1.本发明涉及一种用于旋转谐振器机构的柔性引导件组件。本发明还涉及设有这种柔性引导件组件的时计机芯。
2.发明背景目前大多数机械表配备有摆轮/摆轮游丝和瑞士叉瓦式擒纵机构。摆轮/摆轮游丝形成表的时基。其也被称为谐振器。
3.另一方面,擒纵机构执行两个主要功能:-维持谐振器的往复运动;-计数这些往复运动。
4.瑞士叉瓦式擒纵机构具有低能量效率(约30%)。这种低效率源自于以下事实:擒纵机构的移动是不平稳的,为适应加工误差而存在所损失的“下落”或行程;以及源自于以下事实:若干部件经由相互摩擦的倾斜面传递它们的运动。
5.制造机械谐振器需要惯性元件、引导件和弹性返回元件。通常,摆轮游丝充当由摆轮构成的惯性元件的弹性返回元件。该摆轮由枢轴引导旋转,枢轴在光滑的红宝石轴承中旋转。这引起了摩擦,并因此引起能量损失和操作中的干扰,这些取决于位置并且需要将其消除。
6.还有已知的谐振器的实施例,其包括具有柔性叶片的引导件作为一个或多个惯性元件的弹性返回装置。具有虚拟枢轴的柔性引导件能够显著提高时计谐振器的效率。最简单的是具有交叉叶片的引导件,由两个交叉的直的、通常垂直的叶片组成。然而,也有带有rcc(remote center compliance,远中心柔顺)型的非交叉叶片的引导件,其具有不交叉的直叶片。这种谐振器在欧洲专利第2911012号或欧洲专利第14199039号和第16155039号中有描述。
7.柔性引导件的使用使得可以更换摆轮的枢轴及其摆轮游丝。这具有消除枢轴摩擦、从而增加谐振器的品质因数的优点。然而,已知柔性引导件具有小的角度行程(与摆轮游丝的300
°
相比,大约在10
°
到20
°
之间)。需要大的角度行程来确保许多机械擒纵机构的正常运行。
8.为了解决这个问题,例如在美国专利第2018319517号、美国专利第2019120287号或欧洲专利第3451072号中,已经设想将具有柔性叶片的若干引导件串联放置。因此,获得了大得多的角度行程。将若干引导件串联放置的优点是每个引导件具有小的旋转幅度,这使得可以获得良好的等时性和良好的引导。
9.然而,仍然存在一些缺点,特别是缺乏对引导件的不期望运动的控制,或者特别是重力对柔性引导件的影响,这种影响仍然是显著的。
技术实现要素:
10.因此,本发明的目的是提出一种用于旋转谐振器机构的柔性引导件,其避免了上述问题。
11.为此,本发明涉及一种柔性引导件组件,其用于旋转谐振器机构,尤其用于时计机芯,该组件包括固定支撑件和两个柔性引导件,两个柔性引导件在基本相同的平面中或在两个不同的平行平面中延伸,这两个柔性引导件串联布置,第一柔性引导件包括:相对于固定支撑件可移动的第一元件;第一对柔性叶片,其连接到第一可移动元件,使得通过以围绕第一旋转中心的圆周运动弯曲第一对中的叶片,第一可移动元件能够移动,第二柔性引导件包括:相对于第一可移动元件和固定支撑件可移动的第二元件;第二对柔性叶片,其将第二可移动元件连接到第一可移动元件,使得通过以围绕第二旋转中心的圆周运动弯曲第二对中的叶片,第二可移动元件能够相对于第一可移动元件和固定支撑件移动。
12.柔性引导件组件的特征在于,第一旋转中心和第二旋转中心以第一预先限定的距离偏置,第一预先限定的距离属于组件的平面。
13.作为本发明的结果,获得了一种具有柔性叶片的引导件组件,该柔性叶片具有足够的角度行程、具有对不希望的运动的更精确的控制、以及使重力对谐振器操作的影响最小化。
14.实际上,通过调节柔性引导件之间的偏置,可以选择柔性引导件组件的不希望的运动,以使它们更容易被控制。此外,由于柔性引导件不具有相同的布置,这种偏置使重力的影响最小化。
15.根据有利的实施例,第一对叶片中的叶片是交叉的。
16.根据有利的实施例,第一对叶片中的叶片是不交叉的。
17.根据有利的实施例,第二对叶片中的叶片是交叉的。
18.根据有利的实施例,第二对叶片中的叶片是不交叉的。
