技术特征:
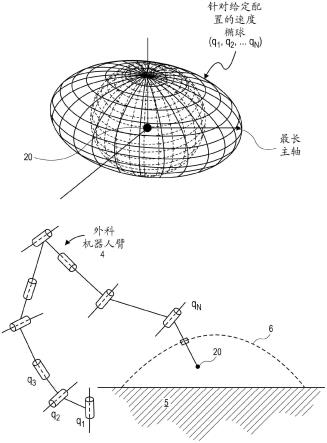
1.一种用于调节外科机器人臂的关节空间速度的方法,所述方法包括:a)计算针对外科机器人臂配置的速度椭球的最长主轴;b)接收任务空间速度,沿所述最长主轴应用所述任务空间速度的范数,以使用逆运动学来计算潜在的关节空间速度;d)计算所述外科机器人臂的i)所述潜在的关节空间速度和ii)关节空间速度极限的比率;以及e)将所述比率应用于初始关节空间速度,以产生经过调节的关节空间速度。2.根据权利要求1所述的方法,其中,所述关节空间速度极限小于所述潜在的关节空间速度,并且所述经过调节的关节空间速度小于所述关节空间速度极限。3.根据权利要求2所述的方法,所述方法还包括:接收新的任务空间速度;将所述新的任务空间速度转换为新的关节空间速度;基于将所述新的任务空间速度与先前的任务空间速度进行比较来计算新的比率;以及将所述新的比率应用于所述新的关节空间速度以产生新的经过调节的关节空间速度。4.根据权利要求3所述的方法,所述方法还包括:应用所述新的经过调节的关节空间速度以更新控制所述外科机器人臂的多个机动关节的多个马达控制命令。5.根据权利要求1所述的方法,所述方法还包括:响应于检测到所述外科机器人臂的更改配置,计算针对所述更改配置的速度椭球的新的最长主轴,接收新的任务空间速度并且产生具有所述新的任务空间速度的范数和所述新的最长主轴的取向的新的向量,以及基于所述新的向量来计算更新的潜在的关节空间速度,计算所述外科机器人臂的i)所述更新的潜在的关节空间速度和ii)所述关节空间速度极限的更新的比率,以及将所述更新的比率应用于所述新的任务空间速度的转换,以产生另一个经过调节的关节空间速度。6.根据权利要求5所述的方法,所述方法还包括:应用更新的经过调节的关节空间速度以更新控制所述外科机器人臂的多个机动关节的多个马达控制命令,使得所述臂上的端部执行器根据由uid跟踪序列指示的新的uid位置被驱动到新的任务空间位置。7.根据权利要求1所述的方法,所述方法还包括:使用所述臂的逆雅可比行列式来计算所述速度椭球。8.一种外科机器人系统,包括:外科机器人臂;处理器;以及存储器,所述存储器已经在其中存储了指令,所述指令在被所述处理器执行时a)计算针对所述外科机器人臂的第一配置的速度椭球的最长主轴,b)将任务空间速度应用于所述最长主轴以产生新的向量,并且基于所述新的向量来计算潜在的关节空间速度,
c)计算所述外科机器人臂的i)所述潜在的关节空间速度和ii)关节空间速度极限的比率,以及d)使用所述比率来产生经过调节的关节空间速度。9.根据权利要求8所述的外科机器人系统,其中,所述存储器已经在其中存储了另外的指令,所述另外的指令在被所述处理器执行时:响应于所述外科机器人臂上的端部执行器被引导到新的任务空间位置,确定所述外科机器人臂的第二配置;以及针对所述第二配置重复操作a)至d),从而为所述第二配置产生经过调节的关节空间速度。10.根据权利要求8所述的外科机器人系统,其中,所述存储器已经在其中存储了所述第一配置,所述第一配置包括所述外科机器人臂的多个关节的当前关节空间位置数据。11.根据权利要求10所述的外科机器人系统,其中,所述第一配置还包括所述外科机器人臂的多个机动关节的关节空间速度极限数据。12.根据权利要求8所述的外科机器人系统,其中,所述关节空间速度极限小于所述潜在的关节空间速度,并且所述经过调节的关节空间速度小于所述潜在的关节空间速度。13.