技术特征:
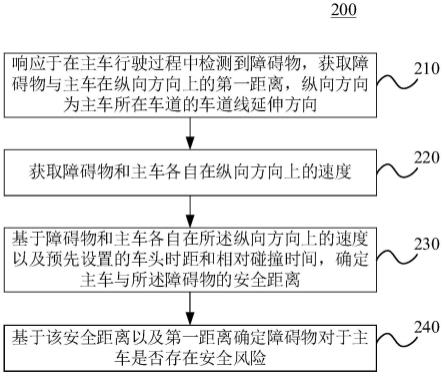
1.一种车辆驾驶风险评估方法,包括:响应于在主车行驶过程中检测到障碍物,获取所述障碍物与所述主车在纵向方向上的第一距离,其中所述纵向方向为所述主车所在车道的车道线延伸方向;获取所述障碍物和所述主车各自在所述纵向方向上的速度;基于所述障碍物和所述主车各自在所述纵向方向上的速度、以及预先设置的车头时距和相对碰撞时间,确定所述主车与所述障碍物的安全距离,其中所述相对碰撞时间表示所述主车与所述障碍物存在速度差时的预设安全时间,所述车头时距表示所述主车与所述障碍物的前端通过同一地点的预设时间差;以及基于所述安全距离以及所述第一距离确定所述障碍物对于所述主车是否存在安全风险。2.如权利要求1所述的方法,其中,所述障碍物为所述主车行驶方向前方的障碍物,所述安全距离包括第一距离分量,所述第一距离分量基于以下公式确定:s
safe1
=max{[t
tc
*(v-v
s
) t
h
*v
s
],0}其中,v为所述主车在所述纵向方向上的速度,v
s
为所述障碍物在所述纵向方向上的速度,t
h
为所述预先设置的车头时距,t
tc
为所述预先设置的相对碰撞时间。3.如权利要求2所述的方法,其中,所述安全距离进一步包括基于预设的最小纵向安全距离所确定的第二距离分量。4.如权利要求2或3所述的方法,其中,基于包含所述主车的中心点位置以及包含所述障碍物的检测框的中心点位置确定所述第一距离,并且,所述安全距离进一步包括第三距离分量,所述第三距离分量基于所述主车和所述障碍物各自在所述纵向方向上的尺寸确定。5.如权利要求1所述的方法,还包括:响应于确定所述第一距离小于所述安全距离,确定所述障碍物是否位于所述主车所在车道的相邻车道;响应于确定所述障碍物位于所述主车所在车道的相邻车道,获取所述障碍物在横向方向上的速度,其中所述横向方向垂直于所述主车所在车道的车道线延伸方向;以及响应于确定所述障碍物在横向方向上的速度方向指向所述主车所在方向,基于所述障碍物在所述横向方向上的速度确定所述障碍物对于所述主车是否存在安全风险。6.如权利要求5所述的方法,其中,基于所述障碍物在所述横向方向上的速度确定所述障碍物对于所述主车是否存在安全风险包括:获取所述障碍物与所述主车在所述横向方向上的第二距离以及所述主车在所述横向方向上的速度;基于所述障碍物和所述主车各自在所述横向方向上的速度、以及所述第二距离,确定所述主车与所述障碍物即将发生碰撞的碰撞预测时间;以及基于所述碰撞预测时间确定所述障碍物对于所述主车是否存在安全风险。7.如权利要求6所述的方法,其中,所述碰撞预测时间进一步基于预设的最小横向安全距离确定。8.如权利要求6或7所述的方法,其中,基于包含所述主车的中心点位置以及包含所述障碍物的检测框的中心点位置确定所述第二距离,并且,所述碰撞预测时间进一步基于所
述主车和所述障碍物各自在所述横向方向上的尺寸确定。9.如权利要求5所述的方法,其中,确定所述障碍物是否位于所述主车所在车道的相邻车道包括:获取包括所述障碍物以及所述主车所在车道的车道线的视觉信息,以基于所述视觉信息确定所述障碍物是否与位于所述主车所在车道的相邻车道。10.如权利要求5所述的方法,其中,确定所述障碍物是否位于所述主车所在车道的相邻车道包括:获取所述障碍物相对于所述主车的位置信息,以基于所述位置信息确定所述障碍物是否与位于所述主车所在车道的相邻车道。11.如权利要求10所述的方法,其中,所述位置信息包括所述障碍物与所述主车之间的第三距离、以及所述障碍物与所述主车之间连线相对于所述车道线的延伸方向的第一角度,其中,基于所述位置信息确定所述障碍物是否与位于所述主车所在车道的相邻车道包括:基于所述障碍物与所述主车的第三距离、以及所述第一角度,确定所述障碍物与所述主车在所述横向方向上的距离;以及基于所确定的所述横向方向上的距离确定所述障碍物是否与位于所述主车所在车道的相邻车道。12.如权利要求10或11所述的方法,其中,基于所述主车上的传感器获取所述位置信息,所述传感器包括以下项中的至少一项:摄像头、激光雷达、毫米波雷达。13.