1.本公开涉及模拟发动机内的涡轮增压器传感器,尤其涉及配置神经网络以使用特定输入虚拟地模拟涡轮增压器传感器。
背景技术:
2.用于车辆发动机的涡轮增压器通过使用空气压缩机将额外的空气推入发动机来操作,从而允许发动机的气缸更快地点火并且导致车辆提速。发动机燃烧燃料产生的排气管气体通过涡轮机,涡轮机进而驱动空气压缩机,从而形成由排气管的其他方式的废气提供动力的反馈回路。涡轮增压器传感器能够测量涡轮增压器的速度。更具体而言,涡轮增压器传感器能够测量空气压缩机和/或涡轮机多快地旋转并且将空气推入发动机。
3.然而,对于车辆而言传感器既加大开销又增加重量,还是额外的故障点,当试图提高燃料效率、减少故障点和增加对车辆内部件状态的了解时,这都是技术问题。
技术实现要素:
4.公开了为所述技术问题提供技术解决方案的系统、方法和非暂时性计算机可读存储介质。如本文公开的所配置的模拟发动机中涡轮增压器的涡轮增压器速度传感器的方法能够包括:在处理器处接收来自发动机中多个传感器的数据,其中,数据包括:发动机的排气管歧管压力;发动机的排气管质量流量;以及发动机中的燃料注射角度;经由处理器将数据作为输入输进人工神经网络中,其中,人工神经网络被训练为接收输入并且输出发动机的涡轮增压器的速度;以及在处理器处接收来自人工神经网络的涡轮增压器的速度。
5.如本文公开的所配置的系统能够包括:发动机,其具有涡轮增压器;排气管歧管压力传感器,其检测发动机的排气管歧管压力;排气管质量流量传感器,其检测发动机的排气管质量流量;注射角度传感器,其检测发动机的燃料注射角度;以及处理器,其接收以下各项作为输入:来自排气管歧管压力传感器的排气管歧管压力;来自排气管质量流量传感器的排气管质量流量;以及来自注射角度传感器的燃料注射角度;将输入输进人工神经网络中,其中,人工神经网络被训练为接收输入并且输出涡轮增压器的速度;以及使用人工神经网络来确定涡轮增压器的速度。
6.如本文公开的所配置的车辆能够包括:发动机,其具有涡轮增压器;排气管歧管压力传感器,其检测发动机的排气管歧管压力;排气管质量流量传感器,其检测发动机的排气管质量流量;注射角度传感器,其检测发动机的燃料注射角度;以及处理器,其接收以下各项作为输入:来自排气管歧管压力传感器的排气管歧管压力;来自排气管质量流量传感器的排气管质量流量;以及来自注射角度传感器的燃料注射角度;将输入输进人工神经网络中,其中,人工神经网络被训练为接收输入并且输出涡轮增压器的速度;以及使用人工神经网络来确定涡轮增压器的速度。
7.如本文公开的所配置的模拟发动机中涡轮增压器的涡轮增压器速度传感器的方法能够包括:在处理器处接收来自发动机中多个传感器的数据;经由处理器将数据作为输
入输进人工神经网络中,其中,人工神经网络被训练为接收输入并且输出发动机的涡轮增压器的速度;以及在处理器处接收来自人工神经网络的涡轮增压器的速度。
8.如本文公开的所配置的车辆能够包括:发动机,其具有涡轮增压器;排气管歧管压力传感器,其检测发动机的排气管歧管压力;以及处理器,其接收来自排气管歧管压力传感器的排气管歧管压力作为输入;将输入输进人工神经网络中,其中,人工神经网络被训练为接收输入并且输出涡轮增压器的速度;以及使用人工神经网络来确定涡轮增压器的速度。
9.如本文公开的所配置的车辆能够包括:发动机,其具有涡轮增压器;排气管质量流量传感器,其检测发动机的排气管质量流量;处理器,其接收来自排气管质量流量传感器的排气管质量流量作为输入;将输入输进人工神经网络中,其中,人工神经网络被训练为接收输入并且输出涡轮增压器的速度;以及使用人工神经网络来确定涡轮增压器的速度。
