1.本发明属于腌制机领域,尤其涉及一种真空滚揉腌制机及使用方法。
背景技术:
2.炸鸡﹑泡菜、水煮鱼等食物的制作过程都离不开“腌制”,每个地区的食物腌制口味风格各不相同,但这些食物的腌制过程中,都存在着时间过短亚硝酸盐超标、时间过长容易产生霉菌、过咸过淡影响味道、腌制温度过高影响口感等的问题。除此之外,很多食物在腌制过程中,还会有气味刺鼻的气体产出,如:硫化氢、氰化氢、甲烷等,这也就是市面上很多腌制品在运输过程中保存不当二次发酵导致包装胀袋的主要原因。这些气体的排出不仅不利于身体健康,还存在污染身边空气的问题。
3.hdm机理是指在真空、低温环境下,食物细胞内的液体易于蒸发,从而在食物内部形成许多压力较低的泡孔,在细胞内外压力差和毛细管效应的共同作用下,外部液体更容易渗入食物结构内部。drp现象是由于真空条件下,食物结构发生改变,细胞间距增大,整体体积膨胀,由此腌制液快速渗透进入固体间质中。在hdm和drp的共同作用下,腌制液的扩散性和渗透性增强,腌制效率得以提高,使得调味料更易于渗入食物细胞内部,从而加速腌制。
4.目前,市面上出现很多利用hdm和drp对食物进行腌制的腌制机,但在使用过程中发现会排放出如硫化氢、氰化氢和甲烷等有害气体,污染环境,并且腌制的食物在热加工后,水分油分流失大,失重多,食物变柴,口感嫩度低,口感差。
5.因此,需要一种新的腌制机以避免有害气体的排出并提高食物腌制后的口感。
技术实现要素:
6.本发明的目的在于,提供一种真空滚揉腌制机及使用方法。本发明具有能避免有害气体排出和提高食物腌制后口感的优点,并且腌制效率高、腌制效果好、能耗低。
7.本发明的技术方案:真空滚揉腌制机,包括底箱,底箱内设有真空泵,底箱的顶部设有驱动机构,底箱的上方设有与驱动装机构连接的罐体,罐体为圆柱形,罐体的内侧壁上设有多个凸块,凸块上设有多个凸点,罐体的一端开口,罐体的开口端设有可拆卸的密封盖,密封盖的轴线处设有旋转接头,旋转接头上设有与真空泵连接的软管。
8.前述的真空滚揉腌制机中,所述驱动机构包括设置在底箱顶部的凹槽,凹槽内设有第一转轴,第一转轴的一侧设有第二转轴,第一转轴的两端和第二转轴的两端均设有与底箱固定的带座轴承,第一转轴上设有至少两个第一滚轮,第一滚轮的一侧设有与第二转轴固定的第二滚轮,第一转轴上设有动力机构。
9.前述的真空滚揉腌制机中,所述动力机构包括电机,电机的输出端与第一转轴的一端固定。
10.前述的真空滚揉腌制机中,所述底箱内设有与真空泵连接的控制器,所述软管上串联有与负压开关,负压开关和真空泵均连接控制器。
11.前述的真空滚揉腌制机中,所述密封盖的内侧壁上设有单向呼吸纸,所述软管通过过滤器连接真空泵,所述底箱内设有与真空泵连接的负离子发生器,负离子发生器连接控制器,真空泵的前后端均设有单向止回阀。
12.前述的真空滚揉腌制机中,所述罐体的外周面上设有与第一滚轮数量相同且位置对应的环形槽。
13.前述的真空滚揉腌制机中,所述底箱的前侧设有与控制器连接的触摸屏;所述密封盖的内侧设有亚硝酸盐传感器,亚硝酸盐传感器靠近密封开的外缘,所述旋转接头通过空心套管连接密封盖,空心套管的外侧设有导电滑环,亚硝酸盐传感器通过导电滑环连接控制器,导电滑环通过支撑座连接底箱,支撑座上设有与控制器连接的涡流式传感器。
14.前述的真空滚揉腌制机中,所述第一滚轮和第二滚轮均为同步轮,第一滚轮和第二滚轮之间设有圆弧齿形的同步带,同步带的外侧设有摩擦层,所述第一滚轮的一侧和第二滚轮的一侧均设有可拆卸的环形板,环形板的外侧设有圆弧形的挡板,挡板位于同步带的外侧。