如权利要求10或11所述的方法,其中,基于路测设备获取所述位置信息,所述路测设备包括以下项中的至少一项:摄像头、激光雷达、毫米波雷达。14.如权利要求1-7或9-11中任一项所述的方法,其中,所述障碍物包括车辆。15.一种车辆驾驶风险评估装置,包括:第一获取单元,配置为响应于在主车行驶过程中检测到障碍物,获取所述障碍物与所述主车在纵向方向上的第一距离,其中所述纵向方向为所述主车所在车道的车道线延伸方向;第二获取单元,配置为获取所述障碍物和所述主车各自在所述纵向方向上的速度;以及第一确定单元,配置为基于所述障碍物和所述主车各自在所述纵向方向上的速度、以及预先设置的车头时距和相对碰撞时间,确定所述主车与所述障碍物的安全距离,其中所述相对碰撞时间表示所述主车与所述障碍物存在速度差时的预设安全时间,所述车头时距表示所述主车与所述障碍物的前端通过同一地点的预设时间差;以及第二确定单元,配置为基于所述安全距离以及所述第一距离确定所述障碍物对于所述主车是否存在安全风险。16.如权利要求15所述的装置,其中,所述障碍物为所述主车行驶方向前方的障碍物,所述安全距离包括第一距离分量,所述第一距离分量基于以下公式确定:s
safe1
=max{[t
tc
*(v-v
s
) t
h
*v
s
],0}其中,v为所述主车在所述纵向方向上的速度,v
s
为所述障碍物在所述纵向方向上的速度,t
h
为所述预先设置的车头时距,t
tc
为所述预先设置的相对碰撞时间。17.如权利要求15所述的装置,其中,所述安全距离进一步包括基于预设的最小纵向安全距离所确定的第二距离分量。
18.如权利要求15所述的装置,还包括:第三确定单元,配置为响应于确定所述第一距离小于所述安全距离,确定所述障碍物是否位于所述主车所在车道的相邻车道;第三获取单元,配置为响应于确定所述障碍物位于所述主车所在车道的相邻车道,获取所述障碍物在横向方向上的速度,其中所述横向方向垂直于所述主车所在车道的车道线延伸方向;以及第四确定单元,配置为响应于确定所述障碍物在横向方向上的速度方向指向所述主车所在方向,基于所述障碍物在所述横向方向上的速度确定所述障碍物对于所述主车是否存在安全风险。19.如权利要求18所述的装置,其中,所述第四确定单元包括:第四获取单元,配置为获取所述障碍物与所述主车在所述横向方向上的第二距离以及所述主车在所述横向方向上的速度;第五确定单元,配置为基于所述障碍物和所述主车各自在所述横向方向上的速度、以及所述第二距离,确定所述主车与所述障碍物即将发生碰撞的碰撞预测时间;以及第六确定单元,配置为基于所述碰撞预测时间确定所述障碍物对于所述主车是否存在安全风险。20.一种电子设备,包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行权利要求1-14中任一项所述的方法。21.一种存储有计算机指令的非瞬时计算机可读存储介质,其中,所述计算机指令用于使所述计算机执行根据权利要求1-14中任一项所述的方法。22.一种计算机程序产品,包括计算机程序,其中,所述计算机程序在被处理器执行时实现权利要求1-14中任一项所述的方法。23.一种车辆,包括根据权利要求20所述的电子设备。24.一种边缘计算设备,包括根据权利要求20所述的电子设备。
技术总结
本公开提供了一种车辆驾驶风险评估方法、装置、电子设备及边缘计算设备,涉及计算机领域,尤其涉及自动驾驶、智能交通领域。实现方案为:响应于在主车行驶过程中检测到障碍物,获取障碍物与主车在纵向方向上的第一距离,纵向方向为主车所在车道的车道线延伸方向;获取障碍物和主车各自在纵向方向上的速度;基于障碍物和主车各自在纵向方向上的速度、以及预先设置的车头时距和相对碰撞时间,确定主车与障碍物的安全距离;以及基于安全距离以及第一距离确定障碍物对于主车是否存在安全风险。相对碰撞时间表示主车与障碍物存在速度差时的预设安全时间,车头时距表示主车与障碍物的前端通过同一地点的预设时间差。过同一地点的预设时间差。过同一地点的预设时间差。
技术研发人员:陈鹏旭
受保护的技术使用者:北京百度网讯科技有限公司
技术研发日:2022.03.31
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。