1.本技术涉及包装设备的技术领域,尤其是涉及一种全自动旋盖机。
背景技术:
2.甲氧虫酰肼是第2代双酰肼类昆虫生长调节剂,对鳞翅目害虫具有高度选择杀虫活性,没有渗透作用及韧皮部内吸活性,主要通过胃毒作用致效,同时也具有一定的触杀及杀卵活性,主要用于防治鳞翅目害虫的幼虫,如甜菜夜蛾、甘蓝夜蛾等。甲氧虫酰肼通常需要与其他杀虫组分进行配制形成灌装的杀虫剂,在进行灌装杀虫剂的加工工艺时需要用到旋盖机。
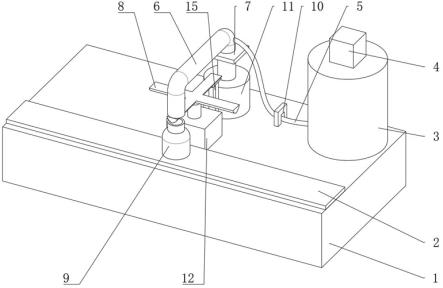
3.相关技术中,参照图1,旋盖机通常包括机架100、安装于机架100的传输带110、位于传输带110两侧的夹紧机构和位于夹紧机构上方的旋盖1机构,夹紧机构包括两块安装板120、安装于其中一块安装板120上的进给气缸130和安装于进给气缸130活塞杆的夹紧板140,旋盖机构包括两个旋盖150,旋盖150通过齿轮170与驱动电机160相连。
4.当需要进行旋盖工作时,待加工瓶体和瓶盖通过传输带进行运输,当瓶体和瓶盖运动至夹紧机构及旋盖下方时,进给气缸的活塞杆推动夹紧板抵紧瓶体实现对瓶体的定位和固定,然后启动驱动电机,驱动电机带动两个旋盖运转,两个旋盖实现对瓶盖在瓶体上的旋紧工作。
5.针对上述中的相关技术,发明人发现在进行瓶盖与瓶体的旋紧工作时,通常需要人工将瓶盖放置在瓶体上并将瓶体和瓶盖放置到传输带上进行运输工作,上述工作过程较为耗费人工精力,难以达到全自动旋盖的目的。
技术实现要素:
6.为了改善人工将瓶盖放置到瓶体上较为耗费人工精力的问题,本技术提供一种全自动旋盖机。
7.本技术提供的一种全自动旋盖机采用如下的技术方案:
8.一种全自动旋盖机,包括机架和安装于所述机架并用于运输瓶体的传输带,所述机架安装有安装台,所述安装台安装有用于运输瓶盖的进料通道,所述进料通道安装有用于阻挡限位瓶盖的第一限位机构,所述机架安装有用于阻挡限位瓶体以便瓶盖与瓶体对位的第二限位机构,所述安装台安装有用于将瓶盖与瓶体初步压紧定位的压紧机构。
9.通过采用上述技术方案,当需要进行瓶盖和瓶体的旋紧工作时,瓶盖通过进料通道进行运输并在第一限位机构的作用下停止运动,瓶体通过传输带进行运输并在第二限位机构的作用下运动至瓶盖下方,然后在压紧机构的作用下,瓶盖被初步压紧定位到瓶体上,以便瓶盖与瓶体进行后续的旋紧工作,无需人工手动将瓶盖初步压紧到瓶体上,降低了进行旋盖工作时的人工精力,一定程度上提高工作人员的工作效率。
10.可选的,所述压紧机构包括安装于所述安装台的压紧气缸和安装于所述压紧气缸的活塞杆处的压紧块,所述压紧块用于抵接瓶盖并将瓶盖初步压紧在瓶体上。
11.通过采用上述技术方案,当瓶盖运动至瓶体上方时,压紧气缸运转,压紧气缸的活塞杆推动压紧块抵接瓶盖,并推动瓶盖压紧在瓶体上方,实现瓶盖与瓶体进行旋紧工作前的初步定位压紧工作。
12.可选的,所述第一限位机构包括安装于所述进料通道的限位架、安装于所述限位架的第一限位板和连接于所述第一限位板的第二限位板,所述第一限位板和所述第二限位板连接处形成有用于抵紧瓶盖的弯折部,所述第二限位板与所述压紧块相连。
13.通过采用上述技术方案,当压紧块在进行瓶盖和瓶体之间的压紧工作时,压紧块带动第二限位板发生进给运动,第二限位板带动第一限位板发生倾斜,从而使得弯折部抵接下一个瓶盖,实现对下一个瓶盖的限位工作;压紧块远离瓶盖后,第二限位板带动第一限位板恢复至原状,弯折部解除对下一个瓶盖的限位工作,下一个瓶盖进一步运动至压紧块下方并进行在瓶体上的初步压紧工作。
14.可选的,所述第二限位机构包括限位块、连接块、转动轴、扭簧和转动组件,所述限位块和连接块固定相连并通过所述转动轴安装于所述机架,所述机架开设有供限位块穿过的开口,所述扭簧套设于所述转动轴,所述转动组件用于与所述连接块抵接并克服所述扭簧扭力以使得所述限位块进入开口。
15.通过采用上述技术方案,初始状态时,由于扭簧扭力的作用限位块伸出开口并抵接瓶体,实现对瓶体的限位作用;转动组件转动后推动连接块发生转动,连接块带动限位块绕转动轴发生转动并带动限位块进入开口内,进而解除对瓶体的限位作用,下一个瓶体运动至指定位置后,转动组件远离连接块,连接块在扭簧扭力的作用下绕转动轴发生转动并带动限位块伸出开口,起到对瓶体的限位作用。
