1.本实用新型涉及用于重锤式机械钟机芯的自动拉锤装置技术领域,尤其涉及一种用于重锤式机械钟机芯的自动拉锤装置。
背景技术:
2.重锤式机械钟尤其是重锤式机械落地钟以其豪华典雅而备受消费者喜爱,但由于重锤式机械落地钟是以重锤的势能为动力,需要人工经常提拉重锤。
3.经检索,现有的自动拉锤机构一般通过伺服电机带动转动轴对重锤进行提拉,但是需要用到的机构较为繁琐,维护不便。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种用于重锤式机械钟机芯的自动拉锤装置。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.一种用于重锤式机械钟机芯的自动拉锤装置,包括固定架,且固定架与外部机械钟通过螺栓螺纹连接,所述固定架顶端一侧固定连接有伺服电机,所述伺服电机的输出端固定连接有转动杆,所述固定架一侧开设有圆形开口,所述转动杆一端在圆形开口处通过转轴转动连接有转动柱,所述固定架一侧底端固定连接有连接架,且连接架底端通过转轴转动连接有转动柱,且转动柱外部固定连接有拉绳,且拉绳底端与外部重锤固定连接,所述转动柱一端外部固定连接有电磁铁,转动柱外部在电磁铁的一侧处滑动连接有磁板,且磁板与电磁铁之间固定连接有弹簧条,所述磁板一侧固定连接有卡杆,所述转动杆一端外部固定连接有连接环,所述连接环外部开设有齿槽,所述齿槽与转动杆的距离和卡杆与转动杆的距离相等。
7.进一步的,所述固定架顶端在伺服电机的一侧处固定连接有控制盒,所述转动柱一端通过棘齿轮机构与外部机械钟机芯相连。
8.进一步的,所述控制盒内部设有控制模块,处理模块,计时模块和供电模块,所述控制盒与伺服电机电性连接。
9.进一步的,所述固定架一侧固定连接有金属传感器。
10.进一步的,所述拉绳靠近重锤的一端外部固定连接有感应块。
11.进一步的,所述卡杆外部固定连接有橡胶层。
12.本实用新型的有益效果为:
13.1、通过设置转动杆,电磁铁,磁板,连接环,齿槽和卡杆,当需要拉动重锤时,首先控制盒内部的控制模块带动电磁铁与伺服电机通电,此时电磁铁具有磁性并吸附磁板,磁板带动卡杆穿过固定架的圆形开口,随着伺服电机带动连接环转动,卡杆一端插入插入连接环的齿槽内部,此时伺服电机带动转动杆和转动柱一起转动,转动柱带动拉绳收卷在转动柱的外部,当将重锤提拉完毕后,断开伺服电机和电磁铁的电路,此时由于弹簧条的弹性
作用,磁板自动回位,卡杆不再与齿槽相互卡合,此时转动柱由于重锤的重力作用,自动在连接架处发生转动,并带动外部机芯报时。
14.2、通过设置金属传感器和感应块,当转动柱带动拉绳收卷时,拉绳带动感应块回收,当感应块到达金属传感器的感应范围内部时,金属传感器感应到感应块并将信号转化为电信号,使伺服电机和电磁铁关闭,提高了装置在需要关闭时的灵敏性。
15.3、通过设置橡胶层,当卡杆与齿槽相互卡合时,卡杆外部的橡胶层增大了齿槽之间的摩擦力,从而提高了卡杆与齿槽之间卡合时的稳定性。
附图说明
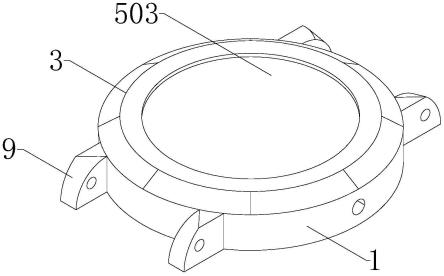
16.图1为实施例1提出的一种用于重锤式机械钟机芯的自动拉锤装置的正视图;
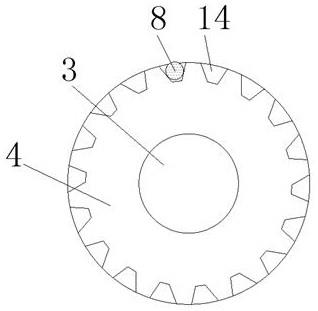
17.图2为实施例1提出的一种用于重锤式机械钟机芯的自动拉锤装置的齿槽侧视图;
18.图3为实施例2提出的一种用于重锤式机械钟机芯的自动拉锤装置的橡胶层侧视图。
19.图中:1-固定架、2-伺服电机、3-转动杆、4-连接环、5-电磁铁、 6-弹簧条、7-磁板、8-卡杆、9-转动柱、10-拉绳、11-感应块、12
‑ꢀ
金属传感器、13-连接架、14-齿槽、15-控制盒、16-橡胶层。
具体实施方式
20.下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
21.下面详细描述本专利的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本专利,而不能理解为对本专利的限制。
22.在本专利的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本专利和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本专利的限制。
23.在本专利的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“设置”应做广义理解,例如,可以是固定相连、设置,也可以是可拆卸连接、设置,或一体地连接、设置。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本专利中的具体含义。
