1.本发明涉及具备循环地移动的梯级的乘客输送机。
背景技术:
2.在专利文献1中记载有乘客输送机。该乘客输送机具备由环状的梯级链连结起来的多个梯级和对梯级的下沉进行检测的异常检测装置。异常检测装置设置于去路侧的梯级的下方。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2007-76823号公报
6.在上述乘客输送机中,梯级具有:梯级主体;以及追随辊,其旋转自如地安装于位于梯级主体的底部的辊安装部。在上述乘客输送机中,在由于追随辊的破损或脱落而产生了梯级下沉的情况下,辊安装部向下方移位。当辊安装部向下方的移位变大时,异常检测装置与辊安装部接触。由此,梯级的下沉被异常检测装置检测出。
7.然而,当辊安装部附着有异物时,存在即使未产生梯级的下沉,异常检测装置也与异物接触的情况。因此,存在有时在异常检测装置中产生误检测的课题。
技术实现要素:
8.本发明是为了解决上述那样的课题而完成的,其目的在于提供一种能够抑制异常检测装置的误检测的乘客输送机。
9.本发明的乘客输送机具备:梯级,其具有梯级主体和追随辊,并且循环地移动,所述梯级主体具有追随辊安装部,所述追随辊安装于所述追随辊安装部;追随轨道,其对所述追随辊进行引导;异常检测装置,其检测所述追随辊安装部相对于所述追随轨道的异常移位;以及清扫装置,其将附着于所述追随辊安装部的异物去除。
10.发明效果
11.根据本发明,能够抑制异常检测装置的误检测。
附图说明
12.图1是示意性地示出实施方式1的乘客输送机的结构的侧视图。
13.图2是放大示出位于图1的a部的梯级的图。
14.图3是示出实施方式1的乘客输送机的异常检测装置的结构的侧视图。
15.图4是示出沿图2的c方向观察实施方式1的乘客输送机的清扫装置及其周围时的结构的图。
16.图5是示出实施方式1的乘客输送机的清扫装置的结构的立体图。
17.图6是示出在实施方式1的乘客输送机中追随辊安装部附着有异物的状态的图。
18.图7是放大示出位于图1的b部的梯级的图。
19.图8是示出沿图7的d方向观察实施方式1的乘客输送机的清扫装置及其周围时的结构的图。
20.标号说明
21.11:桁架;12:梯级;13:梯级链;14:驱动机;15:上部反转部;15a:梯级链轮;16:控制盘;17:下部反转部;18:栏杆;19:移动扶手;20:去路;21:归路;29:梯级主体;30:踏板;30a:踏面;31:竖板;32:梯级支架;32a:侧框部;32b1:边;32b2:角部;32c:追随辊安装部;32d:被检测面;33:梯级轴;34:驱动辊;35:追随辊轴;36:追随辊;37:驱动轨道;38:追随轨道;39:移动轨迹;40:清扫装置;41:基板;41a:基部;41a1:表面;41b:安装部;42:梳状部;42a:齿;42b:切口部;43:间隙;44:刷部;44a:毛材;50、51、52、53:异常检测装置;61:轴部;62:凸轮;63:动作片;64:凹部;65:按钮;66:开关;70:异物;70a:线头;70b:头发;70c:棉絮;100:乘客输送机;121:上层;122:下层。
具体实施方式
22.实施方式1
23.对实施方式1的乘客输送机进行说明。图1是示意性地示出本实施方式的乘客输送机100的结构的侧视图。在本实施方式中,作为乘客输送机100,例示了自动扶梯。
24.如图1所示,乘客输送机100具有架设在上层121的地板与下层122的地板之间的桁架11。在桁架11设有多个梯级12。多个梯级12由配置于该多个梯级12的宽度方向两侧的一对环状的梯级链13相互连结。
25.在桁架11的上层121侧的端部设有驱动机14、由驱动机14驱动的一对梯级链轮15a、以及控制驱动机14的控制盘16。在一对梯级链轮15a上分别绕挂有一对梯级链13。多个梯级12通过经由梯级链轮15a及梯级链13传递的驱动机14的驱动力而循环地移动。
26.梯级12的循环路径包括去路20、上部反转部15、归路21以及下部反转部17。去路20是用于利用梯级12输送乘客的路径。归路21是梯级12向与去路20相反的方向移动的路径,位于去路20的下方。在上部反转部15以及下部反转部17处,梯级12的移动方向分别反转。上部反转部15设置于桁架11的上层121侧的端部。下部反转部17设置于桁架11的下层122侧的端部。在梯级12的循环路径中,上部反转部15位于去路20的一端与归路21的一端之间,下部反转部17位于去路20的另一端与归路21的另一端之间。
