技术特征:
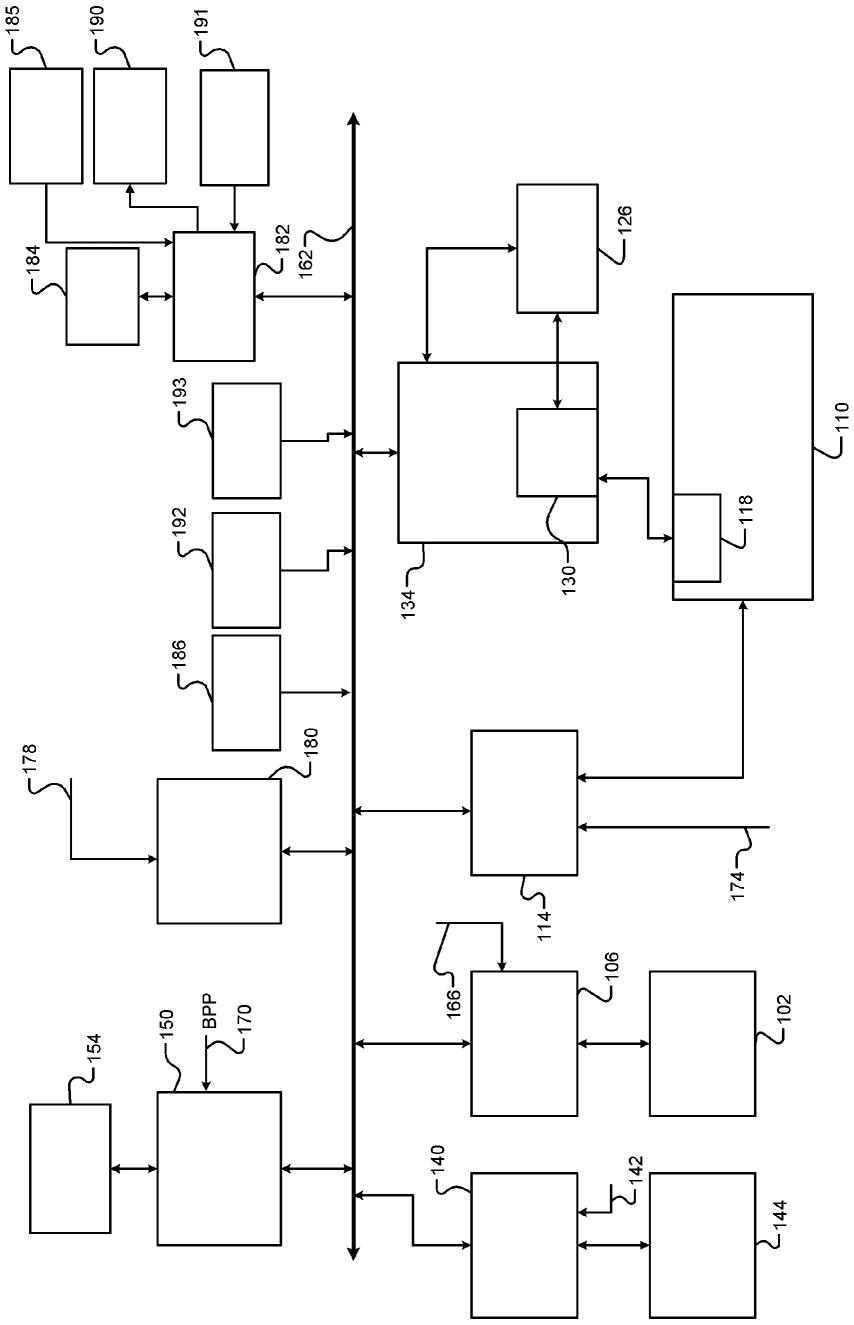
1.一种交叉口导航系统,包括:复杂度模块,其被配置成确定两条或更多条道路的交叉口的复杂度值,其中,所述交叉口的复杂度值对应于用于车辆在自主驾驶期间导航所述交叉口的复杂度水平;以及驾驶控制模块,其被配置成:在车辆的自主驾驶期间,控制以下各项中的至少一项:所述车辆的转向;所述车辆的制动;和所述车辆的加速度;和基于所述交叉口的复杂度值,选择性地调节自主驾驶的至少一个方面。2.根据权利要求1所述的交叉口导航系统,其中,所述驾驶控制模块被配置成基于所述交叉口的复杂度值,选择性地调节所述车辆的路线。3.根据权利要求2所述的交叉口导航系统,其中,所述驾驶控制模块被配置成:当所述交叉口的复杂度值大于预定值时,从所述路线移除所述交叉口。4.根据权利要求1所述的交叉口导航系统,其中,所述驾驶控制模块被配置成:基于所述交叉口的复杂度值,选择性地禁用所述自主驾驶并触发车辆驾驶员的手动驾驶。5.根据权利要求4所述的交叉口导航系统,其中,所述驾驶控制模块被配置成:当所述交叉口的复杂度值大于预定值时,选择性地禁用所述自主驾驶并触发由所述车辆的驾驶员的手动驾驶。6.根据权利要求1所述的交叉口导航系统,其中,所述驾驶控制模块被配置成:基于所述交叉口的复杂度值,选择性地禁用所述自主驾驶,并触发远离所述车辆的驾驶员对所述车辆的驾驶。7.根据权利要求6所述的交叉口导航系统,其中,所述驾驶控制模块被配置成:当所述交叉口的复杂度值大于预定值时,选择性地禁用自主驾驶,并触发远离所述车辆的驾驶员对所述车辆的驾驶。8.根据权利要求1所述的交叉口导航系统,其中,所述驾驶控制模块被配置成:基于所述交叉口的复杂度值,调节传感器融合的至少一个方面。9.根据权利要求8所述的交叉口导航系统,其中,所述驾驶控制模块被配置成:当所述交叉口的复杂度值大于预定值时,调节所述传感器融合的至少一个方面。10.根据权利要求1所述的交叉口导航系统,其中,所述复杂度模块被配置成基于车辆的感测能力来确定交叉口的复杂度值。
技术总结
本发明涉及一种交叉口导航系统。交叉口导航系统,包括:复杂度模块,其被配置成确定两条或更多条道路的交叉口的复杂度值,其中交叉口的复杂度值对应于用于车辆在自主驾驶期间导航交叉口的复杂度水平;以及驾驶控制模块,其被配置成:在车辆的自主驾驶期间,控制以下各项中的至少一项:车辆的转向;车辆的制动;和车辆的加速度;并且基于交叉口的复杂度值,选择性地调节自主驾驶的至少一个方面。性地调节自主驾驶的至少一个方面。性地调节自主驾驶的至少一个方面。
技术研发人员:K
受保护的技术使用者:通用汽车环球科技运作有限责任公司
技术研发日:2021.05.14
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。