1.本发明属于医疗器械技术领域,尤其是指一种基于全髋关节置换术的主从控制式机械平台。
背景技术:
2.人工关节置换手术作为有效治疗股骨头缺血性坏死,髋关节部位严重磨损甚至塌陷的方法。随着老龄化现象的加剧,该手术的数量在中国急速增加。在全髋关节置换手术中坍塌髋臼磨挫与髋臼假体植入是手术关键的步骤,而髋臼假体植入的位置和角度直接影响到后期假体脱位率和髋臼磨损率(使用寿命)的高低,甚至关系到术后并发症的发生率。然而。现有技术上,医生通常通过人工操作,容易出现存在对坍塌髋臼磨挫以及假体植入角度的误差较大,操作稳定性差,准确性和可靠性不高的问题,严重地影响手术的质量和术后的恢复。
3.因此,需要研究一种减少医生操作误差,提高操作的准确性和稳定可靠性的手术机械,以便能更好地保护手术的质量和提高术后恢复的速度。
技术实现要素:
4.本发明的目的在于针对上述问题,提供一种操作简单、准确性高和稳定可靠的基于全髋关节置换术的主从控制式机械平台。本发明将计算机视觉、自动控制技术与全髋关节置换术中的髋臼杯定位与自动磨挫相融合,实现自动化主从控制式机械平台,提高了手术精度和减少人为操作误差,制造成本低。
5.本发明的目的可采用以下技术方案来达到:
6.一种基于全髋关节置换术的主从控制式机械平台及其控制方法,包括支架,设于支架上的xy轴驱动装置,设于xy轴驱动装置上的z轴驱动装置,安装于z轴驱动装置上的磨挫机械手,设于磨挫机械手上方且用于感知与监控手术执行过程情况的双目相机装置,以及与xy轴驱动装置、z轴驱动装置、双目相机装置和磨挫机械手连接的控制器;xy轴驱动装置驱动z轴驱动装置和磨挫机械手在x和y轴方向滑动,所述z轴驱动装置驱动磨挫机械手在z轴方向滑动;在控制器控制磨挫机械手工作时,控制器通过双目相机装置拍摄并获取磨挫机械手的实时位置数据,然后控制器通过获得的位置数据,控制xy轴驱动装置和z轴驱动装置的驱动磨挫机械手移动到x轴、y轴和z轴方向的相应位置上。
7.作为一种优选的方案,所述xy轴驱动装置包括长度沿x轴方向设置于支架上的两个第一导轨,设于支架上的两个第一电机,可滑动安装于第一导轨上的第一滑块,两端分别与两个第一导轨固定连接的连接板,与第一电机的转轴固定连接的主动带轮,可旋转安装于支架的两个第一从动带轮,安装于连接板上的两端上的各一对第二从动带轮,长度沿支架的y轴方向设置且安装于连接板上的第二导轨,可滑动安装于第二导轨上的第二滑块,与第二滑块固定连接的第一连接块,以及依次与主动带轮、第二从动带轮和第一从动带轮啮合的皮带,且皮带与第一连接块连接。所述支架和第一连接块上分别设有用于检测第一连
接块在x轴和y轴方向的第一传感器和第二传感器。
8.作为一种优选的方案,所述z轴驱动装置包括固定安装于第一连接块上的框架,沿支架的z轴方向设置且固定安装于框架上的第三导轨,可滑动安装于第三导轨上的第三滑块,设于框架上的第二电机,可旋转安装于框架上的螺杆,以及与螺杆螺纹传动连接的螺母;所述磨挫机械手与第三滑块固定连接,且磨挫机械手与螺母固定连接;第二电机驱动螺杆旋转,螺杆带动螺母和磨挫机械手沿着支架的z轴滑动。
9.作为一种优选的方案,所述双目相机装置包括固定安装于支架上表面的安装架,以及安装于安装架上的双目相机;所述安装架包括第一拼接板、第二拼接板和第三拼接板,所述第一拼接板和第二拼接板均设为两块,第二拼接板的两端分别与两块第一拼接板卡接,所述第三拼接板与第二拼接板和第一拼接板的上端相卡接。
