一种基于元胞自动机的混入acc和cacc车辆的交通流特性仿真方法
技术领域
1.本发明属于智能网联和无人驾驶领域,提出了一种手动驾驶车辆和acc、cacc车辆共存的交通流特性仿真方法,分别建立了手动驾驶车辆和acc、cacc车辆的跟车模型,实现了混合交通流的特性仿真。
背景技术:
2.自适应巡航控制(adaptive cruise control,acc)和协同自适应巡航控制(cooperative adaptive cruise control,cacc)技术的应用使自动驾驶车辆上路行驶成为可能,然而自动驾驶替代传统的手动驾驶需要一个漫长的过程,期间由手动和自动驾驶车辆组成的混合流将在道路上长期存在,因此混有手动驾驶、acc和cacc车辆的交通流系统是研究自动驾驶技术应用的热点。
3.acc和cacc车辆装备了雷达和摄像头,能精确捕获外界交通环境信息,感知周边车辆驾驶行为,对前车运动状态的变化快速反应并制定驾驶策略。cacc车辆借助短途无线通信,建立与其余cacc车辆的实时通信,彼此共享行车数据,因此具有捕获精度更高、感知范围更大、行车间距更小的优点。近年来,众多学者聚焦于混合交通流,以手动驾驶车辆和自动驾驶、智能网联车辆为研究对象,分析引入自动驾驶或者智能网联车辆对道路交通流的影响,同时考虑了智能网联车退化的情形;基于nasch模型,融合传统交通流模型和真实驾驶行为,提出和改进了一系列自动驾驶元胞自动机模型,通过数值模拟实现混合交通流的仿真过程。
4.目前,在对含有手动驾驶车辆和自动驾驶车辆的混合交通流建模时,虽然考虑了cacc车辆功能退化为acc的情形,但并未对手动驾驶、acc和cacc三类车辆独立存在的道路交通流系统进行研究。
技术实现要素:
5.针对手动驾驶、acc和cacc三类车辆独立存在时的单车道交通流运行特性研究不足的问题,本发明分别建立了手动驾驶、acc和cacc车辆的动力学模型,即可分析不同渗透率的acc和cacc车辆对混合交通流行驶速度、行车间距、拥堵状况和道路通行能力等运行特性的影响,其中,手动驾驶车辆采用gipps安全距离模型,自动驾驶车辆采用加州伯克利大学path实验室通过实车标定的acc和cacc模型。
6.对于手动驾驶车辆,考虑驾驶员的生理、心理状态和外界交通环境的影响,为确保行车安全,结合驾驶员正常的反应时间,基于gipps安全间距和速度,构建元胞自动机模型;acc和cacc车辆的运动过程由车载雷达和摄像头感知周围车辆的运动状态、计算机制定行车策略、控制单元执行决策组成,其中cacc车辆具有通信功能,能实时共享行车数据,采用加州伯克利大学path实验室标定的acc和cacc模型来仿真车辆的跟车行为。
7.根据gipps安全模型,考虑驾驶员的反应时间,为保证行驶安全,车辆n在跟随前车
的过程中所需要的最小安全距离和最大安全速度由式(1)和(2)求得。
[0008][0009][0010]
式中:d
n,safe
、v
n,safe
(t)分别为车辆n跟随前车所需要的安全间距和速度;xn(t)、vn(t)分别为t时刻车辆n所在的位置和行驶速度;x
n-1
(t)、v
n-1
(t)分别为t时刻车辆n的前车所在的位置和行驶速度;l
n-1
为车辆n的前车车长;b为车辆的最大减速度;τn为车辆n驾驶员的反应时间。
[0011]
对于手动驾驶车辆,反应时间为驾驶员感知前车运动状态变化并执行驾驶操作的时间;对于acc车辆,反应时间为车载传感器捕获前车驾驶信息和中枢计算机系统制定驾驶策略的时间,相较于手动驾驶车辆更小;对于cacc车辆,当跟随的前车同为cacc车辆时,则可实现与前车的实时通信,反应时间可忽略,否则,cacc车辆功能退化为acc。
[0012]
参考nasch模型加速、减速、随机慢化、位置更新四步规则,构建考虑gipps安全距离的元胞自动机模型。
[0013]
(1)加速。
[0014]
当dn>d
n,safe
时,为追求更高的行驶速度,车辆n会加速。
[0015]
vn(t 1)=min(vn(t) an(t),v
max
,dn,v
n,safe
(t))
ꢀꢀ
(3)
[0016]
式中:vn(t 1)为车辆n下一时刻的速度;an(t)为车辆的加速度;v
max
为车辆的最大速度;dn=x
n-1-x
n-l
n-1
为车辆n车头至前车车尾的距离。对于手动驾驶车辆,an(t)=a
max
,a
max
为车辆的最大加速度;对于acc车辆,an(t)=min(a,a
max
),a由式(4)求得。
[0017]
a1=k1(x
n-1
(t)-xn(t)-thwvn(t)) k2(v
n-1
(t)-vn(t))
ꢀꢀ
(4)
[0018]
式中k1和k2为模型控制参数,t
hw
为期望车间时距;对于cacc车辆,若其前车为手动驾驶
[0019]
或acc车辆,则通信功能发生退化,速度更新规则与acc车辆相同,否则,与前车可实时
[0020]
共享行车数据,加速规则遵循公式(5)。
[0021][0022]
式中:en(t)为t时刻车辆n实际式中:en(t)为t时刻车辆n实际车间距和期望车间距的差值,为en(t)的微分,k
p
和kd为模型控制参数车间距和期望车间距的差值,为en(t)的微分,k
p
和kd为模型控制参数。
[0023]
(2)减速。
[0024]
当dn<d