10.如本文公开的所配置的车辆能够包括:发动机,其具有涡轮增压器;注射角度传感器,其检测发动机的燃料注射角度;处理器,其接收来自注射角度传感器的燃料注射角度作为输入;将输入输进人工神经网络中,其中,人工神经网络被训练为接收输入并且输出涡轮增压器的速度;以及使用人工神经网络来确定涡轮增压器的速度。
附图说明
11.图1示出示例系统实施例;
12.图2示出训练人工神经网络以模拟涡轮增压器速度传感器的示例方法;
13.图3示出使用人工神经网络来模拟涡轮增压器速度传感器的方法;以及
14.图4示出示例方法实施例。
具体实施方式
15.下面详细描述本公开的各种实施例。虽然描述了具体实施方式,但是应当理解这样做只是为了说明的目的。在不脱离本公开精神和范围的情况下,可以使用其他组件和配置。
16.为了解决上述技术问题,具体而言是涡轮增压器速度传感器对于车辆既加大开销又增加重量而且还是额外的故障点,如本文公开的所配置的车辆能够识别涡轮增压器的速度,而无需在车辆中存在涡轮增压器速度传感器。这是通过使用车辆内的其他传感器收集数据、将来自那些其他传感器的数据输入到处理器执行的人工神经网络中,使得处理器模拟涡轮增压器速度传感器并且输出涡轮增压器的速度来实现的。
17.如本文公开的所配置的涡轮增压器速度传感器模拟——也被称为虚拟涡轮增压器速度传感器——通过使用特定数据输入来实现,这些数据输入经过处理与测试数据相关以后,允许对模拟涡轮增压器速度传感器的神经网络进行建模并且生成神经网络。然后,能够将神经网络转换为计算机可读指令(即“代码”或基于神经网络的“人工神经网络”),指令保存在非暂时性计算机可读介质中直到处理器需要执行这些指令为止。此时,处理器能够从非暂时性计算机可读介质中检索计算机可读指令,从车辆中的其他传感器接收传感器数据,并且模拟涡轮增压器速度传感器。
18.能够输入到人工神经网络以模拟涡轮增压器速度传感器的特定传感器数据能够包括:
19.·
增压压力
20.·
发动机排气管温度
21.·
空气质量流量
22.·
增压温度
23.·
环境气压
24.·
发动机速度
25.·
活塞冷却喷射压力
26.·
进气温度
27.·
冷却剂温度
28.·
燃料流量
29.·
油压
30.·
转矩值
31.·
排气管歧管压力
32.·
排气管质量流量
33.·
注射角度
34.在一些配置中,这些传感器数据的每个数据能够具有相应的传感器,而在其他配置中,能够从相应的传感器接收/生成多个传感器数据。根据本公开所配置的系统和车辆能够使用来自该列表的传感器数据的组合或者一部分数据作为到人工神经网络的输入,该人工神经网络模拟涡轮增压器速度传感器并且输出涡轮增压器的速度。
35.人工神经网络能够通过包括以下操作的处理进行训练:
36.(1)在实验室中在多个路线/周期上运行具有仪器和传感器的柴油发动机涡轮增压器,从而使用真实发动机来收集行为/传感器数据。
37.(2)运行传感器数据的相关性测试,其中单独地测试输入以基于它们对涡轮增压器速度的影响程度对其进行分类。
38.(3)通过从所有可能的输入候选中选择在不损失准确性的情况下对于训练模型而言是最小必要的那些输入来优化输入的数量。这能够通过训练多个相同的具有逐步减少使用的输入的神经网络来进行。按照相关性的顺序执行输入的移除直到达到最小准确性阈值为止,然后选择恰好在该最小阈值之前的输入作为优选输出。
39.(4)通过多个场景使用最优输入集合和训练数据来训练神经网络,每个场景产生不同的神经网络。这个过程能够用多种类型(例如,200 )来执行,从而得到多个神经网络。然后,系统能够使用预定义的度量来识别最佳的经过训练的神经网络。
40.(5)系统将最佳的所训练的神经网络转换为不同的格式——即,转换为由发动机控制单元(ecu)使用的编程语言,ecu是在发动机内运行的处理器。例如,ecu能够控制发动机内的定时和操作。
