一种用于svc与电网交互稳定性评估的方法及其应用
技术领域
1.本发明涉及柔性输配电的电力系统建模技术领域,更具体地,涉及一种用于svc与电网交互稳定性评估的方法及其应用。
背景技术:
2.随着我国输配电网规模的不断扩大和各类用电负荷的快速增大,为保证电的电能质量,对系统无功优化和无功补偿的需求也越来越高。静止无功补偿装置作为一种典型的柔性交流输电设备可实现电网无功最优补偿、抑制电压波动、提高系统电压稳定性等优点,在电力系统柔性输配电领域得到广泛应用。然而,静止无功补偿器在运行过程中,将大量谐波电流注入电网中,导致电能质量恶化,甚至会引发系统振荡不稳定现象,因此准确评估静止无功补偿器与电网交互稳定性很有必要。
3.目前作为柔性输配电设备的静止无功补偿器并网研究主要集中于利用其对具有串联电容补偿的电力系统次同步振荡抑制策略,而svc本身的快速响应能力会与电网产生明显耦合作用,导致系统发生振荡问题。而在svc接入电网的稳定性评估问题上,现有研究主要探讨了基于rtds仿真记录存在低频振荡现象,但并未给出具体的理论分析。同时svc的精确模型建立是评估svc与电网交互稳定性前提,而多数文献将静止无功补偿器等效为基频线性化模型,而未能从谐波耦合特性分析svc与电网交互稳定性,忽略了系统内部多次谐波动态特性和谐波耦合作用。有少数相关文献虽然建立了svc的开环dhd模型并验证了该模型在扰动下的阶跃响应,但该模型并涉及到tcr的导通角和锁相环的对模型的影响,且模型也不涉及到控制环节。
技术实现要素:
4.本发明为克服上述现有技术中存在的不足之处,提供一种基于svc与电网交互稳定性的评估方法及其应用,以期能建立考虑导通角、锁相环影响的晶闸管控制电抗器动态谐波域模型,并能建立含静止无功补偿器电力系统的闭环dhd模型,从而能准确地评估svc与电网交互稳定性问题,并提高svc控制系统设计效率,进而能提高输配电网的可靠性。
5.为了实现上述目的,本发明所采用的技术方案如下:
6.本发明一种用于svc与电网交互稳定性评估的方法的特点在于,包括:
7.步骤1、构建考虑导通角、锁相环影响的晶闸管控制电抗器动态谐波域模型;
8.步骤2、针对晶闸管控制电抗器与固定电容器型静止无功补偿器,构建含静止无功补偿器电力系统的动态谐波域模型;
9.步骤3、根据所述动态谐波域模型,确定静止无功补偿器与电网交互稳定性相关的系统状态矩阵;
10.步骤4、计算所述系统状态矩阵的特征值,并利用特征值分析方法对静止无功补偿器与电网交互稳定性进行评估。
11.本发明所述的一种用于svc与电网交互稳定性评估的方法的特点也在于,所述步
骤1包括:
12.步骤1.1利用式(1)和式(2)构建晶闸管控制电抗器的主电路拓扑动态谐波域方程:
[0013][0014][0015]
式(1)和式(2)中,x1表示电抗器电流列向量,表示x1的微分,i
ab
、i
bc
、i
ca
分别为流过所述晶闸管控制电抗器中ab、bc、ca支路电感的电流,u表示晶闸管控制电抗器相电压列向量,va、vb、vc分别为晶闸管控制电抗器中a、b、c相电压,a1、b1为参数矩阵;
[0016]
步骤1.2利用式(3)建立所述晶闸管控制电抗器中三相晶闸管的实际导通角σ的关系式,用于求解精确导通角σ
*
:
[0017][0018]
式(3)中,x表示晶闸管控制电抗器的ab、bc、ca相支路集合,t0为晶闸管控制电抗器的触发角对应时刻,t表示时间,v
x
(t)为晶闸管控制电抗器的支路端电压的时域函数,v
x,k
为k次谐波的端电压向量,表示k次谐波的端电压向量的共轭向量,θ
x
表示ab、bc、ca相支路集合的相位角,且θ
x
=0,-2π/3,2π/3;n为正整数,ω0为基频角频率,e为自然常数,j为虚数单位;
[0019]
步骤1.3利用式(4)确定晶闸管控制电抗器的端电压的锁相环输出相角θv:
[0020][0021]
式(4)中,v
a,1
为晶闸管控制电抗器中a相基频电压分量,angle(
·
)表示对向量求取相位角。
[0022]
所述步骤2包括:
[0023]