16.可选的,所述转动组件包括伺服电机、安装套和安装杆,所述伺服电机安装于所述机架,所述安装套安装于所述伺服电机的输出轴,所述安装杆固定相连与所述安装套外周壁并在所述伺服电机的驱动下推动所述连接块发生转动。
17.通过采用上述技术方案,当需要解除对瓶体的限位作用时,启动伺服电机,伺服电机的输出轴带动安装套发生转动,安装套带动安装杆发生转动,安装杆发生转动的过程中抵接连接块并推动连接块绕转动轴发生转动,限位块进一步进入开口内,解除对瓶体的限位作用;
18.反之,伺服电机反转,安装套带动安装杆远离连接块,连接块在扭簧扭力的作用下绕转动轴发生转动并带动限位块伸出开口,起到对瓶体的限位作用。
19.可选的,所述机架安装有用于与所述连接块抵接的定位杆,所述安装杆开设有供所述定位杆穿过的弧形槽。
20.通过采用上述技术方案,定位杆的设置,起到对连接块初始位置的定位和限位作用,尽可能避免了由于扭簧的扭力作用导致连接块和限位块偏离限位瓶体的位置;弧形槽的设置,避免了安装杆在推动连接块发生位移时与定位杆之间产生干涉。
21.可选的,所述安装台安装有两块支板,所述进料通道位于两块所述支板之间,两块所述支板之间安装有用于抵接并支撑所述进料通道的支撑杆,所述支撑杆穿过两块所述支板的端部螺纹安装有连接螺母。
22.通过采用上述技术方案,支撑杆通过两个连接螺母的抵紧作用力固定安装在两块支板之间,通过支撑杆来实现连接通道在安装台上的安装固定工作。
23.可选的,所述支板开设有供所述支撑杆发生位移的腰型孔,所述连接螺母用于抵紧所述支板并固定所述支撑杆在所述腰型孔内的位置。
24.通过采用上述技术方案,支板上腰型孔的设置,使得工作人员可以调节支撑杆在支板上的位置从而来调节连接通道的倾斜角度,实现对瓶盖运输方向和角度的调整。
25.综上所述,本技术包括以下至少一种有益技术效果:
26.1.通过第一限位机构、第二限位机构和压紧机构的设置,使得瓶盖能够被初步压紧定位到瓶体上,以便瓶盖与瓶体进行后续的旋紧工作,无需人工手动将瓶盖初步压紧到瓶体上,降低了进行旋盖工作时的人工精力,一定程度上提高工作人员的工作效率;
27.2.通过支板上腰型孔的设置,使得工作人员可以调节支撑杆在支板上的位置从而来调节连接通道的倾斜角度,实现对瓶盖运输方向和角度的调整。
附图说明
28.图1是相关技术中旋盖机的整体结构示意图;
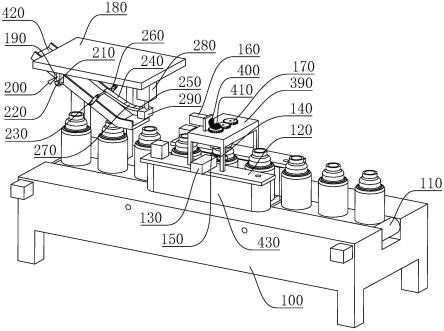
29.图2是本技术实施例中旋盖机的整体结构示意图;
30.图3是图2所示的机架处的剖视结构示意图,示出了第二限位机构处的具体结构。
31.附图标记说明:100、机架;110、传输带;120、安装板;130、进给气缸;140、夹紧板;150、旋盖;160、驱动电机;170、齿轮;180、安装台;190、支板;200、腰型孔;210、支撑杆;220、连接螺母;230、限位架;240、第一限位板;250、第二限位板;260、连接轴;270、弯折部;280、压紧气缸;290、压紧块;300、限位块;310、连接块;320、转动轴;330、安装腔;340、定位杆;350、弧形槽;360、伺服电机;370、安装套;380、安装杆;390、装载台;400、第一锥齿轮;410、第二锥齿轮;420、进料通道;430、传送带。
具体实施方式
32.以下结合附图2-3对本技术作进一步详细说明。
33.本技术实施例公开一种全自动旋盖机。参照图2,全自动旋盖机包括机架100、传输带110、夹紧机构、旋盖机构和进料通道420,传输带110安装于机架100并用于运输瓶体,传输带110设置有两组并分别位于机架100两端;夹紧机构安装于机架100两组传输带110之间的位置,且夹紧机构位于传输带110的两侧并用于旋盖150时夹紧瓶体;旋盖机构安装于夹紧机构上方并用于旋紧瓶盖;进料通道420位于夹紧机构的进料端并用于运输瓶盖。