41.(6)使用新的代码片段递增(例如,被修改以包括或者被替换)ecu的原始软件,新的代码片段包含最佳的所训练的神经网络。此时,ecu被配置为执行人工神经网络。
42.(7)如果需要对ecu进行额外测试,能够将由ecu的嵌入式神经网络生成的信号与在基于实验室的发动机内运行的真实涡轮增压器速度传感器进行比较。这样能够确保到ecu的输入产生正确的涡轮增压器速度并且人工神经网络被正确地配置。
43.(8)如果还需要进一步测试,cpu(计算机处理器单元)工作量、存储器和实现人工神经网络的其他物理元件也能够评估安全合规性、准确性等。这种进一步的测试也能够出现在真实车辆测试中,其中车辆同时配备有人工神经网络和真实涡轮增压器速度传感器这两者,并且比较输出以确保匹配。
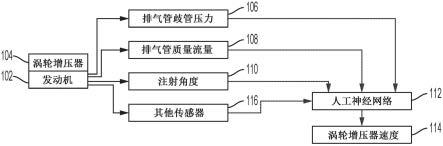
44.图1示出示例系统实施例。如图所示,车辆(诸如轿车、卡车等)的发动机102具有涡轮增压器104。发动机内还有记录诸如排气管歧管压力106、排气管质量流量108、燃料进入发动机的注射角度110的多个数据传感器以及其他传感器116。来自这些传感器的数据被用作到人工神经网络112的输入。对本文所述的人工神经网络112进行建模和编程以模拟发动机102内的涡轮增压器104的涡轮增压器速度传感器,从而输出涡轮增压器104的涡轮增压器速度114。
45.也就是说,发动机102包含提供关于发动机102性能和当前状态的数据106、108、110的多个传感器,但是为了降低成本/重量/故障点,车辆不包含涡轮增压器速度传感器。相反,处理器被配置为接收来自发动机102中的传感器的数据(诸如排气管歧管压力106、排气管质量流量108和注射角度110)以及来自其他传感器116的数据。然后将接收到的数据输入到处理器中,处理器执行被编程为使得通过车辆内的处理器执行的人工神经网络112。使用传感器数据106、108、110、116执行人工神经网络112代码的处理器是模拟涡轮增压器速度传感器的虚拟传感器或模拟器,并且输出涡轮增压器104的速度114。
46.图2示出训练人工神经网络以模拟涡轮增压器速度传感器的示例方法。本文概述的步骤是示例性的并且能够通过任何组合来实现,包括排除、添加或修改某些步骤的组合。
47.如图所示,人工神经网络通过多阶段迭代过程进行训练。第一阶段是接收在训练时间段内收集的训练发动机的训练数据(202)。换言之,当车辆在各种场景中运行时,系统从车辆中的传感器(包括涡轮增压器速度传感器)收集真实世界的传感器数据。例如,车辆能够通过很多已知传感器(包括涡轮增压器传感器)在已知路线行驶,并且能够在路线遍历期间中记录来自这些传感器的数据。在某些情况下,同一路线可以遍历多次。无论单条路线的单次遍历、单条路线的多次遍历、多条路线中的每条路线被遍历单次、或多条路线中的每条路线至少被遍历一次,都是在一个或多个训练时间段内收集数据。替换地,能够在实验室中在模拟路线的多个周期内对发动机进行测试,从而提供训练人工神经网络所需的模拟数据。
48.然后,系统识别涡轮增压器速度传感器与其他传感器之间的相关性。如图所示,这通过对训练数据内的每个输入进行回归分析来实现,由此识别每个输入在训练时间段内相对于涡轮增压器速度的相对相关性,从而得到输入中每个输入的相关性排名(204)。例如,所得到的相关性输出能够是跨多种情况和场景的每个传感器的权重。因为相关性在跨多种情况和场景时不是恒定不变的,所以使用相关性排名/相关性参数的线性方程不一定是理想的。优选地,相关性排名被替换用于对虚拟/模拟涡轮增压器速度传感器进行建模和训练,其中能够基于其他传感器的值将不同的权重应用于不同的传感器数据。