步骤2.1将含静止无功补偿器电力系统中的交流电网、变压器及输电线路相应等效为等值电阻rs和等值电感ls,针对晶闸管控制电抗器与固定电容器型静止无功补偿器,以固定电容器c的电压和系统等效电感ls的电流为状态变量,利用式(5)和式(6)构建含静止无功补偿器电力系统中,除晶闸管控制电抗器以外的主电路拓扑动态谐波域方程:
[0024][0025][0026]
式(5)和式(6)中,x2表示等值电感电流列向量,表示x2的微分,ia、ib、ic分别为流过电网a、b、c相等值电感ls的电流,ug表示电网电压列向量,va、vb、vc分别为a相、b相、c相的电网电压,a2、b2为参数矩阵;
[0027]
步骤2.2利用式(7)和式(8)确定静止无功补偿器控制部分的微分代数方程:
[0028][0029][0030]
式(7)和式(8)中:xc表示控制部分状态列向量,表示xc的微分,xv是二阶低通滤波器环节级联的中间输出量,v
rms
为母线电压有效值的标幺值,xb为pi控制中积分输出,uc表示控制部分输入列向量,v
rmsf
为v
rms
滤波后的电压有效值,v
ref
为电压参考值,bn为指令电纳,ac,bc,cc,dc为参数矩阵;
[0031]
步骤2.3将含静止无功补偿器电力系统中主电路拓扑部分和控制部分相结合,从而利用式(9)和式(10)确定定电压控制模式下系统的动态谐波域模型:
[0032][0033][0034]
式(9)和式(10)中:xs表示系统状态列向量,表示xs的微分,us表示系统输入列向量,as,bs,cs,ds为参数矩阵。
[0035]
所述步骤3是利用式(11)获取表征系统稳定性的状态矩阵:
[0036][0037]
式(11)中,a为系统的状态矩阵。
[0038]
所述步骤4包括:
[0039]
根据式(11)推导系统动态谐波域模型的系统状态矩阵,并得到状态矩阵的主导特征值λ1在复平面上的分布情况,从而利用李雅普诺夫准则判断系统稳定性:
[0040]
若λ1实部为负,则表示含静止无功补偿器电力系统为小扰动稳定;
[0041]
若λ1的实部为正值,则表示含静止无功补偿器电力系统为小扰动不稳定;
[0042]
若λ1的实部为0,则表示含静止无功补偿器电力系统为临界稳定。
[0043]
所述步骤1.2中是按如下过程求解所述精确导通角σ
*
:
[0044]
s1.2.1,当晶闸管控制电抗器的触发角为α0时,假设晶闸管开关函数的导通角的初值为σ0=2π-2α0,则推导出开关函数构成的托普利兹矩阵;
[0045]
s1.2.2,根据当前导通角获取的托普利兹矩阵,结合式(12)推导出的三相系统稳态情况下的动态谐波域方程组,计算出三相晶闸管控制电抗器tcr端电压的各次谐波分量;
[0046]
0=a1x1 b1u
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0047]
式(12)中,0表示零矩阵;
[0048]
s1.2.2,利用式(3)得到晶闸管控制电抗器的支路端电压的时域函数v
x
(t),根据晶闸管控制电抗器的端电压在导通时间内积分为零的原理,结合式(3)对时域函数v
x
(t)进行数值积分,得到晶闸管控制电抗器的导通角σ;
[0049]
s1.2.3,将导通角σ代入步骤s1.2.2中进行迭代,直至导通角σ满足收敛标准为止,
获得精确导通角σ
*
。
[0050]
所述步骤2.2中静止无功补偿器的控制部分计算过程如下:
[0051]
步骤2.2.1、根据动态谐波域模型中母线电压基频分量和母线电压有效值的关系,利用式(13)确定母线电压有效值的标幺值v
rms
:
[0052][0053]
式(13)中,v
a,1
、v
a,-1
分别为母线电压va的两个基频电压向量,v
base
为电压基准有效值;
[0054]
步骤2.2.2、采用二阶低通滤波器滤除v
rms
中的谐波分量,并利用式(14)确定滤波后母线电压有效值v
rmsf
:
[0055][0056]
式(14)中,表示xv的微分,表示v
rmsf
的微分,t1、t2为二阶低通滤波器的时间常数;
[0057]
步骤2.2.3、在定交流电压控制方式下,静止无功补偿器的控制部分采用pi控制,从而利用式(15)确定pi控制的计算公式:
[0058][0059]
式(15)中,表示xb的微分,b
t
为输出电纳,k
pv
、k
iv
