技术特征:
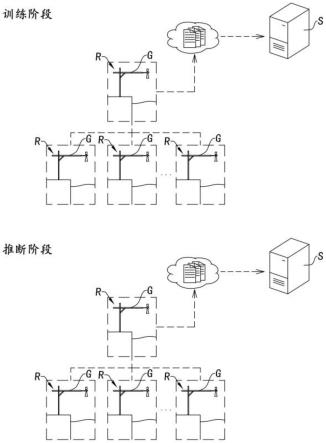
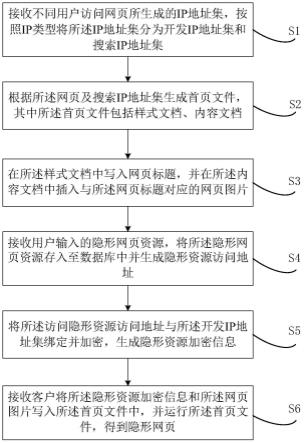
1.一种基于水位联动的水位预测方法,其特征在于,包括:训练阶段,包括:获取各个水位站在各个时间点的水位数据;将各个所述水位站在各个时间点的水位数据通过包含嵌入层的基于上下文的编码器模型以获得对应于各个所述水位站的特征向量的序列,并将各个所述水位站的特征向量的序列中各个特征向量进行级联以获得各个所述水位站的水位特征向量;获取所述多个水位站的拓扑矩阵,所述拓扑矩阵中非对角线位置上各个位置的特征值表示对应两个水位站之间的距离,所述拓扑矩阵中对角线位置上的各个位置的特征值为0;将所述拓扑矩阵通过第一卷积神经网络以获得拓扑特征矩阵;将各个所述水位站的水位特征向量进行二维拼接以获得各个所述水位站的水位特征矩阵;融合所述拓扑特征矩阵和所述水位特征矩阵以获得映射特征矩阵;将所述映射特征矩阵通过第二卷积神经网络以获得融合特征矩阵;从各个所述水位站的水位特征向量中获取待预测的水位站的水位特征向量;将所述待预测的水位站的水位特征向量作为查询向量分别与所述映射特征矩阵和所述融合特征矩阵进行矩阵相乘以获得第一特征向量和第二特征向量;计算所述第一特征向量和所述第二特征向量之间的序列进化的约束因数,其中,所述序列进化的约束因数包含两项,第一项为所述第一特征向量与第二特征向量之间的交叉熵数值,第二项为所述第一特征向量和所述第二特征向量分别通过分类器获得的第一类别概率值与第二类别概率值之商的对数函数值;将所述第二特征向量通过分类器以获得分类损失函数值;以及以所述分类损失函数值和所述序列进化的约束因数之间的加权和作为损失函数值来训练所述第二卷积神经网络;以及推断阶段,包括:获取各个水位站在各个时间点的水位数据;将各个所述水位站在各个时间点的水位数据通过包含嵌入层的基于上下文的编码器模型以获得对应于各个所述水位站的特征向量的序列,并将各个所述水位站的特征向量的序列中各个特征向量进行级联以获得各个所述水位站的水位特征向量;获取所述多个水位站的拓扑矩阵,所述拓扑矩阵的除对角线位置以外的各个位置的特征值表示对应两个水位站之间的距离,所述拓扑矩阵的对角线位置上的各个位置的特征值为0;将所述拓扑矩阵通过第一卷积神经网络以获得拓扑特征矩阵;将各个所述水位站的水位特征向量进行二维拼接以获得水位特征矩阵;融合所述拓扑特征矩阵和所述水位特征矩阵以获得映射特征矩阵;将所述映射特征矩阵通过经训练阶段训练完成的所述第二卷积神经网络以获得融合特征矩阵;获取待预测的水位站的水位特征向量;将所述待预测的水位站的水位特征向量作为查询向量与所述融合特征矩阵进行矩阵相乘以获得分类特征向量;以及
将所述分类特征向量通过分类器以获得分类结果,所述分类结果用于表示带预测的水位站的水位变化情况。2.根据权利要求1所述的基于水位联动的水位预测方法,其中,将各个所述水位站在各个时间点的水位数据通过包含嵌入层的基于上下文的编码器模型以获得对应于各个所述水位站的特征向量的序列,并将各个所述水位站的特征向量的序列中各个特征向量进行级联以获得各个所述水位站的水位特征向量,包括:使用所述编码器模型的嵌入层将各个所述水位站在各个时间点的水位数据分别映射为嵌入向量以获得对应于每个所述水位站的嵌入向量的序列;将各个所述水位站的嵌入向量的序列输入所述转换器模型的转换器以获得对应于各个所述水位站的特征向量的序列;以及将各个所述水位站的特征向量的序列中各个特征向量进行级联以获得各个所述水位站的水位特征向量。3.根据权利要求2所述的基于水位联动的水位预测方法,其中,将所述拓扑矩阵通过第一卷积神经网络以获得拓扑特征矩阵,包括:在所述第一卷积神经网络的各层的层正向传递过程中对来自上一层的输入数据进行卷积处理,沿通道维度的均值池化处理和激活处理以获得所述拓扑特征矩阵,其中,所述第一卷积神经网络的第一层的输入数据为所述拓扑矩阵。