19.根据有利的实施例,该组件包括串联布置在第二柔性引导件下游的第三柔性引导件,该第三柔性引导件包括第三可移动元件和将第三可移动元件连接到第二可移动元件的第三对柔性叶片,使得通过以围绕第三旋转中心的圆周运动弯曲第三对中的叶片,第三可移动元件能够相对于第二可移动元件、第一可移动元件和固定支撑件移动。
20.根据有利的实施例,第三旋转中心相对于第二旋转中心以第二预先限定的距离偏置,该第二预先限定的距离属于组件的平面。
21.根据有利的实施例,第三对叶片中的叶片是交叉的。
22.根据有利的实施例,第三对叶片中的叶片是不交叉的。
23.根据有利的实施例,该组件包括串联布置的第四柔性引导件,该第四柔性引导件包括第四可移动元件和将第四可移动元件连接到第三可移动元件或支撑件的第四对柔性叶片,使得通过以围绕第四旋转中心的圆周运动弯曲第四对叶片中的叶片,第四可移动元件能够相对于第三可移动元件、第二可移动元件、第一可移动元件和支撑件移动。
24.根据有利的实施例,第四旋转中心相对于第三旋转中心以第三预先限定的距离偏置,该第三预先限定的距离属于组件的平面。
25.根据有利的实施例,第四对叶片中的叶片是交叉的。
26.根据有利的实施例,第四对叶片中的叶片是不交叉的。
27.根据有利的实施例,在组件的静止位置中,组件相对于纵向线和/或横向线对称。
28.根据有利的实施例,第一对柔性叶片连接到固定支撑件。
29.根据有利的实施例,在组件的静止位置中,柔性引导件的旋转中心布置在直线上,
谐振器的质心优选也布置在所述直线上。
30.根据有利的实施例,每个柔性引导件的刚度根据以下等式选择:对于属于值的集合{1,
…
,n-1}的n的每个值,其中n是柔性引导件的数量,并且kj和ki是引导件j和引导件i的刚度,且ri是柔性引导件i和柔性引导件i-1的旋转中心之间的偏置。
31.根据有利的实施例,柔性引导件是相同的,并且遵循以下等式:对于属于值的集合{1,
…
,n-1}的n的每个值,其中n是柔性引导件的数量,并且r
n 1
是最后一个柔性引导件的最后一个旋转中心和质心(m)之间的距离。
32.根据有利的实施例,柔性引导件遵循以下等式:其中,,n是柔性引导件的数量。数字k的值是根据枢轴的数量并遵循帕斯卡三角形的规则选择的。
33.本发明还涉及一种用于时计机芯的旋转谐振器机构,该机构包括摆轮锤和根据本发明的柔性引导件组件。
附图说明
34.本发明的其他特征和优点将在阅读了参考附图仅以非限制性示例的方式给出的若干实施例的描述后显现出来,其中:
‑ꢀ
图1示意性地示出了根据本发明的柔性引导件组件的柔性引导件的第一布置。
35.‑ꢀ
图2示意性地示出了根据本发明的柔性引导件组件的柔性引导件的第二布置,
‑ꢀ
图3示意性地表示了根据本发明的柔性引导件组件的柔性引导件的第三布置,
‑ꢀ
图4示意性地示出了根据第一实施例的柔性引导件组件,
‑ꢀ
图5示意性地示出了根据本发明第二实施例的柔性引导件组件,
‑ꢀ
图6示意性地示出了根据本发明第三实施例的柔性引导件组件,
‑ꢀ
图7示意性地示出了根据本发明第四实施例的柔性引导件组件,
‑ꢀ
图8示意性地示出了根据本发明第五实施例的柔性引导件组件,
‑ꢀ
图9示意性地示出了根据本发明第六实施例的柔性引导件组件,
‑ꢀ
图10示意性地示出了根据本发明第七实施例的柔性引导件组件,
‑ꢀ
图11示意性地示出了根据本发明第八实施例的柔性引导件组件,
‑ꢀ
图12示意性地示出了根据本发明第九实施例的柔性引导件组件,
‑ꢀ
图13示意性地示出了根据本发明第十实施例的柔性引导件组件,并且
‑ꢀ
图14示意性地示出了根据本发明第十一实施例的柔性引导件组件。
具体实施方式
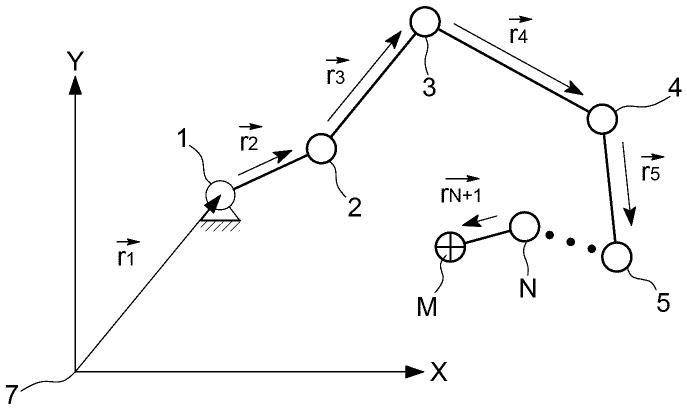
36.图1表示柔性引导件的多个旋转中心的理论布置,每个柔性引导件具有旋转中心1、2、3、4、5、
…ꢀ