49.对虚拟/模拟涡轮增压器速度传感器进行建模和训练是迭代过程(206):使用相关性排名和输入对涡轮增压器传感器进行建模(208),并且基于相关性排名从输入中选择多个输入,使得建模的准确性不下降到阈值准确性以下,从而得到输入的优化集合(210)。如图所示,该过程能够根据需要重复多次以通过线性优化(诸如最小二乘优化)或其他优化方
案(诸如凸优化)来识别最佳模型。在某些情况下,该识别最佳模型的过程可以不是迭代的,使得模型准确地预测(高于阈值精度)最佳方式以在单次迭代中以优化方式使用其他传感器数据来预测涡轮增压器速度。
50.然后,系统迭代地基于输入的优化集合对基于状态的神经网络进行编程,从而得到编程的基于状态的神经网络(212)。在一些配置中,将生成的模型转换为编程的神经网络的过程并非迭代的,使得在单个、非迭代的过程中对神经网络进行编程。然后,通过将编程的基于状态的神经网络转换为可通过处理器执行的基于代码的神经网络,将编程的基于状态的神经网络转换为人工神经网络。换言之,基于状态的神经网络从基于状态的配置转换为可通过处理器执行的代码,可执行代码形成本文所述的人工神经网络。
51.图3示出使用人工神经网络来模拟涡轮增压器速度传感器的方法。本文概述的步骤是示例性的并且能够通过任何组合来实现,包括排除、添加或修改某些步骤的组合。
52.如图所示,方法能够包括在处理器处接收来自发动机中的多个传感器的数据(302),其中,数据包括:发动机的排气管歧管压力(304)、发动机的排气管质量流量(306)、以及发动机中的燃料注射角度(308)。发动机能够是任何类型的具有涡轮增压器的发动机,诸如柴油发动机、汽油发动机或其他燃料类型的发动机。能够从传感器接收的数据的附加示例能够包括以下的一个或多个:发动机的增压压力、发动机的增压温度、发动机中活塞的活塞冷却喷射压力、发动机中冷却剂的冷却剂温度、发动机中活塞的转矩值、发动机的发动机排气管温度、环境气压、发动机的发动机速度、发动机的进气温度、发动机的燃料流量和发动机的油压。然而,多个传感器不包括与发动机中的涡轮增压器相关联的涡轮增压器速度传感器。
53.经由处理器将数据作为输入输进人工神经网络中,其中,将人工神经网络训练为接收输入并且输出发动机的涡轮增压器的速度(310)。能够通过以下方式训练人工神经网络:在训练处理器处接收训练发动机的训练数据,训练数据包括在训练发动机的训练时间段内收集的传感器信息,传感器信息包括与发动机的数据相对应的、到训练发动机的输入;在训练处理器处接收来自涡轮增压器速度传感器的训练涡轮增压器数据;经由训练处理器对传感器信息内的每个输入进行回归分析,由此识别每个输入相对于训练涡轮增压器数据的相对相关性,从而得到输入中每个输入的相关性排名;经由训练处理器迭代地:使用相关性排名和输入对涡轮增压器速度传感器进行建模;以及基于相关性排名从输入中选择多个输入,使得建模的准确性不下降到阈值准确性以下,从而得到输入的优化集合;经由训练处理器迭代地基于输入的优化集合对基于状态的神经网络进行编程,从而得到编程的基于状态的神经网络;以及经由训练处理器,通过将编程的基于状态的神经网络转换为处理器可执行的基于代码的神经网络,将编程的基于状态的神经网络转换为人工神经网络。
54.在一些配置中,所示方法能够进一步包括:在处理器处从外部非暂时性计算机可读介质检索人工神经网络,使得能够通过处理器来执行人工神经网络的可执行代码。
55.参照图4,示例性系统包括通用计算装置400,通用计算装置400包括处理单元(cpu或处理器)420和系统总线410,系统总线410将包括诸如只读存储器(rom)440和随机存取存储器(ram)450的系统存储器430的各种系统组件联接到处理器420。系统400能够包括与处理器420直接连接、靠近或集成为处理器420的一部分的高速存储器的缓存。系统400将数据从存储器430和/或存储装置460复制到缓存以用于处理器420的快速访问。通过这种方式,