10.作为一种优选的方案,所述磨挫机械手包括与第三滑块和螺母固定连接的第二连接块,与第二连接块固定连接的底座,一端与底座铰接的大臂,一端与大臂的另一端铰接的小臂,与小臂的另一端铰接的磨挫关节,安装于磨挫关节上的第三电机,以及与第三电机的转轴连接的磨挫头。
11.作为一种优选的方案,所述皮带为同步带,所述主动带轮、第二从动带轮和第一从动带轮为同步带轮。
12.作为一种优选的方案,所述第一连接块上设有夹块,所述夹块将皮带夹紧在第一连接块上。
13.作为一种优选的方案,所述第一电机为步进电机。
14.作为一种优选的方案,所述第二电机为步进电机。
15.作为一种优选的方案,所述第一传感器和第二传感器为光电传感器。
16.实施本发明,具有如下有益效果:
17.本发明在磨挫机械手对病人进行手术时,xy轴驱动装置驱动磨挫机械手在x和y轴方向滑动,而z轴驱动装置驱动磨挫机械手在z轴方向滑动。在该过程中,控制器实时通过双目相机装置检测和追踪磨挫机械手的准确位置,并根据手术的预设轨迹对磨挫机械手的位置进行调节和控制,实现自动化和高精确控制的功能。本结构采用硬件成本低的双目相机装置进行追踪,摒弃了现有高价的光学追踪系统,具有结构简单、成本低和使用更加方便的优点。
附图说明
18.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
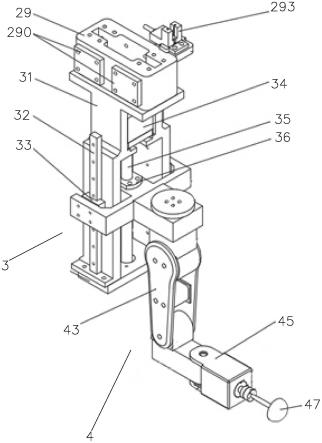
19.图1是本发明基于全髋关节置换术的主从控制式机械平台的结构示意图。
20.图2是图1的z轴驱动装置和磨挫机械手的安装结构示意图。
21.图3是图1的磨挫机械手的结构示意图。
22.图4是图1的z轴驱动装置的结构示意图。
23.图5是图1的xy轴驱动装置和双目相机装置的安装结构示意图。
24.图6是图1的连接板和第一连接块的安装结构示意图。
25.图7是图6的侧视图。
26.图8是平面x1oy1坐标系与平面xoy坐标系关系原理图。
27.图9是hbot结构运动原理图。
28.图10是图1的磨挫机械手结构简图。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.实施例
31.参照图1至图6,本实施例涉及基于全髋关节置换术的主从控制式机械平台,包括支架1,设于支架1上的xy轴驱动装置2,设于xy轴驱动装置2上的z轴驱动装置3,安装于z轴驱动装置3上的磨挫机械手4,设于磨挫机械手4上方且用于感知与监控手术执行过程情况的双目相机装置5,以及与xy轴驱动装置2、z轴驱动装置3、双目相机装置5和磨挫机械手4连接的控制器;xy轴驱动装置2驱动z轴驱动装置3和磨挫机械手4在x和y轴方向滑动,所述z轴驱动装置3驱动磨挫机械手4在z轴方向滑动;在控制器控制磨挫机械手4工作时,控制器通过双目相机装置5拍摄并获取磨挫机械手4的实时位置数据,然后控制器通过获得的位置数据,控制xy轴驱动装置2和z轴驱动装置3的驱动磨挫机械手4移动到x轴、y轴和z轴方向的相应位置上。所述控制器为单片机或plc。
32.在磨挫机械手4对病人进行手术时,xy轴驱动装置2驱动磨挫机械手4在x和y轴方向滑动,而z轴驱动装置3驱动磨挫机械手4在z轴方向滑动。在该过程中,控制器实时通过双目相机装置5检测和追踪磨挫机械手4的准确位置,并根据手术的预设轨迹对磨挫机械手4的位置进行调节和控制,实现自动化和高精确控制的功能。本结构采用硬件成本低的双目相机装置5进行追踪,摒弃了现有高价的光学追踪系统,具有结构简单、成本低和使用更加方便的优点。