n,柔性引导件围绕该旋转中心旋转。柔性引导件串联布置在不同的位置中,使得在组件的静止位置中,每个柔性引导件的旋转中心1、2、3、4、5、
…ꢀ
n自彼此偏置。静止位置对应于柔性引导件没有运动,所有引导件都处于平衡位置。换言之,没有一个旋转中心与另一个旋转中心的位置相同。除了相对于参考标记的原点确定的第一柔性引导件1之外,每个旋转中心相对于串联系列中的前一个柔性引导件的旋转中心具有限定的位置。柔性引导件的每个旋转中心相对于前一个柔性引导件的旋转中心偏置。因此,第二柔性引导件2的旋转中心相对于第一柔性引导件1的旋转中心以距离偏置,第三柔性引导件3的旋转中心相对于第二柔性引导件2的旋转中心以距离偏置,以此类推,直到最后一个柔性引导件n。取决于柔性引导件的布置,组件具有质心m,其布置在距最后一个柔性引导件n距离 处。在附图中,所有的旋转中心相对于彼此偏置,但是在不同的实施例中,一些旋转中心可以重叠。
37.当将两个枢轴彼此组装成使得后一个枢轴的可移动元件可经由连接到前一个枢轴的可移动元件的装置而旋转移动时,这两个枢轴被称为是串联的。优选地,如图2所示,柔性引导件被布置成使得所有柔性引导件的旋转中心被布置在同一直线6上。因此,每个柔性引导件的旋转中心1、2、3、4、5、
…ꢀ
n在同一条线上相对于彼此以预先限定的距离偏置。组件的引导件的这种布置使得可以减小重力对组件的影响。事实上,重心的移动小于图1的一般情况。
38.在一个特定的情况下,柔性引导件根据以下等式布置:其中,n是属于组件的柔性引导件的数量,kj是引导件j的刚度,且ri是柔性引导件i和柔性引导件i-1的旋转中心之间的偏置距离。
39.距离r1是引导件1的旋转中心和组件的固定支撑件7之间的距离。组件的引导件的这种布置进一步减小了重力对组件的影响,因为重心的移动甚至更小。
40.在所有柔性引导件具有相同刚度k的特定情况下,等式变为:
其中,n是属于组件的柔性引导件的数量,且r
n 1
是最后一个柔性引导件的最后一个旋转中心和质心(m)之间的距离。组件的引导件的这种布置降低了组件的制造成本,因为引导件是相同的,且因此更容易被制造。
41.在一种变型中,引导件是相同的,但具有不同的刚度,或者它们是不同的,但具有相同的刚度。在这些情况下,根据以下二项式等式选择柔性引导件:其中,,n是柔性引导件的数量,r
k 1
是柔性引导件k 1和柔性引导件k的旋转中心之间的偏置距离。数字k的值是根据引导件的数量并遵循帕斯卡三角形的规则选择的。帕斯卡三角形有以下形式:。
42.在两个柔性引导件的组件的情况下,选择第三行的系数k。对于三个引导件的组件,选择第四行的系数k。对于四个引导件的组件,选择第五行的系数k,对于额外的引导件,则以此类推。最后一个数字对应于组件质心的偏置量。当系数具有负号时,在直线6上,偏置是沿着与系数k为正值的偏置相反的方向。
43.例如,在图3中,对于四个柔性引导件的组件,第一引导件的第一旋转中心1被布置于在直线6上距支撑件7距离x处,系数为1。第二引导件的第二旋转中心2在直线6上自第一旋转中心1以距离-4x偏置。第三引导件的第三旋转中心3在直线6上自第二旋转中心2以距离6x偏置。第四引导件的第四旋转中心4在直线6上自第三旋转中心3以距离-4x偏置。最后,该组件被配置成使得该组件的质心m被布置于在直线6上距第四旋转中心4距离x处。
44.组件的引导件的这种布置进一步减小了重力对组件的影响,因为重心的移动小于前述变型。
45.图4至14的组件的实施例包括柔性引导件,其旋转中心布置在同一条线上。
46.图4和图5示出了串联组装的两个柔性引导件的组件的第一实施例10和第二实施例20。组件10、20包括支撑件11、21和两个柔性引导件,每个柔性引导件基本上布置在一个平面内。支撑件11、21具有相对于组件10、20横向布置的细长矩形板的形状。