分别为pi控制的比例和积分系数。
[0060]
本发明一种基于所述的一种用于svc与电网交互稳定性评估的方法的特点是:基于svc与电网交互稳定性评估方法应用于对pi控制参数进行优化:
[0061]
当系统在定交流电压控制模式下稳定运行时,以pi控制的当前比例系数k
pv
和积分系数k
iv
为基准,使k
pv
增加,同时保持k
iv
不变,绘制系统状态矩阵的主导特征值λ2的运动轨迹,然后,使k
iv
增加,同时保持k
pv
不变,绘制系统状态矩阵的主导特征值λ2的运动轨迹,从而根据两种情况下主导特征值λ2的运动轨迹,采用李雅普诺夫准则确定pi控制参数k
pv
和k
iv
的稳定区域,从而实现对pi控制参数优化。
[0062]
与已有技术相比,本发明的有益效果体现在:
[0063]
1本发明提出一种用于分析和量化svc与电网交互稳定性评估的方法,基于动态谐波域方程建立考虑导通角、锁相环模块影响的晶闸管控制电抗器数学模型。该模型考虑了电力电子设备晶闸管控制电抗器中各次谐波耦合作用,且精确地反映出晶闸管控制电抗器的动态特性及各次谐波的暂稳态特性,可直观地从谐波耦合特性诠释svc与电网间产生的不稳定现象。
[0064]
2本发明基于含svc电力系统的动态谐波域模型,采用特征值分析法实现了对svc与电网交互稳定性评估的有效判别和量化,且易于推广至复杂实际系统,为柔性输配电网
系统的稳定性分析提供一种新方法。
[0065]
3本发明分提出了svc与电网交互稳定性评估方法可用于分析控制器参数对系统稳定性的影响,有效提高了控制系统设计效率。
附图说明
[0066]
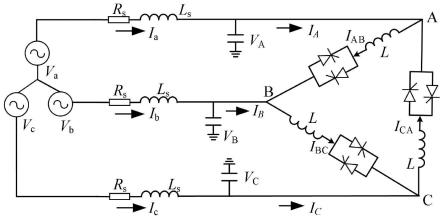
图1为含svc电力系统的等效电路示意图;
[0067]
图2为晶闸管控制电抗器中电抗器瞬时端电压和相电流波形;
[0068]
图3为本发明svc控制器基准pi参数的谐波传递矩阵特征根分布图;
[0069]
图4为本发明控制器参数k
pv
阶跃时v
rmsf
变化曲线;
[0070]
图5为本发明控制器参数k
iv
阶跃时v
rmsf
变化曲线。
具体实施方式
[0071]
本实施例中,以晶闸管控制电抗器和固定电容器型静止无功补偿器作为研究对象,当静止无功补偿器并入电网时,将含svc电力系统简化等效为电源和负载两子系统。图1所示为本发明中三相含svc电力系统的等效电路示意图,其中电网中各参数只考虑三相对称情况。一种用于svc与电网交互稳定性评估的方法是按照以下步骤进行:
[0072]
步骤1、构建考虑导通角、锁相环影响的晶闸管控制电抗器动态谐波域模型;
[0073]
步骤1.1以tcr中a相电抗器电流i
ab
和电容器电压va为状态变量,得:
[0074][0075]
式(1)中,r
l
为电抗器等效电阻,i
ab
为系统线电流,s(t)为开关函数;
[0076]
利用式(2)可得开关函数s(t)的傅里叶展开式:
[0077][0078]
式(2)中,σ为tcr的导通角,为tcr端电压中基频分量的相位角,s(t)由σ,决定。
[0079]
利用式(3)和式(4)构建晶闸管控制电抗器的主电路拓扑动态谐波域方程:
[0080][0081][0082]
式(3)和式(4)中,表示对x1进行微分运算,i
ab
、i
bc
、i
ca
分别为流过tcr中ab、bc、ca支路电感的电流,va、vb、vc分别为tcr中a、b、c相电压,a1、b1为参数矩阵;
[0083]
步骤1.2利用式(5)确定晶闸管控制电抗器中三相晶闸管的实际导通角σ:
[0084][0085]
式(5)中,x表示为晶闸管的ab、bc、ca相支路,t0为晶闸管控制电抗器触发延迟角
对应时刻,v
x
(t)为晶闸管控制电抗器支路端电压时域函数,v
x,k
为k次谐波端电压向量,表示k次谐波端电压向量的共轭向量,θ
x
表示ab、bc、ca相支路相位角,分别为0,-2π/3,2π/3,n为正整数,表示为k从0到n的各项求和,ω0为基频角频率,e为自然常数,j为虚数单元;
[0086]
s1.2.1,当晶闸管控制电抗器的触发角为α0时,假设晶闸管开关函数的导通角的初值为σ0=2π-2α0,则推导出开关函数构成的托普利兹矩阵;
