波周期平均速度得到第k 1个svpwm的载波周期平均速度估计值;
8.根据第k个svpwm的载波周期电气角度和第k 1个svpwm的载波周期平均速度估计值,得到第k 1个svpwm的载波周期电气角度估计值;
9.采样电机电流并得到电机电流其在第k个svpwm的载波周期的平均值,根据所述平均值和第k 1个svpwm的载波周期电气角度估计值得到电机的d,q轴电流反馈值;
10.根据第k个svpwm的载波周期的d,q轴电流目标参考值和电流反馈值,分别通过pi控制器得到d,q轴电压输出;再根据第k 1个平均速度估计值通过离散双pi解耦控制算法进行电流环解耦控制。
11.所述平均速度估计值计算方式如下:
[0012][0013]
其中,ωr(k)为第k个svpwm的载波周期的电机速度平均值;为第k个svpwm的载波周期的q轴电流的目标参考值;a,b分别为ts为svpwm的载波周期;n
p
为电机的极对数;ψf为永磁体磁链;j为电机转子转动惯量;b为粘滞摩擦系数。
[0014]
所述电气角度估计值计算方式如下:
[0015]
θe(k 1)=θe(k) ωr(k 1)
×
tsꢀꢀ
(2)
[0016]
其中,θe(k)为第k个svpwm的载波周期的电气角度值;ωr(k 1)为第k 1个svpwm载波周期的平均速度估计值;ts为svpwm的载波周期。
[0017]
所述电流在一个载波周期的平均值为:
[0018][0019]
其中,ts是svpwm的载波周期;i为电机的瞬时电流多通道采样后的平均值;t为时间;k为正整数。
[0020]
所述离散双pi解耦控制的d,q轴电压方程为:
[0021][0022]
其中,和为第k个svpwm的载波周期解耦控制器的输出;ud(k)和uq(k)为第k个svpwm的载波周期的pi控制器的输出;ωr(k 1)为第k 1个svpwm的载波周期的平均速度估计值,rs、ld和lq分别为电机定子电阻、d轴电感和q轴电感;ts为svpwm的载波周期。
[0023]
本发明具有以下优点及有益效果:
[0024]
1.在电流信号采样过程中存在噪声干扰,采用多通道过采样策略能有效抑制电流采样噪声干扰提高电流采样精度,保证电流环解耦控制的效果。
[0025]
2.在电流环解耦控制过程中,由于svpwm的输出方式问题导致控制指令值与实际输出值存在一个svpwm载波周期的延时,通过转速补偿算法对电机转速进行补偿,保证电流环解耦控制效果。
[0026]
3.在电流环解耦控制过程中,由于svpwm的输出方式问题导致控制指令值与实际输出值存在一个svpwm载波周期的延时,通过电气角度补偿算法对电机电气角度进行补偿,保证电流环解耦控制效果。
附图说明
[0027]
图1为本发明的控制算法的流程图。
[0028]
图2为电流采样时序框图。
[0029]
图3为解耦控制原理图。
[0030]
图4为离散双pi解耦控制算法框图。
具体实施方式
[0031]
下面结合附图及实施例对本发明做进一步的详细说明。
[0032]
本发明提供了一种永磁同步电机电流环解耦控制方法,如图1、图3、图4所示,首先,根据第k个svpwm的载波周期的电气角度计算第k 1个svpwm的载波周期电气角度估计
值。接着,根据第k个svpwm的载波周期平均速度计算第k 1个svpwm的载波周期平均速度估计值;然后,根据提出的电流多通道过采样策略,计算d,q轴电流反馈值;最后,将计算的电流反馈值及平均速度估算值引入到离散双pi解耦控制算法中。本发明方法从三个方面对传统控制方法进行了改进。
[0033]
用svpwm控制算法对永磁同步电机进行控制时的电压方程如下:
[0034][0035]
式中,ud和uq为d,q轴电压分量;id和iq为d,q轴电流分量;ld和lq为d,q轴等效电感;ωr为转子电角速度;ψf为永磁体磁链。
[0036]
由式(1)可以看出d,q轴电压之间存在耦合关系,即d轴电压不仅跟d轴电流有关系,而且跟q轴电流也有关系;q轴电压也同样如此。其中,d,q轴的耦合项分别为-ωrl
qiq
和ωr(ldid ψf),从中可以看出耦合项跟电机转速,d轴电流,q轴电流成正比例关系。要实现正确的解耦控制必须保证电机转速和电流值的正确,否则无法正确解耦。
[0037]
由于svpwm的更新方式导致控制器的电压指令输出时会有一个svpwm载波周期的延时,在电机高速运行时这个延时会导致指令值与实际输出值之间存在偏差,最终导致电流控制出现震荡,无法进行电流的高精度控制。因此需要对电机的速度以及电气角度进行修正。
[0038]
永磁同步电机的电磁转矩方程和运动方程如下所示:
[0039][0040]
其中,n
p
为电机的极对数;ψf为永磁体磁链磁体磁链;id和iq为d,q轴电流分量;ld和lq为d,q轴等效电感;j为电机转子转动惯量;ωr为转子电角速度;b为粘滞摩擦系数;t
l
为负载转矩。
[0041]
将式(2)离散化后得到电机的速度修正方式如下:
[0042]
ωr(k 1)=aωr(k) biq(k)
ꢀꢀ
(3)
[0043]
其中,ωr(k)为第k个svpwm的载波周期的电机速度平均值;iq(k)为第k个svpwm的载波周期的q轴电流平均值;a,b分别为ts为svpwm的载波周期。
[0044]
电机的电气角度修正方式如下;
[0045]
θe(k 1)=θe(k) ωr(k 1)
×
tsꢀꢀ
(4)
[0046]
其中,θe(k)为第k个svpwm的载波周期的电气角度值;ωr(k 1)为第k 1个svpwm载波周期的平均速度估计值;ts为svpwm的载波周期。
[0047]
考虑到积分能有效抑制谐波和噪声,为解决采样电流瞬时值时容易引入噪声和谐波的问题,将平均采样引入永磁同步电机的电流采样中来。电流在一个载波周期的平均值定义为:
[0048][0049]
ts为svpwm(空间矢量脉宽调制)的载波周期,在一个周期的平均值可以近似为在周期中点采样的基波值。电流采样时序如图2,目前高性能的dsp的a/d转换器一般都具有多通道。可以实现多个通道连续采样。以tms320f28335为例,其a/d控制器一共有16个通道。将其设置为不间断自动定序模式,在快速采样模式下,tms320f28335片上a/d采样率高达6.25msps而svpwm的载波频率通常为10khz。采用这种采样方式,pwm占空比在一个周期结束时刻更新,在下个载波周期结束生效。根据采样得到的电机相电流值和电气角度估计值计算得到d,q轴电流的反馈值。
[0050]
要在数字处理器上实现新的控制算法,需要将其离散化,离散双pi解耦控制过程如图4所示,其中,和分别为d,q轴电流目标参考值,id和iq分别为d,q轴电流反馈值。离散双pi解耦控制的d,q轴电压方程为:
[0051][0052]
其中,和为第k个svpwm的载波周期解耦控制器的输出;ud(k)和uq(k)为第k个svpwm的载波周期的d,q轴pi控制器的输出;ωr(k 1)为第k 1个svpwm载波周期的平均速度估计值,rs、ld和lq分别为电机定子电阻、d轴电感和q轴电感,ts为svpwm的载波周期。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。