缓存提供了避免处理器420在等待数据时延迟的性能提升。这些和其他模块能够控制或被配置为控制处理器420进行各种动作。其他系统存储器430也可以使用。存储器430能够包括具有不同性能特性的多种不同类型的存储器。可以理解,本公开可以在具有一个以上处理器420的计算装置400上运行,或者在联网在一起以提供更大处理能力的计算装置的群组或集群上运行。处理器420能够包括任何通用处理器和硬件模块或软件模块,诸如存储在存储装置460中的模块1 462、模块2 464和模块3 466,其被配置为控制处理器420以及专用处理器,其中将软件指令合并到实际处理器设计中。处理器420本质上可以是完全独立的计算系统,包含多个核心或处理器、总线、存储器控制器、缓存等。多核心处理器可以是对称的或不对称的。
56.系统总线410可以是若干类型总线结构的任何一种类型,包括使用多种总线架构的任何一种架构的存储器总线或存储器控制器、外围总线和本地总线。存储在rom 440等中的基本输入/输出(bios)可以提供有助于诸如在启动期间在计算装置400内的元件之间传送信息的基本例程。计算装置400还包括存储装置460,诸如硬盘驱动器、磁盘驱动器、光盘驱动器、磁带驱动器等。存储装置460能够包括用于控制处理器420的软件模块462、464、466。可以考虑其他硬件或软件模块。存储装置460通过驱动接口连接到系统总线410。驱动器和相关联的计算机可读存储介质为计算装置400提供计算机可读指令、数据结构、程序模块和其他数据的非易失性存储。一方面,进行特定功能的硬件模块包括存储在有形计算机可读存储介质中与诸如处理器420、总线410、显示器470等硬件组件有关的软件组件,以执行功能。另一方面,系统能够使用处理器和计算机可读存储介质来存储指令,在通过处理器执行时,指令使得处理器进行方法或其他特定动作。根据装置类型的不同,诸如装置400是小型手持计算装置、台式计算机或计算机服务器,来考虑基本组件和适当变化。
57.虽然本文所述示例性实施例采用硬盘460,但是能够存储计算机可访问的数据的其他类型的计算机可读介质,诸如磁带盒、闪存、数字通用盘、盒式磁带、随机存取存储器(ram)450和只读存储器(rom)440也可以在示例性操作环境中使用。有形计算机可读存储介质、计算机可读存储装置或计算机可读存储器装置明确地排除诸如瞬态波、能量、载波信号、电磁波和信号本身的介质。
58.为了实现与计算装置400的用户交互,输入装置490表示任意数量的输入机构,诸如用于语音的麦克风、用于手势或图形输入的触敏屏幕、键盘、鼠标、动作输入、语音等等。输出装置470也能够是本领域技术人员已知的多种输出机构的一种或多种。在一些情况下,多模式系统使得用户能够提供多种类型的输入以与计算装置400通信。通信接口480通常支配和管理用户输入和系统输出。对于在任何特定硬件布置上的操作没有限制,因此本文的基本特征可以容易地随着改进的硬件或固件布置的研发来用其替换。
59.使用诸如“x、y和z中的至少一个”、“x、y或z中的至少一个”、“x、y和z中的至少一个或多个”、“x、y或z中的至少一个或多个”、“x、y和/或z中的至少一个或多个”或“x、y和/或z中的至少一个”的语言旨在同时涵盖包含单个项(例如,仅x、或仅y或仅z)和多个项(例如,{x和y}、{x和z}、{y和z}或{x、y和z})。短语“至少一个”和类似短语不旨在传达每个可能项必须存在的要求,虽然每个可能的项都可能存在。
60.以上所述各种实施例仅通过说明的方式提供并且不应解释为限制本公开的范围。对本文所述原理可以进行各种修改和改变,而无需遵循本文所示和所述的示例性实施例和
应用,也无需背离本公开的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