4.根据权利要求3所述的基于水位联动的水位预测方法,其中,将所述映射特征矩阵通过第二卷积神经网络以获得融合特征矩阵,包括:所述第二卷积神经网络中除最后一层以外的各层在层的正向传递中对输入数据进行卷积处理、池化处理和激活处理以由所述第二卷积神经网络的最后第二层输出特征图,其中,所述第二卷积神经网络的第一层的输入数据为所述映射特征矩阵;所述第二卷积神经网络的最后一层对所述特征图进行卷积处理、沿通道维度的全局均值池化处理和激活处理以获得所述融合特征矩阵。5.根据权利要求4所述的基于水位联动的水位预测方法,其中,计算所述第一特征向量和所述第二特征向量之间的序列进化的约束因数,包括:以如下公式来计算所述第一特征向量和所述第二特征向量之间的序列进化的约束因数;其中,所述公式为:6.根据权利要求5所述的基于水位联动的水位预测方法,其中,将所述第二特征向量通过分类器以获得分类损失函数值,包括:所述分类器以如下公式对所述第二特征向量进行处理以获得分类结果,其中,所述公式为:softmax{(w
n
,b
n
):
…
:(w1,b1)|x},其中,w1到w
n
为权重矩阵,b1到b
n
为偏置向量,x为第二特征向量;以及计算所述分类结果和真实值之间的交叉熵值作为所述分类损失函数值。7.一种基于水位联动的水位预测系统,其特征在于,包括:训练模块,包括:
水位数据获取单元,用于获取各个水位站在各个时间点的水位数据;编码单元,用于将各个所述水位数据获取单元获得的所述水位站在各个时间点的水位数据通过包含嵌入层的基于上下文的编码器模型以获得对应于各个所述水位站的特征向量的序列,并将各个所述水位站的特征向量的序列中各个特征向量进行级联以获得各个所述水位站的水位特征向量;拓扑矩阵获取单元,用于获取所述多个水位站的拓扑矩阵,所述拓扑矩阵中非对角线位置上各个位置的特征值表示对应两个水位站之间的距离,所述拓扑矩阵中对角线位置上的各个位置的特征值为0;第一卷积单元,用于将所述拓扑矩阵获取单元获得的所述拓扑矩阵通过第一卷积神经网络以获得拓扑特征矩阵;二维拼接单元,用于将各个所述编码单元获得的所述水位站的水位特征向量进行二维拼接以获得各个所述水位站的水位特征矩阵;融合单元,用于融合所述第一卷积单元获得的所述拓扑特征矩阵和所述二维拼接单元获得的所述水位特征矩阵以获得映射特征矩阵;第二卷积单元,用于将所述融合单元获得的所述映射特征矩阵通过第二卷积神经网络以获得融合特征矩阵;待预测水位特征向量生成单元,用于从各个所述编码单元获得的所述水位站的水位特征向量中获取待预测的水位站的水位特征向量;矩阵相乘单元,用于将所述待预测水位特征向量生成单元获得的所述待预测的水位站的水位特征向量作为查询向量分别与所述融合单元获得的所述映射特征矩阵和所述第二卷积单元获得的所述融合特征矩阵进行矩阵相乘以获得第一特征向量和第二特征向量;约束因数计算单元,用于计算所述矩阵相乘单元获得的所述第一特征向量和所述矩阵相乘单元获得的所述第二特征向量之间的序列进化的约束因数,其中,所述序列进化的约束因数包含两项,第一项为所述第一特征向量与第二特征向量之间的交叉熵数值,第二项为所述第一特征向量和所述第二特征向量分别通过分类器获得的第一类别概率值与第二类别概率值之商的对数函数值;分类损失函数计算单元,用于将所述矩阵相乘单元获得的所述第二特征向量通过分类器以获得分类损失函数值;以及训练单元,用于以所述分类损失函数计算单元获得的所述分类损失函数值和所述约束因数计算单元获得的所述序列进化的约束因数之间的加权和作为损失函数值来训练所述第二卷积神经网络;以及推断模块,包括:推断数据获取单元,用于获取各个水位站在各个时间点的水位数据;特征向量生成单元,用于将各个所述推断数据获取单元获得的所述水位站在各个时间点的水位数据通过包含嵌入层的基于上下文的编码器模型以获得对应于各个所述水位站的特征向量的序列,并将各个所述水位站的特征向量的序列中各个特征向量进行级联以获得各个所述水位站的水位特征向量;水位站拓扑获取单元,用于获取所述多个水位站的拓扑矩阵,所述拓扑矩阵的除对角线位置以外的各个位置的特征值表示对应两个水位站之间的距离,所述拓扑矩阵的对角线