47.第一柔性引导件包括相对于支撑件11、21可移动的第一元件13、23,以及将支撑件11、21连接到第一可移动元件13、23的第一对柔性叶片12、22。因此,通过以围绕第一旋转中心17、27的圆周运动弯曲第一对中的叶片12、22,第一可移动元件13、23能够相对于支撑件11、21移动。第一可移动元件13、23具有形成矩形的管状形状,矩形的长边14、24相对于其他边加高,使得其处于第二柔性引导件的平面内。在组件的静止位置中,矩形横向布置,基本
平行于支撑件11、21。
48.第二柔性引导件包括相对于第一可移动元件13、23可移动的第二元件16、26,以及将第二可移动元件16、26连接到第一可移动元件13、23的第二对柔性叶片15、25。因此,通过以围绕第二旋转中心18、28的圆周运动弯曲第二对中的叶片15、25,第二可移动元件16、26能够相对于第一可移动元件13、23移动。在组件10、20的静止位置中,第二可移动元件16、26具有横向布置的细长矩形板的形状,基本平行于支撑件11、21和第一可移动元件13、23。
49.同一对中的柔性叶片12、15、22、25交叉并在它们的交叉点处焊接。同一对中的叶片在同一侧连结到支撑件11、21或可移动元件13、16、26、23。第二对中的叶片15、25在第一可移动元件13、23的相同加高侧14、24上连结。在图4的组件10的第一实施例中,两个柔性引导件一个接一个地延伸,而在图5的组件20的第二实施例中,两个柔性引导件大部分重叠,第二柔性引导件相对于第一实施例10在第一引导件上方沿另一方向定向。
50.根据本发明,对于两个实施例,第一旋转中心17、27和第二旋转中心18、28以第一预先限定的距离偏置。在组件10、20的静止位置中,旋转中心基本上布置在每个柔性引导件的成对叶片12、15、22、25的交叉点处。在第一实施例10中,该距离大于第二实施例20中的距离。
51.图6的第三实施例是第二实施例的变型,其中两对交叉叶片32、35没有在它们的交叉点处连结。此外,第一可移动元件33具有矩形形状,设置有加高部分34,以便位于第二柔性引导件的平面内。这两个引导件主要是重叠的,具有偏置,以便以第一预先限定的距离将两个旋转中心37、38分开。组件30的支撑件31和第二可移动元件36几乎重叠。
52.图7示出了组件40的第四实施例,该组件包括支撑件41和串联布置的四个柔性引导件。引导件布置在基本相同的平面上。支撑件41具有相对于组件40横向布置的细长矩形板的形状。
53.第一柔性引导件包括相对于支撑件41可移动的第一元件43、将支撑件41连接到第一可移动元件43的第一对柔性叶片42。因此,通过以围绕第一旋转中心47的圆周运动弯曲第一对中的叶片42,第一可移动元件43能够相对于支撑件41移动。第一可移动元件43呈圆弧形状,其弯曲部朝向支撑件41。
54.第二柔性引导件包括相对于第一可移动元件43可移动的第二元件46,以及将第二可移动元件46连接到第一可移动元件43的第二对柔性叶片45。因此,通过以围绕第二旋转中心48的圆周运动弯曲第二对中的叶片45,第二可移动元件46能够相对于第一可移动元件43移动。第二可移动元件46具有h的形状,其中心部段39是细长的。
55.根据本发明,第一旋转中心47和第二旋转中心48以第一预先限定的距离偏置。旋转中心47、48基本上布置在处于静止位置中的每个柔性引导件的叶片的共线的交叉点处。
56.组件40包括串联布置在第二柔性引导件下游的第三柔性引导件。第三柔性引导件包括第三可移动元件51和将第三可移动元件51连接到第二可移动元件46的第三对柔性叶片49。因此,通过以围绕第三旋转中心的圆周运动弯曲第三对中的叶片49,第三可移动元件51能够相对于第二可移动元件46移动。第三旋转中心与第二旋转中心48在基本相同的位置。第三可移动元件51呈圆弧形状,该圆弧相对于位于组件40中间的h形主体的部段39对称于第一可移动元件43的另一圆弧布置。这两个弧布置在h中,在部段39的两侧。