34.参照图2,机架100的进料端通过立柱固定安装有安装台180,安装台180底面固定安装有两块支板190,两块支板190沿竖直方向均开设有腰型孔200,两块支板190间滑移安装有支撑杆210,支撑杆210的两端分别穿过两块支板190且螺纹连接有连接螺母220,进料通道420的底端开设有支撑杆210配合的通槽,进料通道420呈倾斜设置以便瓶盖发生位移运输。支板190具有一定弹性形变能力,进料通道420通过拧紧两个连接螺母220,连接螺母220进一步抵紧支板190和进料通道420来实现进料通道420的安装固定工作。
35.参照图2,进料通道420较低端安装有用于阻挡限位瓶盖的第一限位机构,第一限位机构包括限位架230、第一限位板240和第二限位板250,限位架230铰接于进料通道420较低端,限位架230远离铰接点的一端固定安装有连接轴260,第一限位板240转动安装于连接轴260上,第二限位板250呈水平设置并与第一限位板240固定相连,第二限位板250与第一
限位板240连接处形成有圆角的弯折部270,弯折部270用于抵紧瓶盖以实现对瓶盖的限位作用。
36.参照图2,安装台180远离支板190的一端底面安装有用于将瓶盖抵紧至瓶体上的压紧机构,压紧机构包括固定安装于安装台180底面的压紧气缸280和固定安装于压紧气缸280的活塞杆处的压紧块290,压紧块290的侧壁与第二限位板250的端部固定相连,压紧块290用于瓶盖与瓶体对位后将瓶盖抵紧到瓶体上实现初步限位。
37.参照图2和图3,机架100位于两组传输带110之间的位置安装有用于阻挡限位瓶体的第二限位机构,第二限位机构包括限位块300、连接块310、转动轴320、扭簧和转动组件,机架100开设有安装腔330,安装腔330顶部开设有供限位块300穿过的开口,限位块300与连接块310固定相连,转动轴320穿过限位块300和连接块310转动连接于机架100,扭簧套设在转动轴320,安装腔330内固定安装有定位杆340,在扭簧扭力的作用下,连接块310位于安装腔330内并与定位杆340抵接,限位块300伸出开口并用于阻挡瓶体。
38.参照图3,转动组件用于与连接块310抵接并克服扭簧扭力以使得限位块300进入开口,进而解除对瓶体的限位,转动组件包括伺服电机360、安装套370和安装杆380,伺服电机360固定安装于安装腔330内,安装套370固定安装于伺服电机360的输出轴,安装杆380固定安装于安装套370的外周壁上,安装杆380上开设有供定位杆340穿过的弧形槽350。安装杆380在伺服电机360的驱动下发生转动,安装杆380转动过程中弧形槽350穿过定位杆340并抵接连接块310,连接块310在安装杆380的推动下发生转动,连接块310带动限位块300绕转动轴320发生转动,限位块300进入开口,解除对瓶体的限位作用。
39.参照图2,夹紧机构包括两块安装板120、固定安装于其中一块安装板120顶端的进给气缸130和安装于进给气缸130活塞杆的夹紧板140,夹紧板140呈弧形并用于与瓶体相抵,两块安装板120上均安装有用于运输瓶体的传送带430。旋盖机构包括两个旋盖150、驱动电机160和齿轮170,安装板120顶面固定安装有装载台390,驱动电机160固定安装于装载台390的顶面,驱动电机160的输出轴安装有第一锥齿轮400,装载台390上转动安装有三根转轴,每根转轴上均固定安装有齿轮170,相邻两个齿轮170相啮合,其中一个端部的齿轮170所在转轴上安装有与驱动电机160输出轴上的第一锥齿轮400啮合的第二锥齿轮410,旋盖150固定安装于位于端部的两根转轴底端。
40.本技术实施例一种全自动旋盖机的实施原理为:
41.初始状态时,限位块300伸出开口,瓶体在传输带110的作用下运输并在限位块300的限位作用下停止运动,当瓶盖运动至瓶体上方时,压紧气缸280运转,压紧气缸280的活塞杆推动压紧块290抵接瓶盖,并推动瓶盖压紧在瓶体上方,同时第二限位板250带动第一限位板240发生倾斜,从而使得弯折部270抵接下一个瓶盖,实现对下一个瓶盖的限位工作,实现瓶盖在瓶体上的初步固定。
42.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。