n,safe
时,为避免发生追尾,车辆n会减速;当前车减速至停止,即vn(t)=0时,为保证两车停止时的间距不小于1m,车辆n采取安全减速规则,否则,按照确定性减速规则进行减速;当dn=d
n,safe
时,车辆n将保持匀速行驶状态。
[0025]
安全减速:
[0026]
vn(t 1)=max[min(v
n,safe
(t),d
n-1),0]
ꢀꢀ
(6)
[0027]
确定性减速:
[0028]
vn(t 1)=max[min(v
n,safe
(t),dn),0]
ꢀꢀ
(7)
[0029]
匀速行驶:
[0030]
vn(t 1)=min(vn(t),dn)
ꢀꢀ
(8)
[0031]
(3)随机慢化。
[0032]
对手动驾驶车辆,引入慢化概率r,模拟随机减速过程;对acc和cacc车辆,不受人为因素的影响,无随机慢化。
[0033]
vn(t 1)=max(vn(t)-b,0),rand(1)<r
ꢀꢀ
(9)
[0034]
(4)位置更新。
[0035]
车辆完成速度更新后,更新下一时刻的位置。
[0036]
xn(t 1)=xn(t) vn(t 1)
ꢀꢀ
(10)
[0037]
式中:xn(t 1)为车辆n下一时刻的位置。
附图说明
[0038]
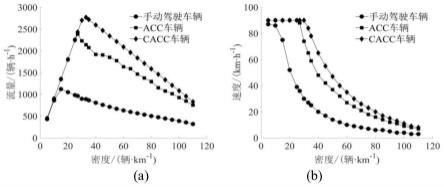
图1为手动驾驶车辆和acc、cacc车辆基本图;(a)流量-密度(b)速度-密度。
[0039]
图2为不同acc和cacc车辆渗透率下的基本图;(a)流量-密度;(b)速度-密度。
[0040]
图3为不同acc和cacc车辆渗透率下的轨迹图。(a)p=0.0;(b)p=0.4;(c)p=0.8;(d)p=1.0。
具体实施方式
[0041]
以长度l=5km的快速路单车道为例,采用周期性边界条件。仿真初始时刻将手动驾驶、acc和cacc三类车辆离散分布在道路上并赋予初始速度(取值范围为[5,v
max
])。仿真时长为10000s,为消除随机暂态影响,记录最后1000s的数据进行分析;设道路车辆数为n,交通密度k=n/l,车辆平均速度t为仿真时长,则在道路交通密度k下的平均交通量仿真参数及其取值如表1所示。
[0042]
表1仿真参数
[0043][0044][0045]
利用matlab仿真平台,搭建了手动驾驶、acc和cacc三类车辆独立存在时的单车道交通流场景,在不同的acc和cacc车辆渗透率下仿真了车辆的跟车行为。
[0046]
道路由纯手动、acc或cacc车辆驾驶时的交通量-密度-速度关系如图1所示。由图1的(a)可知,在交通密度较小时,三类车辆的流量与密度均呈线性关系,此时交通流处于自由流状态;随着密度的增大,手动驾驶车辆率先达到临界密度,而acc和cacc车流量仍随密度线性增加;当acc和cacc车辆达到临界状态时,交通密度分别为27辆/km和33辆/km,此时对应道路的通行能力分别为2382辆/h和2769辆/h;当交通密度继续增大时,道路上车辆越来越多,致使车辆相互制约、干扰严重,车流缓慢行驶,交通流处于拥堵状态。由图1的(b)可知,随着交通密度的增大,手动驾驶车辆平均速度逐渐减小,acc和cacc车辆先保持自由流速度行驶,达到临界状态后速度递减;对应于道路同一交通密度,acc和cacc车辆平均速度均显著高于手动驾驶车辆,cacc车辆行车间距更小、感知范围更大,平均速度高于acc车辆。
[0047]
以自动驾驶车辆渗透率p=0.1至1.0进行十组等间距数值仿真试验,在每一渗透率中acc和cacc车辆的数目相等,分析引入acc和cacc车辆对混合交通流运行特性的影响。由图2的(a)可知,在道路同一交通密度下,随着手动驾驶车辆中混入的acc和cacc车辆越多,道路车流量得到了显著提高,当p=1.0,即道路仅由数目相等的acc和cacc车辆驾驶时,通行能力达到了2529辆/h,是纯手动驾驶时的2.2倍。由图2的(b)可知,随着道路交通密度的提高,车流行驶速度均呈下降趋势,但其随acc和cacc车辆渗透率的增加而显著提高。当cacc车辆前车为手动驾驶或acc车辆时,车车通信功能失效,研究cacc退化为acc车辆对道路通行能力的影响。
[0048]
图3为道路交通密度在30辆/km、仿真时间9000~10000s、不同acc和cacc渗透率下的车辆时空轨迹图。由图3的(a)可知,当道路为纯手动驾驶时,轨迹图上阻塞带宽度较大且存在时间长,表明道路在长时间内处于拥堵状态,车辆走、停现象多发且交替。如图3的(b)所示,当p=0.4时,阻塞带仍然存在,但其宽度和存在时间减小,小阻塞、消散快的特点凸
显。如图3的(c)所示,车辆时空轨迹线清晰、顺直,交通流处于快速行驶的状态。如图3的(d)所示,
[0049]
当p=1.0时,acc和cacc车辆行车间距小、行驶速度高,交通流处于自由流状态。根据以上不同渗透率下的车辆时空轨迹特性分析,当手动驾驶车辆中混入的acc和cacc车辆越多,轨迹图上形成的交通阻塞范围逐渐减小且拥堵很快得到消散,拥堵波的反向传播及其对交通流的扰动影响逐渐减弱,acc和cacc车辆改善了交通运行,减少了交通瓶颈的发生,有效缓解了交通拥堵。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。