57.该组件包括串联布置在第三柔性引导件下游的第四柔性引导件,第四柔性引导件包括第四可移动元件53和将第四可移动元件53连接到第三可移动元件51的第四对柔性叶片52。因此,通过以围绕第四旋转中心44的圆周运动弯曲第四对中的叶片52,第四可移动元件53能够相对于第三可移动元件51移动。第四旋转中心44相对于第二和第三旋转中心48以第二预先限定的距离偏置,该第二预先限定的距离基本上等于第一距离。在组件40的静止位置中,第四可移动元件53具有平行于支撑件41布置的细长矩形板的形状。第三可移动元件51的弧的弯曲部朝向第四可移动元件53。支撑件41和第四可移动元件53布置在h的外侧,在每个弧的后面。
58.四个柔性引导件具有不交叉的叶片。同一对叶片中的叶片42、45、49、52布置在支撑件41和/或相应的可移动元件43、46、51、53的同一侧。两个柔性引导件成对对称地布置。因此,柔性引导件组件40在静止位置中相对于纵向线和横向线对称,这两条线基本垂直。
59.在图8的第五实施例中,组件50包括支撑件61和串联布置的三个柔性引导件,每个引导件基本上布置在同一平面内。支撑件61具有细长矩形板的形状,该矩形板设置有突起,叶片在该突起上连结。
60.第一柔性引导件包括相对于支撑件61可移动的第一元件63、将支撑件61连接到第一可移动元件63的第一对柔性叶片62。因此,通过以围绕第一旋转中心57的圆周运动弯曲第一对中的叶片62,第一可移动元件63能够相对于支撑件61移动。第一可移动元件63是u形的。
61.第二柔性引导件包括相对于第一可移动元件63可移动的第二元件66,以及将第二可移动元件66连接到第一可移动元件63的第二对柔性叶片65。因此,通过以围绕第二旋转中心58的圆周运动弯曲第二对中的叶片65,第二可移动元件66能够相对于第一可移动元件63移动。第二可移动元件66是u形的。
62.该组件包括串联布置在第二柔性引导件下游的第三柔性引导件。第三柔性引导件包括相对于第二可移动元件66可移动的第三元件67,以及将第三可移动元件67连接到第二可移动元件66的第三对柔性叶片59。因此,通过以围绕第三旋转中心54的圆周运动弯曲第三对中的叶片59,第三可移动元件67能够相对于第二可移动元件66移动。第三可移动元件67具有细长矩形板的形状,该矩形板设置有突起,叶片在突起上连结。第三旋转中心54相对于第二旋转中心58以第二预先限定的距离偏置,该第二预先限定的距离基本上等于第一距离。
63.第一和第三柔性引导件具有不交叉的柔性叶片。第二柔性引导件具有交叉的柔性叶片,这些叶片在其交叉点处连结。两个“u”形相互面对,使得一个“u”的内部面对另一个“u”的内部。两个u形通过形成“x”的第二对叶片65彼此连结,叶片的端部组装到u形的内部。支撑件61和第三可移动元件67各自布置在u内,突起指向u的外侧。第一对叶片62和第三对叶片59在第二对叶片58之后连结到u的内侧。
64.在静止位置中,柔性引导件组件相对于纵向线和横向线对称,这两条线基本垂直。
65.图9的第六实施例示出了组件60,其包括支撑件71和串联布置在一个平面中的两个柔性引导件。支撑件71具有相对于组件60横向布置的细长矩形板的形状。
66.第一柔性引导件包括相对于支撑件71可移动的第一元件73、将支撑件71连接到第一可移动元件73的第一对柔性叶片72。因此,通过以围绕第一旋转中心77的圆周运动弯曲
第一对中的叶片72,第一可移动元件73能够相对于支撑件71移动。第一可移动元件73是u形的,u的内侧横向地面对支撑件。
67.第二柔性引导件包括相对于第一可移动元件73可移动的第二元件76,以及将第二可移动元件76连接到第一可移动元件76的第二对柔性叶片75。因此,通过以围绕第二旋转中心78的圆周运动弯曲第二对中的叶片75,第二可移动元件76能够相对于第一可移动元件73移动。第二可移动元件76具有细长矩形板的形状,该矩形板设置有突起,叶片在该突起上连结。