27.在乘客输送机100进行上升运转的情况下,梯级12在去路20、上部反转部15、归路21以及下部反转部17中依次循环。在乘客输送机100进行下降运转的情况下,梯级12在去路20、下部反转部17、归路21以及上部反转部15中依次循环。
28.在桁架11的上部,设有隔着多个梯级12而对置的一对栏杆18。在一对栏杆18各自的周缘部,设有与多个梯级12一并移动的环状的移动扶手19。
29.图2是放大示出位于图1的a部的梯级12、即位于归路21侧的下部水平部的梯级12的图。在图2中,示出了由包含上下方向以及梯级12的移动方向双方的平面切断梯级12而得到的截面。图2中的粗箭头表示梯级12的移动方向。梯级12在归路21中从下部反转部17朝向上部反转部15移动。即,乘客输送机100进行下降运转。
30.如图2所示,梯级12具有梯级主体29、分别安装于梯级主体29的一对驱动辊34以及一对追随辊36。梯级主体29具有踏板30、竖板31、梯级支架32、梯级轴33以及一对追随辊轴
35。驱动辊34、追随辊36以及追随辊轴35在梯级12的宽度方向两侧各设有一个。
31.踏板30是供乘客搭乘的矩形平板状的部件。在梯级12位于归路21时,踏板30的踏面30a朝向下方。另一方面,在梯级12位于去路20时,如后述的图7所示,踏面30a朝向上方并且水平。竖板31设置于下降运转时的踏板30的前方、即上升运转时的踏板30的后方。
32.梯级支架32支承踏板30以及竖板31。梯级支架32具有一对侧框部32a,该一对侧框部32a在梯级12的宽度方向两侧各配置有一个。一对侧框部32a分别形成为三角形状的框状。侧框部32a的一个边32b1沿着踏板30配置。侧框部32a具有安装追随辊36的追随辊安装部32c。追随辊安装部32c从侧框部32a的与边32b1对置的角部32b2朝向侧框部32a的外侧突出地设置。
33.追随辊安装部32c是在梯级主体29中距踏板30最远的部分。在梯级12位于归路21时,即,踏板30的踏面30a朝向下方时,追随辊安装部32c在梯级主体29中位于最上方。即,在梯级12位于归路21时,追随辊安装部32c成为梯级主体29的顶部。在梯级12位于去路20时,即,踏板30的踏面30a朝向上方时,追随辊安装部32c在梯级主体29中位于最下方。即,在梯级12位于去路20时,追随辊安装部32c成为梯级主体29的底部。
34.追随辊安装部32c具有作为后述的异常检测装置50或异常检测装置51的检测对象的被检测面32d。在梯级12位于归路21时,被检测面32d朝向上方。在梯级12位于去路20时,被检测面32d朝向下方。
35.梯级轴33设置于下降运转时的梯级支架32的后部。梯级轴33沿着梯级12的宽度方向延伸,并贯穿一对侧框部32a。梯级轴33的两端部分别与一对梯级链13连结。在各个梯级链13,以固定的间距连结有多个梯级12的梯级轴33。
36.驱动辊34安装于梯级轴33的两端部。即,驱动辊34经由梯级轴33而安装于下降运转时的梯级支架32的后部、即上升运转时的梯级支架32的前部。
37.追随辊轴35安装于追随辊安装部32c,并沿着梯级12的宽度方向延伸。追随辊36安装于追随辊轴35。即,追随辊36经由追随辊轴35安装于追随辊安装部32c。追随辊36在下降运转时位于比驱动辊34靠前方的位置,在上升运转时位于比驱动辊34靠后方的位置。
38.在桁架11固定有驱动轨道37及追随辊36。在由一对梯级链13牵引梯级12时,驱动辊34由驱动轨道37引导,追随辊36由追随轨道38引导。
39.返回图1,乘客输送机100还具有异常检测装置50以及异常检测装置51。异常检测装置50以及异常检测装置51是乘客输送机100所具备的安全装置的一种。
40.异常检测装置50以及异常检测装置51均设置于去路20中的梯级12的下方。异常检测装置50以及异常检测装置51分别构成为检测追随辊安装部32c相对于追随轨道38向下方向的异常移位、即去路20中的梯级12的下沉。异常检测装置50在上层121的乘降口附近的倾斜部处隔着梯级12在左右两侧各设有一个。异常检测装置51在下层122的乘降口附近的倾斜部处隔着梯级12在左右两侧各设有一个。