24.实施例1
25.参照图1-2,一种用于重锤式机械钟机芯的自动拉锤装置,包括固定架1,且固定架1与外部机械钟通过螺栓螺纹连接,固定架1顶端一侧粘接有伺服电机2,伺服电机2的输出端粘接有转动杆3,固定架1一侧开设有圆形开口,转动杆3一端在圆形开口处通过转轴转动连接有转动柱9,固定架1一侧底端粘接有连接架13,且连接架 13底端通过转轴转动连接有转动柱9,且转动柱9外部粘接有拉绳 10,且拉绳10底端与外部重锤粘接,转动柱9一端外部粘接有电磁铁5,转动柱9外部在电磁铁5的一侧处滑动连接有磁板7,且磁板 7与电磁铁5之间粘接有弹簧条6,磁板7一侧粘接有卡杆8,转动杆3一端外部粘接有连接环4,连接环4外部开设有齿槽14,齿槽14与转动杆3的距离和卡杆8与转动杆3的距离相等,当需要拉动重锤
时,首先控制盒15内部的控制模块带动电磁铁5与伺服电机2 通电,此时电磁铁5具有磁性并吸附磁板7,磁板7带动卡杆8穿过固定架1的圆形开口,随着伺服电机2带动连接环4转动,卡杆一8 端插入插入连接环4的齿槽14内部,此时伺服电机2带动转动杆3 和转动柱9一起转动,转动柱9带动拉绳10收卷在转动柱9的外部,当将重锤提拉完毕后,断开伺服电机2和电磁铁5的电路,此时由于弹簧条6的弹性作用,磁板7自动回位,卡杆8不再与齿槽14相互卡合,此时转动柱9由于重锤的重力作用,自动在连接架13处发生转动,并带动外部机芯报时。
26.其中,固定架1顶端在伺服电机2的一侧处粘接有控制盒15,转动柱9一端通过棘齿轮机构与外部机械钟机芯相连,控制盒15内部设有控制模块,处理模块,计时模块和供电模块,控制盒15与伺服电机2电性连接,固定架1一侧粘接有金属传感器12,拉绳10靠近重锤的一端外部粘接有感应块11,当转动柱9带动拉绳10收卷时,拉绳10带动感应块11回收,当感应块11到达金属传感器12的感应范围内部时,金属传感器12感应到感应块11并将信号转化为电信号,使伺服电机2和电磁铁关5闭,提高了装置在需要关闭时的灵敏性。
27.工作原理:当需要拉动重锤时,首先控制盒15内部的控制模块带动电磁铁5与伺服电机2通电,此时电磁铁5具有磁性并吸附磁板 7,磁板7带动卡杆8穿过固定架1的圆形开口,随着伺服电机2带动连接环4转动,卡杆一8端插入插入连接环4的齿槽14内部,此时伺服电机2带动转动杆3和转动柱9一起转动,转动柱9带动拉绳 10收卷在转动柱9的外部,当将重锤提拉完毕后,断开伺服电机2 和电磁铁5的电路,此时由于弹簧条6的弹性作用,磁板7自动回位,卡杆8不再与齿槽14相互卡合,此时转动柱9由于重锤的重力作用,自动在连接架13处发生转动,并带动外部机芯报时。
28.当转动柱9带动拉绳10收卷时,拉绳10带动感应块11回收,当感应块11到达金属传感器12的感应范围内部时,金属传感器12 感应到感应块11并将信号转化为电信号,使伺服电机2和电磁铁关 5闭,提高了装置在需要关闭时的灵敏性。
29.实施例2
30.参照图3,一种用于重锤式机械钟机芯的自动拉锤装置,本实施例相较于实施例1,为了提高装置卡杆与齿槽之间的摩擦力,卡杆8 外部粘接有橡胶层16,当卡杆8与齿槽14相互卡合时,卡杆8外部的橡胶层16增大了齿槽14之间的摩擦力,从而提高了卡杆8与齿槽 14之间卡合时的稳定性。
31.工作原理:当需要拉动重锤时,首先控制盒15内部的控制模块带动电磁铁5与伺服电机2通电,此时电磁铁5具有磁性并吸附磁板 7,磁板7带动卡杆8穿过固定架1的圆形开口,随着伺服电机2带动连接环4转动,卡杆一8端插入插入连接环4的齿槽14内部,此时伺服电机2带动转动杆3和转动柱9一起转动,转动柱9带动拉绳 10收卷在转动柱9的外部,当将重锤提拉完毕后,断开伺服电机2 和电磁铁5的电路,此时由于弹簧条6的弹性作用,磁板7自动回位,卡杆8不再与齿槽14相互卡合,此时转动柱9由于重锤的重力作用,自动在连接架13处发生转动,并带动外部机芯报时。
32.当转动柱9带动拉绳10收卷时,拉绳10带动感应块11回收,当感应块11到达金属传感器12的感应范围内部时,金属传感器12 感应到感应块11并将信号转化为电信号,使伺服电机2和电磁铁关 5闭,提高了装置在需要关闭时的灵敏性。
33.当卡杆8与齿槽14相互卡合时,卡杆8外部的橡胶层16增大了齿槽14之间的摩擦力,从而提高了卡杆8与齿槽14之间卡合时的稳定性。
34.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。