[0087]
s1.2.2,根据当前导通角获取的托普利兹矩阵,结合式(6)推导出的三相系统稳态情况下的动态谐波域方程组,计算出三相晶闸管控制电抗器tcr端电压的各次谐波分量;
[0088]
0=a1x1 b1u
ꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0089]
式(12)中,0表示零矩阵。
[0090]
s1.2.2,利用式(3)得到晶闸管控制电抗器的支路端电压的时域函数v
x
(t),根据晶闸管控制电抗器的端电压在导通时间内积分为零的原理,结合式(3)对时域函数v
x
(t)进行数值积分,得到晶闸管控制电抗器的导通角σ;
[0091]
s1.2.3,将导通角σ代入步骤s1.2.2中进行迭代,直至导通角σ满足收敛标准为止,获得精确导通角σ
*
。
[0092]
本发明中晶闸管控制电抗器导通角求解原理如图2所示。
[0093]
步骤1.3利用式(7)确定晶闸管端电压的锁相环输出相角θv:
[0094][0095]
式(7)中,v
a,1
为模型中tcr中a相电压基频分量,angle(
·
)表示对向量求取相位角。
[0096]
步骤2、构建含静止无功补偿器电力系统的动态谐波域模型;
[0097]
步骤2.1针对晶闸管控制电抗器与固定电容器型静止无功补偿器,以固定电容器c的电压和系统等效电感ls的电流为状态变量,利用式(5)和式(6)构建三相系统中除晶闸管控制电抗器的主电路拓扑动态谐波域方程:
[0098][0099][0100]
式(8)和式(9)中,表示对x2进行微分运算,ia、ib、ic分别为流过电网a、b、c相等值电感ls的电流,va、vb、vc分别为a相、b相、c相电网电压,a2、b2为参数矩阵;
[0101]
步骤2.2构建静止无功补偿器控制部分的微分代数方程;
[0102]
步骤2.2.1、根据动态谐波域模型中母线电压基频分量和母线电压有效值的关系,利用式(10)确定母线电压有效值的标幺值v
rms
:
[0103][0104]
式(10)中,v
a,1
、v
a,-1
为母线电压v
c,a
的两个基频电压向量,v
base
为电压基准有效值;
[0105]
步骤2.2.2、采用二阶低通滤波器滤除v
rms
中的谐波分量,并利用式(11)确定滤波后母线电压有效值v
rmsf
:
[0106][0107]
式(11)中,表示xv的微分,表示v
rmsf
的微分,t1、t2为二阶低通滤波器的时间常数;
[0108]
步骤2.2.3、在定交流电压控制方式下,svc的控制器采用pi控制,利用式(12)确定系统pi控制的计算公式:
[0109][0110]
式(12)中,k
pv
、k
iv
分别为pi控制的比例和积分系数,b
t
为输出电纳;
[0111]
令电纳b
t
乘以-ωl以归一化并施加0到1的限幅,如式(13)所示:
[0112][0113]
式(13)中,bn为指令电纳;
[0114]
由式(10)-式(13)可得静止无功补偿器控制部分的微分代数方程:
[0115][0116][0117]
式(14)和式(15)中:表示对xc进行微分运算,xv是二阶低通滤波器环节级联的中间输出量,v
rms
为母线电压有效值的标幺值,xb为pi控制中积分输出,v
rmsf
为v
rms
滤波后电压有效值,v
ref
为电压参考值,ac,bc,cc,dc为参数矩阵;
[0118]
触发角α与bn表示为α(bn),如式(16)所示:
[0119][0120]
式(16)为超定方程,但方程中bn可求出唯一的α。
[0121]
步骤2.3将系统中主电路拓扑部分和控制部分相结合,从而利用式(9)和式(10)确定定电压控制模式下系统的动态谐波域模型:
[0122][0123][0124]
式(17)和式(18)中:表示对xs进行微分运算,as,bs,cs,ds为参数矩阵;
[0125]
步骤3、在此模型基础上,确定表征静止无功补偿器与电网交互稳定性评估的系统状态矩阵;
[0126]
根据含静止无功补偿器电力系统的动态谐波域模型,利用式(19)获取表征系统稳定性的状态矩阵:
[0127][0128]
式(19)中,a为系统的状态矩阵。
[0129]