根据权利要求12所述的外科机器人系统,其中,所述存储器具有另外的指令,所述另外的指令在被所述处理器执行时:根据uid跟踪序列来计算新的任务空间速度;将所述新的任务空间速度转换为新的关节空间速度;使用新的潜在的关节空间速度,如在b)和c)中那样计算新的比率,而无需重新计算所述最长主轴;以及将所述新的比率应用于所述新的关节空间速度,以产生新的经过调节的关节空间速度。14.根据权利要求13所述的外科机器人系统,其中,所述存储器具有另外的指令,所述另外的指令在被所述处理器执行时应用所述新的经过调节的关节空间速度以更新控制所述外科机器人臂的多个机动关节的多个马达控制命令。15.根据权利要求8所述的外科机器人系统,其中,所述存储器具有另外的指令,所述另外的指令在被所述处理器执行时通过以下方式计算所述比率:对于所述外科机器人臂中的多个活动关节中的每一个活动关节,基于所接收的任务空间速度来计算沿所述速度椭球的所述最长主轴的潜在的关节速度值;以及当所述潜在的关节速度超过相应关节的关节速度极限时,计算所述相应关节的i)所述关节速度极限和ii)所述潜在的关节速度之间的所述比率。16.一种用于调节外科机器人臂的速度的方法,所述方法包括:a)确定针对机器人臂配置的端部执行器的速度椭球,所述机器人臂具有多个活动关节,所述端部执行器定位在所述机器人臂的远侧端部处;b)对于所述多个活动关节中的每一个活动关节,通过沿所述速度椭球的最长主轴应用所接收的任务空间速度来计算相应的潜在的关节速度;
c)当所述相应的潜在的关节速度超过相应关节的关节速度极限时,计算i)所述关节速度极限和ii)所述相应的潜在的关节速度之间的比率;以及d)基于所述比率为所述多个活动关节中的每一个活动关节生成相应的经过调节的关节速度。17.根据权利要求16所述的方法,其中,所述相应的潜在的关节速度包括线速度或角速度。18.根据权利要求16所述的方法,所述方法还包括将所述任务空间速度转换为初始关节空间速度,其中,生成相应的经过调节的关节速度包括将所述初始关节空间速度乘以所计算的比率。19.根据权利要求16所述的方法,所述方法还包括当所述多个活动关节中存在所述相应的潜在的关节速度超过所述相应关节的关节速度极限的两个或多于两个关节时,分别计算所述两个或多于两个关节的多个所述比率;以及选择所述多个所述比率中的最小比率,以用于为所述多个活动关节中的每一个活动关节生成所述相应的经过调节的关节速度。20.根据权利要求16所述的方法,所述方法还包括:接收所述端部执行器的另一个任务空间速度;对于所述多个活动关节中的每一个活动关节,通过沿所述速度椭球的所述最长主轴应用所述另一个任务空间速度来计算另一个相应的潜在的关节速度;以及如果所述另一个相应的潜在的关节速度不超过所述相应关节的所述关节速度极限,则保持所述另一个相应的潜在的关节速度不变,否则,如果所述另一个相应的潜在的关节速度确实超过了所述相应关节的所述关节速度极限,则如在c)中那样计算新的比率。
技术总结
本发明提供了一种外科机器人系统,该外科机器人系统具有外科机器人臂和编程的处理器,该编程的处理器确定针对该臂的第一配置的速度椭球的最长主轴,将(沿该最长主轴的方向的)最大任务空间速度应用于计算潜在的关节空间速度的逆运动学方程,计算该臂的i)该潜在的关节空间速度和ii)关节空间速度极限的比率,并且将该比率应用于初始关节空间速度,以产生经过调节的关节空间速度。本发明还描述并要求保护其他方面。护其他方面。护其他方面。
技术研发人员:于浩然
受保护的技术使用者:威博外科公司
技术研发日:2019.11.18
技术公布日:2022/6/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。