41.图3是示出本实施方式的乘客输送机100的异常检测装置50的结构的侧视图。以下,对两个异常检测装置50中的一个异常检测装置50的结构进行说明,但是,两个异常检测装置50中的另一个异常检测装置50以及两个异常检测装置51也具有相同的结构。
42.如图3所示,异常检测装置50作为检测异常的机构,具有轴部61、凸轮62以及动作片63。轴部61沿着梯级12的宽度方向延伸,由未图示的轴承支承为旋转自如。凸轮62具有与
轴部61同轴的圆板状的形状,并固定于轴部61。在凸轮62的外周面的一部分形成有沿轴向延伸的槽状的凹部64。动作片63固定于轴部61,并且从轴部61朝向上方突出。
43.此外,异常检测装置50具有具备按钮65的开关66。按钮65以未被按下的状态插入于凸轮62的凹部64内。
44.当在未产生梯级12的下沉的情况下沿着梯级12的移动方向观察时,追随辊安装部32c与动作片63之间是分离的。因此,在未产生梯级12的下沉的情况下,动作片63与追随辊安装部32c不接触。在此,未产生梯级12的下沉的状态不仅包括完全未产生追随辊安装部32c向下方的移位的状态,还包括追随辊安装部32c相对于追随轨道38向下方的移位处于适当范围的状态。
45.在追随辊36发生了破损或脱落的情况下,会产生梯级12的下沉,追随辊安装部32c向下方移位。当追随辊安装部32c相对于追随轨道38向下方的移位超过适当范围地增大时,在梯级12通过异常检测装置50时,动作片63与追随辊安装部32c的被检测面32d接触。与追随辊安装部32c接触的动作片63被追随辊安装部32c向梯级12的移动方向按压,从而与轴部61及凸轮62一并旋转。当凸轮62旋转时,按钮65被凸轮62按压,开关66动作。由此,在异常检测装置50中,检测到追随辊安装部32c向下方的异常移位、即梯级12的下沉。当检测到梯级12的下沉时,从异常检测装置50向控制盘16输出异常检测信号,通过控制盘16的控制而使乘客输送机100的运转停止。
46.返回图1,乘客输送机100还具有异常检测装置52以及异常检测装置53。异常检测装置52以及异常检测装置53是乘客输送机100所具备的安全装置的一种。
47.异常检测装置52以及异常检测装置53均设置于归路21中的梯级12的上方。异常检测装置52以及异常检测装置53分别构成为检测追随辊安装部32c相对于追随轨道38向上方向的异常移位、即归路21中的梯级12的浮起。异常检测装置52在上层121附近的倾斜部处隔着梯级12在左右两侧各设有一个。异常检测装置53在下层122附近的倾斜部处隔着梯级12在左右两侧各设有一个。两个异常检测装置52以及两个异常检测装置53均具有使图3所示的异常检测装置50上下颠倒后的结构。
48.虽然省略了图示,在未产生梯级12的浮起的情况下,两个异常检测装置52以及两个异常检测装置53各自的动作片与追随辊安装部32c不接触。在此,未产生梯级12的浮起的状态不仅包括完全未产生追随辊安装部32c向上方的移位的状态,还包括追随辊安装部32c相对于追随轨道38向上方的移位处于适当范围的情况。
49.当产生梯级12的浮起时,追随辊安装部32c向上方移位。当追随辊安装部32c向上方的移位超过适当范围地增大时,上述动作片与追随辊安装部32c接触。由此,在异常检测装置52以及异常检测装置53中,分别检测到追随辊安装部32c向上方的异常移位、即梯级12的浮起。从检测到梯级12的浮起的异常检测装置向控制盘16输出异常检测信号。
50.本实施方式的各异常检测装置50、51、52、53为具备与追随辊安装部32c接触的动作片63的接触式异常检测装置。然而,各异常检测装置50、51、52、53也可以为具备在不与追随辊安装部32c接触的情况下对追随辊安装部32c的上下方向上的异常移位进行检测的接近传感器的非接触式异常检测装置。
51.返回图2,乘客输送机100还具有清扫装置40。清扫装置40设置于归路21中的梯级12的上方的、沿着追随辊安装部32c的移动轨迹39的位置处。清扫装置40构成为去除附着于