15.前述的真空滚揉腌制机中,所述罐体的外径11cm、长度30cm,罐体的容量7升。
16.前述的真空滚揉腌制机的使用方法中,包括以下步骤,
17.a、竖起罐体,打开密封盖,将食物和腌制液放入到罐体后,关闭密封盖,将罐体放回,
18.b、通过触摸屏设定电机转速,使罐体转动时的转速达到1.2-1.6r/min,通过触摸屏设定食物的腌制时间,通过触摸屏设定食物腌制时罐体内的真空度-0.1mpa至-0.12mpa,
19.c、通过触摸屏启动真空滚揉腌制机,完成食物的腌制。
20.与现有技术相比,本发明利用横置的罐体容纳食物和腌制液,通过旋转机构带动罐体转动,使食物在腌制的过程中不断的被滚揉,促进腌制液融入到食物中,提高腌制效率。通过在第一滚轮和第二滚轮之间设置皮带,以皮带带动罐体转动,即可避免罐体打滑,减少罐体磨损,还可保证食物持续滚揉,进一步保证腌制效率。通过负压开关实时监测罐体真空度,使食物持续在一定的真空度下进行腌制,保证食物的腌制效果。通过在真空泵的前后端设置单向止回阀,使罐体的气密性好,真空泵只需要间隔工作即可保证罐体的真空度,减少真空泵的工作时间,降低能耗。通过过滤器吸收食物腌制过程中产生的一部分有害气体,通过负离子发生器净化其余部分有害气体,祛除异味,减少环境污染。
21.申请人发现肉类(特别是猪肉)在真空腌制时,肉块会发生膨胀,内部的蛋白质(主要是肌动蛋白和肌球蛋白)在腌制液(腌制液中的食盐和磷酸盐)作用下会发生分离,肌动蛋白he肌球蛋白的保水性好,如果能大量的从肉块中分离出来,就会在肉块中形成牢固的保水网,保水保油效果好,保证肉块在后续热加工中的水分和油分流失少,口感嫩度高,口感好。现有肉块之所以热加工后水分油分流失大就是因为肌动蛋白和肌球蛋白的分离量不足,不能形成保水网。本发明通过增加罐体真空度至-0.1至-0.12mpa,能增加肌球蛋白的提取量,使肉块中形成牢固的保水网,并通过限定罐体的转动速度至1.2-1.6r/min,使保水网的结构不会被破坏,使肉块在热加工中不易流失水分油分,不易变柴,口感嫩度高,口感好。
22.因此,本发明具有能避免有害气体排出和提高食物腌制后口感的优点,并且腌制效率高、腌制效果好、能耗低。
附图说明
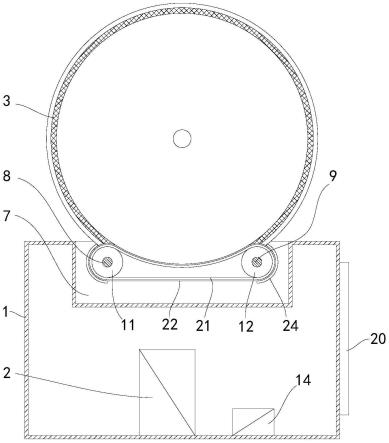
23.图1是本发明的左视图。
24.图2是本发明的正视图。
25.图3是第一滚轮的正视图。
26.图4是导电滑环的结构示意图。
27.图5是支撑座的结构示意图。
28.图6是罐体内部的结构示意图。
29.附图中的标记为:1-底箱,2-真空泵,3-罐体,4-密封盖,5-旋转接头,6-凹槽,7-第一转轴,8-第一转轴,9-第二转轴,10-带座轴承,11-第一滚轮,12-第二滚轮,13-电机,14-控制器,15-负压开关,16-单向呼吸纸,17-过滤器,18-负离子发生器,19-环形槽,20-触摸屏,21-同步带,22-摩擦层,23-环形板,24-挡板,25-单向止回阀,26-凸块,27-亚硝酸盐传感器,28-导电滑环,29-空心套管,30-支撑座,31-涡流式传感器,32-快装板,33-第一触点,34-第二触点,35-定位销,36-铁片,37-凸点。
具体实施方式
30.下面结合附图和实施例对本发明作进一步的说明,但并不作为对本发明限制的依据。