步骤4、计算出系统状态矩阵特征值,利用特征值分析方法对静止无功补偿器与电网交互稳定性进行评估;
[0130]
根据式(19)推导出系统动态谐波域模型的系统状态矩阵,计算获取状态矩阵的主导特征值λ1在复平面上的分布情况,从而利用李雅普诺夫准则判断系统稳定性:
[0131]
若λ1实部为负,则表示含静止无功补偿器电力系统为小扰动稳定;
[0132]
若λ1的实部为正值,则表示含静止无功补偿器电力系统为小扰动不稳定;
[0133]
若λ1的实部为0,则表示含静止无功补偿器电力系统为临界稳定;
[0134]
步骤5、基于静止无功补偿器控制器参数对表征交互稳定性的主导特征值影响,确定静止无功补偿器控制器参数的优化。
[0135]
当系统在定交流电压控制模式下稳定运行时,以当前pi控制器k
pv
、k
iv
数值为基准,现使k
pv
增加,同时保持基准k
iv
不变,绘制系统状态矩阵的主导特征值λ2运动轨迹,此外,现使k
iv
增加,同时,保持基准k
pv
不变,绘制系统状态矩阵的主导特征值运动轨迹,获取上述两种情况下的主导特征值λ2运动轨迹后,可采用李雅普诺夫准则确定参数k
pv
和k
iv
的稳定区域:
[0136]
若λ2实部为负,则表示含静止无功补偿器电力系统为小扰动稳定;
[0137]
若λ2的实部为正值,则表示含静止无功补偿器电力系统为小扰动不稳定;
[0138]
若λ2的实部为0,则表示含静止无功补偿器电力系统为临界稳定;
[0139]
根据参数k
pv
和k
iv
的稳定区域,从而为提高控制系统的设计效率提供依据。
[0140]
步骤6、仿真分析
[0141]
本发明以图1所示的三相含svc电力系统的等效电路为例,构建的动态谐波域模型中谐波次数选取为11次。根据前文介绍的一种用于svc与电网交互稳定性评估的方法的应用,使用matlab/simulink进行仿真分析,结果如图3、图4、图5所示:
[0142]
图3为本发明的基于动态谐波域方程的小信号模型状态矩阵特征值,图中主要是奇数次谐波(h=1,3,5,7,9)对应的特征值,其中,左边圆圈区域的特征值虚部为
±
hω0,右边圆圈区域的特征值虚部为
±
ωn±
hω0,ωn为交流系统等效电感ls与固定电容器c的固有频率,其余特征值对应于低通滤波器及pi控制器的特征根。其中,5次谐波对应的共轭特征值为主导特征值,如图4中小方框区域部分。
[0143]
图4为本发明的控制器参数k
pv
阶跃时v
rmsf
变化曲线。在simulink中设定t=1.0s时k
pv
从40到70的阶跃,滤波电压v
rmsf
中低频分量逐渐增大,处于稳定振荡状态,t=2.8s将k
pv
重新减小至40,系统低频分量振荡条件不满足后由于阻尼作用迅速衰减,重新达到稳定状态,因此simulink仿真结果验证了通过计算该动态谐波域模型所对应状态矩阵特征值分布来判断系统稳定性的正确性。
[0144]
图5为本发明的控制器参数k
iv
阶跃时v
rmsf
变化曲线。在simulink中设定t=1.0s时kiv
从400到600的阶跃,滤波电压v
rmsf
中低频分量逐渐增大,处于稳定振荡状态,t=2.8s将k
pv
重新减小至400,系统低频分量振荡条件不满足后由于阻尼作用迅速衰减,重新达到稳定状态,因此simulink仿真结果验证了通过计算该dhd模型所对应状态矩阵特征值分布来判断系统稳定性的正确性。
[0145]
通过以上仿真可以得出结论:
[0146]
1本发明提出一种用于分析和量化svc与电网交互稳定性评估的方法,基于动态谐波域方程建立考虑导通角、锁相环模块影响的晶闸管控制电抗器数学模型。该模型考虑了电力电子设备晶闸管控制电抗器中各次谐波耦合作用,且精确地反映出晶闸管控制电抗器的动态特性及各次谐波的暂稳态特性。
[0147]
2本发明实现了对svc与电网交互稳定性评估的有效判别和量化,且易于推广至复杂实际系统,为柔性输配电网系统的稳定性分析提供一种新方法。
[0148]
3本发明分提出了svc与电网交互稳定性评估方法可用于分析控制器参数对系统稳定性的影响,可以有效提高了控制系统设计效率。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。