追随辊安装部32c的垃圾等异物。在本实施方式中,清扫装置40构成为去除附着于追随辊安装部32c的被检测面32d的垃圾等异物。清扫装置40以与被检测面32d对置的方式固定于桁架11。
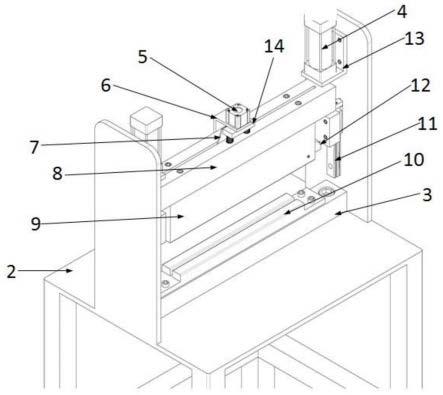
52.图4是示出沿图2的c方向观察本实施方式的乘客输送机100的清扫装置40及其周围时的结构的图。在此,图2的c方向是沿着梯级12的移动方向的方向。图5是示出本实施方式的乘客输送机100的清扫装置40的结构的立体图。
53.如图4及图5所示,清扫装置40具有形成为截面l字状的金属制的基板41。基板41具有:平板状的基部41a;安装部41b,其设置于基部41a的一端侧,并且相对于基部41a弯折;以及梳状部42,其设置于基部41a的另一端侧。梳状部42形成为像叉子那样末端分为多个的梳状。梳状部42具有多个齿42a和形成于彼此相邻的两个齿42a之间的至少一个切口部42b。多个齿42a在与基部41a相同的平面内从基部41a向一个方向突出。在图4的左右方向上,梳状部42的宽度比追随辊安装部32c的宽度宽。
54.安装部41b安装于桁架11。基部41a以及梳状部42沿着追随辊安装部32c的移动轨迹39设置。基部41a以及梳状部42配置于从移动轨迹39离开距离l1的位置。即,在沿着梯级12的移动方向观察时,基部41a以及梳状部42配置于从追随辊安装部32c离开距离l1的位置。距离l1例如为5mm左右。在梳状部42与移动轨迹39之间形成有间隙43。梳状部42被设置为多个齿42a的突出方向与梯级12的移动方向平行且相反。
55.此外,清扫装置40具有与追随辊安装部32c接触的刷部44。刷部44设置于基部41a的梯级支架32侧的表面41a1。在图4的左右方向上,刷部44的宽度比追随辊安装部32c的宽度宽。刷部44具有植于基部41a的表面41a1的树脂制的多个毛材44a。各个毛材44a从基部41a的表面41a1垂直地以到达追随辊安装部32c的移动轨迹39、或者超过移动轨迹39的方式延伸。即,毛材44a各自的长度l2为距离l1以上。由此,多个毛材44a中的至少一部分毛材44a与追随辊安装部32c的被检测面32d接触。
56.刷部44在梯级12的移动方向上配置于比梳状部42靠前方的位置。即,刷部44在清扫装置40相对于梯级12的相对移动方向上配置于比梳状部42靠后方的位置。由此,追随辊安装部32c在通过梳状部42之后通过刷部44。
57.图6是示出在本实施方式的乘客输送机100中追随辊安装部32c附着有异物70的状态的图。在图6所示的状态下,在追随辊安装部32c及其周围的追随辊轴35上缠绕有由线头70a、头发70b、棉絮70c等一体形成的异物70。
58.当追随辊安装部32c伴随着梯级12的移动而接近清扫装置40时,附着于追随辊安装部32c的异物70首先与梳状部42接触。当追随辊安装部32c进一步接近清扫装置40时,梳状部42的齿42a扎入异物70。齿42a所扎入的异物70伴随着梯级12的移动而被齿42a扯掉、除去。由此,异物70的大部分被从追随辊安装部32c去除。
59.之后,追随辊安装部32c与刷部44接触。残留于追随辊安装部32c的异物70的残骸伴随着梯级12的移动而被刷部44的多个毛材44a擦掉。由此,异物70被从追随辊安装部32c去除。
60.假设追随辊安装部32c附着有异物70的梯级12通过了图3所示的异常检测装置50,则存在动作片63与异物70接触而产生异常检测装置50的误检测的情况。在此,异常检测装置50的误检测是指,尽管未产生梯级12的上下方向上的异常移位,也检测出梯级12的上下
方向上的异常移位的情况。对此,在本实施方式中,由于能够利用清扫装置40去除附着于追随辊安装部32c的异物70,因此能够抑制异常检测装置50的误检测。
61.清扫装置40的设置位置不限于图1的a部,只要是沿着梯级12的循环路径的位置,可以是任意位置。图7是放大示出位于图1的b部的梯级12、即位于去路20侧的下部水平部的梯级12的图。图8是示出沿图7的d方向观察本实施方式的乘客输送机及其周围时的结构的图。在此,图7的d方向是沿着梯级12的移动方向的方向。在图7和图8所示的例子中,清扫装置40设置在沿着去路20侧的下部水平部的位置。梯级12在去路20中从下部反转部17朝向上部反转部15移动。即,在图7和图8所示的例子中,乘客输送机100进行上升运转。
