技术特征:
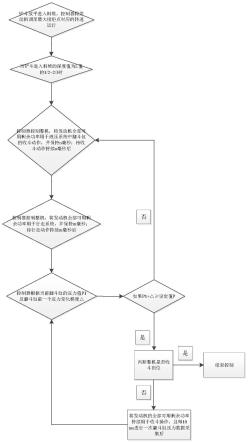
1.一种装载机自动铲料控制方法,其特征在于,控制器控制行走系统和液压系统交替进行周期性的收斗动作和行走动作,且发动机在进行其中任何一个动作时,输出全部可用功率,而对另一个动作不输出功率,并且控制器会根据当前收斗压力值和前一个收斗压力梯度,评估交替动作是否继续,或者持续进行收斗动作,直至完成收斗。2.根据权利要求1所述的装载机自动铲料控制方法,其特征在于,当前收斗压力值与前一个收斗压力梯度之和小于设定压力p时,控制器控制整机进行动作n;动作n:将发动机全部可用剩余功率用于收斗动作,并保持n毫秒,在此期间,发动机不向行走系统输出功率;待收斗动作持续n毫秒后,将发动机全部可用剩余功率用于行走系统,并保持m毫秒,在此期间,发动机不向液压系统输出功率。3.根据权利要求2所述的装载机自动铲料控制方法,其特征在于,当前收斗压力值与前一个收斗压力梯度之和大于等于设定压力p时,控制器判定是否收斗到位,并进行动作m,或者结束铲料动作;动作m:控制器控制整机将发动机全部可用功率持续用于收斗动作,而不再进行行走功率输出,并且每10 ms进行一次收斗压力数据采集。4.根据权利要求3所述的装载机自动铲料控制方法,其特征在于,当铲斗没有收斗到位时,先执行动作m后,根据采集的当前压力值和前一个压力梯度,再次进行判定:当前收斗压力值与前一个收斗压力梯度之和小于设定压力p时,控制器控制整机进行循环动作n,令n=n 1。5.根据权利要求4所述的装载机自动铲料控制方法,其特征在于,当前收斗压力值与前一个收斗压力梯度之和大于等于设定压力p时,控制器再次判定是否收斗到位,当没有收斗到位时,进行动作m,令m=m 1,或者结束铲料动作。6.根据权利要求3或5所述的装载机自动铲料控制方法,其特征在于,当铲斗收斗到位时,结束铲料动作。7.根据权利要求1所述的装载机自动铲料控制方法,其特征在于,当铲斗放平进入料堆时,控制器将发动机调至最大扭矩点对应的转速运行。8.根据权利要求1所述的装载机自动铲料控制方法,其特征在于,控制器上连接有踏板和手柄,在自动铲料期间,踏板的角度输入信号变为开关量,手柄的角度输入信号变为开关量,踏板的角度不控制行走系统的功率输出,控制器暂时屏蔽掉踏板的模拟量信号;手柄的角度不控制收斗动作,控制器暂时屏蔽掉手柄的模拟量信号。9.根据权利要求1所述的装载机自动铲料控制方法,其特征在于,当铲斗进入料堆的深度值为l值的1/2~2/3时,控制器开始进行交替动作。10.根据权利要求9所述的装载机自动铲装控制方法,其特征在于,所述l值为从铲斗的主刀板的最前沿至斗壁板内侧距离主刀板最远点,在水平地面的垂直投影的长度值。
技术总结
本发明公开了一种装载机自动铲料控制方法,所述方法包括如下步骤:控制器控制行走系统和液压系统交替进行周期性的收斗动作和行走动作,且发动机在进行其中任何一个动作时,输出全部可用功率,而对另一个动作不输出功率,并且控制器会根据当前收斗压力值和前一个收斗压力梯度,评估交替动作是否继续,或者持续进行收斗动作,直至完成收斗。本发明能够在整机瞬时铲料的过程中实现自动控制,保持铲料的最大功率需求,同时可通过预知掘起力的变化而进行高效的铲料作业,以有效避免铲料过多,液压系统无法收斗,整机后轮离地的问题,同时,还能够解决铲斗铲料过少,没有铲满,需要进行二次铲料的低效问题,极大的提高了装载机自动铲料的工作效率。铲料的工作效率。铲料的工作效率。
技术研发人员:魏加洁 王小虎 韩嫔 王振 郁干 武庆鑫 齐陆燕 李伯宇
受保护的技术使用者:徐工集团工程机械股份有限公司科技分公司
技术研发日:2022.03.28
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。