位置上的各个位置的特征值为0;拓扑特征矩阵生成单元,用于将所述水位站拓扑获取单元获得的所述拓扑矩阵通过第一卷积神经网络以获得拓扑特征矩阵;水位特征矩阵生成单元,用于将各个所述特征向量生成单元获得的所述水位站的水位特征向量进行二维拼接以获得水位特征矩阵;映射特征矩阵生成单元,用于融合所述拓扑特征矩阵生成单元获得的所述拓扑特征矩阵和所述水位特征矩阵生成单元获得的所述水位特征矩阵以获得映射特征矩阵;融合特征矩阵生成单元,用于将所述映射特征矩阵生成单元获得的所述映射特征矩阵通过经训练阶段训练完成的所述第二卷积神经网络以获得融合特征矩阵;待预测水位获取单元,用于获取待预测的水位站的水位特征向量;分类特征向量生成单元,用于将所述待预测水位获取单元获得的所述待预测的水位站的水位特征向量作为查询向量与所述融合特征矩阵生成单元获得的所述融合特征矩阵进行矩阵相乘以获得分类特征向量;以及分类单元,用于将所述分类特征向量生成单元获得的所述分类特征向量通过分类器以获得分类结果,所述分类结果用于表示带预测的水位站的水位变化情况。8.根据权利要求7所述的基于水位联动的水位预测系统,其中,所述编码单元,进一步用于:使用所述编码器模型的嵌入层将各个所述水位站在各个时间点的水位数据分别映射为嵌入向量以获得对应于每个所述水位站的嵌入向量的序列;将各个所述水位站的嵌入向量的序列输入所述转换器模型的转换器以获得对应于各个所述水位站的特征向量的序列;以及,将各个所述水位站的特征向量的序列中各个特征向量进行级联以获得各个所述水位站的水位特征向量。9.根据权利要求7所述的基于水位联动的水位预测系统,其中,所述第一卷积单元,进一步用于:在所述第一卷积神经网络的各层的层正向传递过程中对来自上一层的输入数据进行卷积处理,沿通道维度的均值池化处理和激活处理以获得所述拓扑特征矩阵,其中,所述第一卷积神经网络的第一层的输入数据为所述拓扑矩阵。10.根据权利要求7所述的基于水位联动的水位预测系统,其中,所述第二卷积单元,进一步用于:所述第二卷积神经网络中除最后一层以外的各层在层的正向传递中对输入数据进行卷积处理、池化处理和激活处理以由所述第二卷积神经网络的最后第二层输出特征图,其中,所述第二卷积神经网络的第一层的输入数据为所述映射特征矩阵;所述第二卷积神经网络的最后一层对所述特征图进行卷积处理、沿通道维度的全局均值池化处理和激活处理以获得所述融合特征矩阵。
技术总结
本申请涉及水位智能预测的领域,其具体地公开了一种基于水位联动的水位预测方法及其系统,其采用基于上下文的编码器模型对每个水位站在各个时间点的水位数据进行编码处理,同时使用卷积神经网络对所述各个水位站的拓扑矩阵进行特征提取,进一步再将所述各个水位站的水位特征映射到拓扑特征空间中,并且采用基于序列进化的约束因数来构造损失函数,从而使得通过更新第二卷积神经网络的参数来促进信息融合,以对于所述水位特征信息与所述拓扑特征信息的融合程度进行判定。这样,可以提高对于水位预测的准确性,以确保船舶的安全航行。以确保船舶的安全航行。以确保船舶的安全航行。
技术研发人员:杨志鹏
受保护的技术使用者:杭州清淮科技有限公司
技术研发日:2022.03.14
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。