33.如图2至图7所示,所述xy轴驱动装置2包括长度沿x轴方向设置于支架1上的两个第一导轨21,设于支架1上的两个第一电机22,可滑动安装于第一导轨21上的第一滑块220,两端分别与两个第一导轨21固定连接的连接板23,与第一电机22的转轴固定连接的主动带轮24,可旋转安装于支架1的两个第一从动带轮25,安装于连接板23上的两端上的各一对第二从动带轮26,长度沿支架1的y轴方向设置且安装于连接板23上的第二导轨27,可滑动安装于第二导轨27上的第二滑块28,与第二滑块28固定连接的第一连接块29,以及依次与主动带轮24、第二从动带轮26和第一从动带轮25啮合的皮带,且皮带与第一连接块29连接。所述支架1和第一连接块29上分别设有用于检测第一连接块29在x轴和y轴方向的第一传感器292和第二传感器293。所述皮带为同步带,所述主动带轮24、第二从动带轮26和第一从动带轮25为同步带轮。所述两个第一电机22分别为电机a221和电机b222。
34.将主动带轮24、第一从动带轮25和第二从动带轮26组成的hbot机构模型简化,如图9,第一连接块29在x和y方向的运动通过同步带的拉力控制。
35.第一连接块29的位移与步进电机a和步进电机b转角之间的关系为:
[0036][0037][0038]
其中δx和δy分别表示第一连接块29在x和y方向的位移;θ
11
和θ
12
表示电机a和电机b的转角;r表示主动带轮24的直径。
[0039]
在电机单独运动的情况下由(1.9)和(1.10)可知,当电机a转动而电机b不转动时,θ
12
的转角为0,如式(1.11)所示:
[0040][0041]
同理,当电机b转动而电机a不转动时,θ
11
的转角为0,如式(1.12)所示:
[0042][0043]
由(1.9)-(1.12)可知,第一连接块29在每个方向的运动分量都必须受两个电机的协调控制完成.为了简化运算,我们需要将每个步进电机的控制分量只对应一个坐标轴,从而实现分别对2个电机进行控制和协调。从电机的单独运动可以发现,x和y轴方向上的位移相等,即第一连接块29的合运动与x和y方向的运动成π/4夹角,同时电机a和电机b在单独正转过程中对应的合运动方向是垂直的。基于这个运动特征,本发明重新建立一个新的坐标系,分别以步进电机a和电机b单独运动时的和运动方向为x和y的正方向。实际上,新的坐标系相当于在原来坐标系的基础上以原点为旋转中心,顺时针旋转了π/4,如图8所示。
[0044]
步进电机a和步进电机b分别对应的点在新坐标系中x1oy1与原坐标系xoy的位置关系,如式(1.13)所示,其中θ为π/4。
[0045][0046]
所述z轴驱动装置3包括固定安装于第一连接块29上的框架31,沿支架1的z轴方向设置且固定安装于框架31上的第三导轨32,可滑动安装于第三导轨32上的第三滑块33,设于框架31上的第二电机34,可旋转安装于框架31上的螺杆35,以及与螺杆35螺纹传动连接的螺母36;所述磨挫机械手4与第三滑块33固定连接,且磨挫机械手4与螺母36固定连接;第二电机34驱动螺杆35旋转,螺杆35带动螺母36和磨挫机械手4沿着支架1的z轴滑动。所述螺杆35通过轴承37安装于框架31上。
[0047]
所述双目相机装置5包括固定安装于支架1上表面的安装架51,以及安装于安装架51上的双目相机52;所述安装架51包括第一拼接板511、第二拼接板512和第三拼接板513,所述第一拼接板511和第二拼接板512均设为两块,第二拼接板512的两端分别与两块第一拼接板511卡接,所述第三拼接板513与第二拼接板512和第一拼接板511的上端卡接。所述第二拼接板512上设有第一卡扣和第一卡槽,所述第一拼接板511上设有第二卡槽,所述第一卡扣扣接于第二卡槽内。所述第三拼接板513上设有第三卡扣,所述第三卡扣扣接于第一卡槽和第二卡槽内。