68.根据本发明,第一旋转中心77和第二旋转中心78以第一预先限定的距离偏置。旋转中心77、78基本上布置在处于静止位置中的每个柔性引导件的叶片的共线的交叉点处。因此,第一旋转中心77形成在交叉点处,而第二旋转中心形成在第二可移动元件76的突起处。
69.第一柔性引导件具有交叉的柔性叶片,这些叶片在其交叉点处连结。第二柔性引导件具有不交叉的柔性叶片。
70.支撑件和u通过形成x的第二对叶片75彼此连接,叶片的端部一方面组装到u形的内部,另一方面组装到矩形板的侧面。第二可移动元件76布置在u的内部,突起面向u的外部。第一对叶片72和第二对叶片75连结到u形的内部。
71.在图10的第七实施例中,组件70是图9的第五实施例的变型,其中第二对中的柔性叶片85交叉,第二可移动元件86垂直于支撑件81布置在第一可移动元件83的u的内部。第一对叶片82的第一旋转中心87相对于第二旋转中心88偏置。
72.在图11中,组件80的第八实施例包括支撑件91和串联布置在基本相同的平面中的三个柔性引导件。支撑件91具有相对于组件80横向布置的细长矩形板的形状。
73.第一柔性引导件包括相对于支撑件91可移动的第一元件93、将支撑件91连接到第一可移动元件93的第一对柔性叶片92。因此,通过以围绕第一旋转中心97的圆周运动弯曲第一对中的叶片92,第一可移动元件93可以相对于支撑件91移动。第一可移动元件93具有带有弯曲端部的w形。
74.第二柔性引导件包括相对于第一可移动元件93可移动的第二元件96,以及将第二可移动元件96连接到第一可移动元件93的第二对柔性叶片95。因此,通过以围绕第二旋转中心98的圆周运动弯曲第二对中的叶片95,第二可移动元件96能够相对于第一可移动元件93移动。第二可移动元件96也是带有弯曲端部的w形,该w以倒置位置基本平行于第一可移动元件93布置。
75.w形的底部相互面对。两个w形通过形成x的第二对叶片95彼此连结,叶片的端部被组装到w形的弯曲端部。第一对叶片和第三对叶片连结在w的内尖端上。
76.该组件包括串联布置在第二柔性引导件下游的第三柔性引导件。第三柔性引导件包括相对于第二可移动元件96可移动的第三元件89,以及将第三可移动元件89连接到第二可移动元件96的第三对柔性叶片99。因此,通过以围绕第三旋转中心94的圆周运动弯曲第三对中的叶片99,第三可移动元件89能够相对于第二可移动元件96移动。第三可移动元件89具有基本平行于第一可移动元件93且平行于w形布置的细长矩形板的形状。
77.第一和第三柔性引导件具有不交叉的成对柔性叶片92、99。第二柔性引导件具有一对交叉的柔性叶片95,所述柔性叶片在它们的交叉点处连结。同一对叶片中的叶片布置
在支撑件和/或可移动元件的同一侧。第二对叶片中的叶片95连结到每个w的弯曲端部。
78.根据本发明,第一旋转中心97和第二旋转中心98以第一预先限定的距离偏置。第三旋转中心94也相对于第二旋转中心98以第二预先限定的距离偏置。旋转中心97、98基本上布置在处于静止位置中的每个柔性引导件的每对叶片92、95、99的共线的交叉点处。因此,第二旋转中心97形成在交叉点处,而第一旋转中心98和第三旋转中心94形成在w形的内尖端处。
79.在静止位置中,柔性引导件组件80相对于纵向线和横向线对称,这两条线基本垂直。
80.在图12的第九实施例中,组件90包括支撑件101和串联布置在基本相同的平面中的三个柔性引导件。支撑件101具有相对于组件90横向布置的细长矩形板的形状。
81.第一柔性引导件包括相对于支撑件101可移动的第一元件103、将支撑件101连接到第一可移动元件103的第一对柔性叶片103。因此,通过以围绕第一旋转中心107的圆周运动弯曲第一对中的叶片102,第一可移动元件103能够相对于支撑件101移动。第一可移动元件103具有三角形的形状,其一个顶点具有圆形突起。