31.实施例。真空滚揉腌制机,如图1所示,包括非完全密封结构的底箱1,底箱1内设有真空泵2,底箱1的顶部设有驱动机构,底箱1的上方设有与驱动装机构连接的罐体3,罐体3为圆柱形,罐体3的内侧壁上设有多个凸块26,凸块26上设有多个凸点37,罐体3的一端开口,罐体3的开口端设有可拆卸的密封盖4,密封盖4的内侧设有密封圈,密封盖4与罐体3卡扣连接或螺接,密封盖4的轴线处设有旋转接头5,旋转接头5上设有与真空泵2连接的软管6。凸块26的作用是增加滚揉效果,凸点37起到进一步的增加作用,凸块26高度8mm左右,凸点37高度1-2mm。
32.所述驱动机构包括设置在底箱1顶部的凹槽7,凹槽7内设有第一转轴8,第一转轴8的一侧设有第二转轴9,第一转轴8的两端和第二转轴9的两端均设有与底箱1固定的带座轴承10,第一转轴8上设有至少两个第一滚轮11,第一滚轮11的一侧设有与第二转轴9固定的第二滚轮12,第一转轴8上设有动力机构。
33.所述动力机构包括电机13,电机13的输出端与第一转轴8的一端固定。
34.所述底箱1内设有与真空泵2连接的控制器14,所述软管6上串联有与负压开关15,负压开关15和真空泵2均连接控制器14。
35.所述密封盖4的内侧壁上设有单向呼吸纸16,所述单向呼吸纸16用于防止罐体3内的腌制液进入到真空泵2中,避免真空泵2损坏。所述软管6通过过滤器17连接真空泵2,所述过滤器17中具有改性活性炭,利用改性活性炭的吸附作用进行过滤,为现有技术。所述底箱1内设有与真空泵2连接的负离子发生器18,负离子发生器18连接控制器14,真空泵2的前后端(即真空泵2的进气端和出气端)均设有单向止回阀25。
36.所述罐体3的外周面上设有与第一滚轮11数量相同且位置对应的环形槽19。环形槽19用于防止罐体3在转动时轴向移动,避免罐体3掉落。
37.所述底箱1的前侧设有与控制器14连接的触摸屏20;所述密封盖4的内侧设有亚硝
酸盐传感器27,亚硝酸盐传感器27靠近密封盖4的外缘,密封盖4的外侧设有与亚硝酸盐传感器27位置对应的铁片36,所述旋转接头5通过空心套管29连接密封盖4,单向呼吸纸16覆盖在空心套管29与密封盖4的连接处,空心套管29的外侧设有导电滑环28,亚硝酸盐传感器27通过导电滑环28连接控制器14,导电滑环28输入端的信号线穿过空心套管29后连接亚硝酸盐传感器27,导电滑环28的底部设有快装板32,快装板32通过支撑座30连接底箱1,快装板32摆放在支撑座30上。快装板的底部设有第一触点33,支撑座30的顶部设有第二触点34,第一触点33与第二触点34的位置对应,导电滑环28输入端的的信号线穿过空心套管29后连接亚硝酸盐传感器27,导电滑环28输入端的的信号线连接第一触点33,第二触点34连接控制器14。亚硝酸盐传感器27产生的信号经第一触点33、第二触点34传递到控制器14。快装板32的底部设有插入到支撑座30的定位销35。
38.支撑座30上设有与控制器14连接的涡流式传感器31。当密封盖4旋转而使亚硝酸盐传感器27处于最低位置时,铁片36与涡流式传感器31处于相同高度且位置靠近,涡流式传感器31产生信号。当选用的亚硝酸盐传感器27上具有较多的金属零件,以至于亚硝酸盐传感器27接近涡流式传感器31时能够被涡流式传感器31检测到时,也可不要铁片36。
39.所述第一滚轮11和第二滚轮12均为同步轮,第一滚轮11和第二滚轮12之间设有圆弧齿形的同步带21,同步带21的外侧设有摩擦层22,所述摩擦层22的材质为橡胶,所述第一滚轮11的一侧和第二滚轮12的一侧均设有螺钉连接的的环形板23,环形板23的外侧设有圆弧形的挡板24,挡板24位于同步带21的外侧,挡板24用于防止同步带21脱出,减少故障率。同步带21挂在第一滚轮11和第二滚轮12之间后,上侧长度较长,中部下垂而形成圆弧形。