[0048]
所述磨挫机械手4包括与第三滑块33和螺母36固定连接的第二连接块41,与第二连接块41固定连接的底座42,一端与底座42铰接的大臂43,一端与大臂43的另一端铰接的
小臂44,与小臂44的另一端铰接的磨挫关节45,安装于磨挫关节45上的第三电机46,以及与第三电机46的转轴连接的磨挫头47。
[0049]
简化磨挫机械手4模型对其分析,底座42对应连杆l1、大臂43对应连杆l2、小臂44对应连杆l3、磨挫关节45对应连杆l4和磨挫头47对应连杆l5,则机械手的主要参数有:五根连杆长度分别为l1,l2,l3,l4和l5;三个转动角θ1,θ2,θ3和一个辅助角前两个转动角是平面xoz的转角,第三个是以面yoz逆时针旋转一定角度做为基准面的转角,第四个是平面xoz的辅助角;三自由度的髋臼杯定位机械臂末端执行器坐标为(x,y,z),如图10所示.我们可以利用角θ1,θ2和θ3计算出外展角α和前倾角β,如式(1.1)-(1.2)所示:
[0050][0051]
β=θ3ꢀꢀꢀ
(1.2)
[0052]
根据在磨挫机械手处建立的坐标系以及三角函数,我们可以求出连杆中各个节点的坐标,如(1.3)-(1.8)所示:
[0053]
a=(x0,y0,z0)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1.3)
[0054]
b=(x0,y0,z0 l1)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1.4)
[0055]
c=(x0 l2sinθ1,y0,z0 l
1-l2cosθ1)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1.5)
[0056]
d=(x0 l2sinθ
1-l3sin(θ1 θ2),y0,z0 l
1-l2cosθ1) l3cos(θ1 θ2))
ꢀꢀꢀꢀ
(1.6)
[0057]
e=(x0 l2sinθ
1-l3sin(θ1 θ2)-l4cos(θ1 θ2),y0,z0 l
1-l2cosθ1) l3cos(θ1 θ2)-l4sin(θ1 θ2))
ꢀꢀꢀ
(1.7)
[0058][0059]
整个磨挫装置在平面内的合成运动将会以图8展示的虚线所示,建立的平面坐标系为x1oy1,我们设定的坐标系则是xoy,二者存在角度差π/4,因此在分析了设定的xoy平面坐标系与实际合成运动建立的x1oy1平面坐标系的关系后,将xoy平面坐标系转化为平面x1oy1坐标系,统一运动关系,如式(1.13)所示。
[0060]
在全髋关节置换手术中,髋臼假体需要以特定的角度植入,在手术医生提供了髋臼假体植入所需的前倾角b与外展角α后,利用式(1.1)可以明确θ1和θ2满足的关系,而θ1和θ2是满足关系的任意一组值,利用双目相机52可以测量出图10中a点的坐标,基于连杆l1,l2,l3,l4和l5的长度已知,于是可计算出执行器末端即磨挫头47的三维坐标,推算过程见式(1.3)-(1.8)。
[0061]
所述第一连接块29上设有夹块290,所述夹块290将皮带夹紧在第一连接块29上。所述第一电机22为步进电机。所述第二电机34为步进电机。所述第一传感器和第二传感器为光电传感器。
[0062]
以上所揭露的仅为本发明一种较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