82.第二柔性引导件包括相对于第一可移动元件103可移动的第二元件106,以及将第二可移动元件106连接到第一可移动元件103的第二对柔性叶片105。因此,通过以围绕第二旋转中心108的圆周运动弯曲第二对中的叶片105,第二可移动元件106能够相对于第一可移动元件103移动。第二可移动元件103具有三角形的形状,其一个顶点具有圆形突起。突起的作用是抓住未交叉的叶片。
83.组件90包括串联布置在第二柔性引导件下游的第三柔性引导件。第三柔性引导件包括相对于第二可移动元件106可移动的第三元件110,以及将第三可移动元件110连接到第二可移动元件106的第三对柔性叶片109。因此,通过以围绕第三旋转中心104的圆周运动弯曲第三对中的叶片109,第三可移动元件110能够相对于第二可移动元件106移动。第三可移动元件110具有基本平行于支撑件101布置的细长矩形板的形状。
84.叶片中的同一对叶片布置在支撑件和/或可移动元件的同一侧。第一对柔性叶片102和第三对柔性叶片109没有交叉。第二对柔性叶片102中的柔性叶片是交叉的。
85.两个三角形布置在支撑件101和第三可移动元件110之间,突起面向第二可移动元件103和第三可移动元件106。第一对叶片102和第三对叶片109连结到突起上,而第二对中的叶片105连结到三角形的底部。
86.在静止位置中,柔性引导件组件90相对于纵向线和横向线对称,这两条线基本垂直。
87.根据本发明,第一旋转中心107和第二旋转中心108以第一预先限定的距离偏置。这些旋转中心基本上布置在处于静止位置中的每个柔性引导件的每对中的叶片102、105、109的共线的交叉点处。此外,第三旋转中心104也相对于第二旋转中心98以第二预先限定的距离偏置。
88.在图14中,根据本发明的组件100的第十实施例包括支撑件111和串联布置的四个柔性引导件。第一和第二引导件布置在第一平面中,而第三和第四引导件布置在基本平行于第一平面的第二平面中。支撑件具有相对于引导件100横向布置的细长矩形板的形状。
89.第一柔性引导件包括相对于支撑件111可移动的第一元件113,以及将支撑件111
连接到第一可移动元件113的第一对柔性叶片112。因此,通过以围绕第一旋转中心117的圆周运动弯曲第一对中的叶片112,第一可移动元件113能够相对于支撑件111移动。第一可移动元件113具有大致方形板的形状。
90.第二柔性引导件包括相对于第一可移动元件113可移动的第二元件116,以及将第二可移动元件116连接到第一可移动元件113的第二对柔性叶片115。因此,通过以围绕第二旋转中心118的圆周运动弯曲第二对中的叶片115,第二可移动元件116能够相对于第一可移动元件113移动。第二可移动元件116具有矩形形式的管状结构,在组件100的静止位置中,其界定组件100的长度和宽度。
91.组件100包括串联布置在第二柔性引导件下游的第三柔性引导件。第三柔性引导件包括相对于第二可移动元件116可移动的第三元件120,以及将第三可移动元件120连接到第二可移动元件116的第三对柔性叶片119。因此,通过以围绕第三旋转中心123的圆周运动弯曲第三对中的叶片119,第三可移动元件120能够相对于第二可移动元件116移动。第三可移动元件120具有方形形式的管状结构,其尺寸小于第二可移动元件116的矩形。
92.该组件包括串联布置在第三柔性引导件下游的第四柔性引导件,第四柔性引导件包括第四可移动元件122和将第四可移动元件122连接到第三可移动元件120的第四对柔性叶片121。因此,通过以围绕第四旋转中心124的圆周运动弯曲第四对中的叶片121,第四可移动元件122能够相对于第三可移动元件120移动。在组件100的静止位置中,第四可移动元件122具有相对于支撑件100横向布置的细长矩形板的形状。