62.如图7和图8所示,在梯级12位于去路20时,即,在踏板30的踏面30a朝向上方时,追随辊安装部32c在梯级主体29中位于最下方。清扫装置40设置在去路20中的梯级12的下方的、沿着追随辊安装部32c的移动轨迹39的位置。清扫装置40的结构为将图2和图4所示的清扫装置40的结构上下颠倒而得到的结构,清扫装置40与追随辊安装部32c的位置关系为将图2和图4所示的清扫装置40与追随辊安装部32c的位置关系上下颠倒而得到的位置关系。根据图7和图8所示的结构,也能够获得与图2和图4所示的结构相同的效果。
63.设置清扫装置40的位置可以是沿着去路20侧的上部水平部或倾斜部的位置,也可以是沿着归路21侧的上部水平部或倾斜部的位置。此外,设置清扫装置40的位置也可以是沿着上部反转部15或下部反转部17的位置。即使清扫装置40设置于这些部分,也能够获得相同的效果。
64.清扫装置40可以相对于梯级12的移动方向仅设置于左侧或者仅设置于右侧,也可以设置于左右两侧。在检测追随辊安装部32c的上下方向上的异常移位的异常检测装置设置于梯级12的左右两侧的情况下,优选清扫装置40也设置于左右两侧。
65.在图2或图7所示的结构中,在梯级12的移动方向相反的情况下,只要使清扫装置40的方向相反即可。即使在该情况下,也能够获得相同的效果。
66.此外,清扫装置40也可以仅具有梳状部42以及刷部44中的任意一方。即使在该情况下,也能够利用梳状部42或刷部44去除附着于追随辊安装部32c的异物70,因此,能够抑制异常检测装置50、51、52、53各自的误检测。
67.在本实施方式中,作为乘客输送机100,例举了自动扶梯,但本实施方式也能够应用于移动人行道等其它乘客输送机。
68.如以上进行了说明的那样,本实施方式的乘客输送机100具备梯级12、追随轨道38、异常检测装置50、51、52、53以及清扫装置40。梯级12构成为具有梯级主体29和追随辊36,并且循环地移动,所述梯级主体29具有追随辊安装部32c,所述追随辊36安装于追随辊安装部32c。追随轨道38构成为对追随辊36进行引导。异常检测装置50、51、52、53分别构成为检测追随辊安装部32c相对于追随轨道38的上下方向上的异常移位。清扫装置40构成为将附着于追随辊安装部32c的异物70去除。
69.当追随辊安装部32c附着有异物70时,存在异常检测装置50、51、52、53各自产生误检测的情况。对此,根据上述结构,能够利用清扫装置40去除附着于追随辊安装部32c的异物70,因此能够抑制异常检测装置50、51、52、53各自的误检测。
70.在本实施方式的乘客输送机100中,清扫装置40具有梳状部42,该梳状部42具有向一个方向分别突出的多个齿42a。梳状部42沿着追随辊安装部32c的移动轨迹39设置。多个
齿42a的突出方向与梯级12的移动方向相反。根据该结构,能够利用梯级12的移动,通过多个齿42a将附着于追随辊安装部32c的异物70扯掉、除去。因此,能够更可靠地去除异物70。因此,能够更可靠地抑制异常检测装置50、51、52、53各自的误检测。
71.在本实施方式的乘客输送机100中,清扫装置40具有与追随辊安装部32c接触的刷部44。根据该结构,能够利用梯级12的移动,通过刷部44擦掉附着于追随辊安装部32c的异物70,因此能够更可靠地去除异物70。因此,能够更可靠地抑制异常检测装置50、51、52、53各自的误检测。
72.在本实施方式的乘客输送机100中,清扫装置40具有上述梳状部42和上述刷部44。刷部44在梯级12的移动方向上配置于比梳状部42靠前方的位置。根据该结构,在附着于追随辊安装部32c的异物70的大部分被多个齿42a扯掉、除去之后,异物70的残骸被刷部44擦掉,因此能够更可靠地去除异物70。因此,能够更可靠地抑制异常检测装置50、51、52、53各自的误检测。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。