40.所述罐体3的外径11cm、长度30cm,罐体3的容量7升。
41.真空滚揉腌制机的使用方法,对猪肉的腌制:包括以下步骤,
42.a、竖起罐体3,打开密封盖4,将猪肉和腌制液放入到罐体3后,关闭密封盖4,将罐体3放回,罐体3受到同步带21、第一滚轮11和第二滚轮12的支撑;
43.b、通过触摸屏20设定电机13转速,使罐体3转动时的转速达到1.2-1.6r/min,最佳为1.4r/min,通过触摸屏20设定猪肉的腌制时间,通过触摸屏20设定猪肉腌制时罐体3内的真空度-0.1mpa至-0.12mpa,最佳为-0.11mpa。
44.c、通过触摸屏20启动真空滚揉腌制机,控制器14使电机13通电,电机13驱动第一转轴8旋转,第一转轴8带动第一滚轮11旋转,第一滚轮11通过同步带21带动第二滚轮12旋转,第二滚轮12带动第二转轴9旋转,在同步带21的旋转作用下,罐体3发生旋转,猪肉在罐体3中翻滚,进行滚揉。控制器14使真空泵2工作,罐体3中的气体经单向呼吸纸16、负压开关15、过滤器17、单向止回阀25、负离子发生器18进入到底箱1中,空气中的一部分有害气体经过滤器17吸收,另一部分有害气体在经过负离子发生器时被消除。当罐体3内的真空度达到设定值时,负压开关15向控制器14发出信号,真空泵2停止工作,在单向止回阀25作用下,罐体3内的真空度变化小,能有效降低真空泵2的工作时间,降低能耗。当设定的腌制时间到后,控制器14使电机13、真空泵2停止工作,将软管6从旋转接头5上拔下,竖起罐体3,此时第一触点33和第二触点34分离,打开密封盖4,可以取出腌制好的猪肉。
45.有些用户对于健康的要求很高,对腌制时产生的亚硝酸盐含量具有较高要求。罐体3每旋转一周,亚硝酸盐传感器27浸润到腌制液中,检测亚硝酸盐浓度,通过控制器14将浓度值输出到触摸屏20,可以使用户实时检测到亚硝酸盐浓度,及时停止腌制,获取到更健
康的食物。当用户要求获取到更加精准的亚硝酸盐浓度时,通过触摸屏20向控制器14发送命令,当罐体3旋转而使亚硝酸盐传感器27位于涡流式传感器31一侧时,铁片36靠近涡流式传感器31,涡流式传感器31向控制器14反馈信号,控制器14使电机停止工作几分钟,使亚硝酸盐传感器27在较长的一端时间内浸润在腌制液中,获取到更加精准的亚硝酸盐浓度。
46.表1是五花肉肉块在不同真空度、罐体3转动速度下,腌制10天后,重量变化至813g,放入110℃的烘箱中加热2小时后的剩余重量集合。
47.48.[0049][0050]
表1
[0051]
从表1中可以看出,罐体3内的真空越强,肉块热加工后的剩余重量越大,但低于-0.11mpa后,增加的剩余重量并不明显,这主要是由于肉块中的肌动蛋白和肌球蛋白已经较为充足的分离,形成了较为牢固的保水网,继续增加真空强度效果已经变化不大,且考虑真空越强,需要的罐体强度越大,罐体厚度增加导致的成本增加,因此,以-0.11mpa最合适。同时,罐体转速也对剩余重量产生影响,转速越高,剩余重量越少,这可能是因为较快的转速下肉块的滚揉次数增增加,对于保水网造成了一定的损害,导致水分油分的流失增多,因此选用1.4r/min的转速较为合适,如果转速继续降低,腌制液与肉块的混合速度减低,又会降低腌制效率。
[0052]
本发明具有能避免有害气体排出和提高食物腌制后口感的优点,并且腌制效率高、腌制效果好、能耗低。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。