93.根据本发明,在第一平面中,第一旋转中心117和第二旋转中心118以第一预先限定的距离偏置。在第二平面中,第三旋转中心123相对于第二旋转中心118以第二预先限定的距离偏置。在第二平面中,第四旋转中心124相对于第三旋转中心123以第三预先限定的距离偏置。在组件100的静止位置中,旋转中心117、118、123、124基本上布置在每对柔性叶片中的叶片的共线的交叉点处。
94.同一对叶片中的叶片布置在支撑件和/或可移动元件的同一侧。两个柔性引导件成对地对称布置。因此,柔性引导件组件100在静止位置中相对于纵向线和横向线对称,这两条线基本垂直。
95.本发明还涉及图中未示出的旋转时计谐振器机构。谐振器机构设置有摆轮锤和例如上述实施例之一的柔性引导件组件。摆轮锤例如是环形摆轮或骨形构件,其被串联组装在该组件中的最后一个可移动元件上。
96.图14示出了组件110的第四实施例,该组件包括支撑件131和串联布置的四个柔性引导件。引导件布置在基本相同的平面上。支撑件131具有相对于组件110横向布置的细长矩形板的形状。
97.第一柔性引导件包括相对于支撑件131可移动的第一元件133、连接到第一可移动元件133的第一对柔性叶片132。因此,通过以围绕第一旋转中心137的圆周运动弯曲第一对中的叶片132,第一可移动元件133可以移动。第一可移动元件113具有h形,其中心部段139是细长的。
98.第二柔性引导件包括相对于第一可移动元件133可移动的第二元件136,以及将第二可移动元件136连接到第一可移动元件133的第二对柔性叶片135。因此,通过以围绕第二旋转中心138的圆周运动弯曲第二对中的叶片135,第二可移动元件136能够相对于第一可
移动元件133移动。第二可移动元件136呈圆弧形状,其弯曲部不面向支撑件131。
99.根据本发明,第一旋转中心137和第二旋转中心138以第一预先限定的距离偏置。旋转中心137、138基本上布置在处于静止位置中的每个柔性引导件的叶片的共线的交叉点处。
100.组件110包括串联布置在第二柔性引导件下游的第三柔性引导件。第三柔性引导件包括第三可移动元件141和将第三可移动元件141连接到第二可移动元件136的第三对柔性叶片139。因此,通过以围绕第三旋转中心的圆周运动弯曲第三对中的叶片139,第三可移动元件141能够相对于第二可移动元件136移动。第三旋转中心与第二旋转中心138在基本相同的位置。在组件40的静止位置中,第三可移动元件141具有平行于支撑件131布置的细长矩形板的形状。第二可移动元件136的弧的弯曲部朝向第三可移动元件141。支撑件131和第三可移动元件141布置在h的外侧,在每个弧之后。
101.该组件包括串联布置在第一柔性引导件上游的第四柔性引导件,第四柔性引导件包括第四可移动元件143和将第四可移动元件143连接到支撑件131的第四对柔性叶片142。因此,通过以围绕第四旋转中心的圆周运动弯曲第四对中的叶片142,第四可移动元件143可以相对于支撑件131移动。第四旋转中心基本上与第一旋转中心137在同一位置。第一对叶片中的叶片132将第四可移动元件143连接到第一可移动元件133,以允许第一可移动元件133通过围绕第一旋转中心137以圆周运动弯曲第一对叶片中的叶片132而相对于第四可移动元件143移动。第四可移动元件143呈圆弧形状,其弯曲部朝向支撑件131。第四可移动元件143相对于位于组件110中间的h形主体的部段139对称于第二可移动元件136的另一圆弧布置。这两个弧布置在h中,在部段139的两侧。
102.四个柔性引导件具有不交叉的叶片。同一对叶片中的叶片132、135、139、142布置在支撑件131和/或相应的可移动元件133、136、141、143的同一侧。两个柔性引导件成对地对称布置。因此,柔性引导件组件110在静止位置中相对于纵向线和横向线对称,这两条线基本垂直。
103.自然地,本发明不限于参考附图描述的实施例,并且在不脱离本发明的范围的情况下可以设想变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。