技术特征:
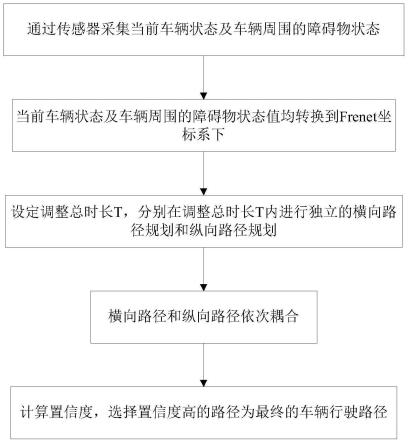
1.一种用于驾驶辅助系统的行车路径调整规划方法,其特征在于:包括以下步骤:步骤1:通过传感器采集当前车辆状态及车辆周围的障碍物状态;其中,车辆状态包括车辆的位置坐标、速度和加速度;车辆周围障碍物状态包括障碍物的位置坐标和速度信息;步骤2:将步骤1采集得到的转换到当前车辆状态及车辆周围的障碍物状态均转换到frenet坐标系下;步骤3:设定调整总时长t,分别在调整总时长t内进行独立的横向路径规划和纵向路径规划;步骤4:将步骤3中规划的横向路径和纵向路径依次耦合;得到耦合后的路径轨迹;步骤5:分别计算步骤4得到的每条耦合后的路径轨迹的平滑度g_grad,耦合后的路径轨迹到车道中心线的横向距离d_lat和耦合后的路径轨迹的航向角与车道航向角的差值yaw_diff;根据公式:confidence=x
t
px;计算置信度confidence,选择置信度高的路径为最终的车辆行驶路径;其中,x=[g_grad,d_lat,yaw_diff],p为协方差,x
t
表示x的转置矩阵。2.根据权利要求1所述的用于驾驶辅助系统的行车路径调整规划方法,其特征在于:将调整总时长t平均分成多个调整区间,根据每个调整时间点分别规划车辆的横向和纵向的状态,将每个调整时间点车辆的横向状态和纵向状态分别形成横向路径轨迹和纵向路径轨迹。3.根据权利要求2所述的用于驾驶辅助系统的行车路径调整规划方法,其特征在于:根据每个调整时间点规划车辆的横向状态(d
i
,v
横
,a
横
)的方法为:分别根据车辆在不同调整时间点回到车辆车道中心线行驶进行规划;根据公式d
j
=d*(t
i-t
j
)/(t
i-t0)得到在第i个调整时间点,车辆到达车道中心线的情况下,在第j个调整时间点车辆在frenet坐标系中的横向位置d
j
;其中,i=1、2、
…
、n;j=1、2、
…
、i-1;在第i个调整时间点前,每个调整时间点时,d
i
=d
j
,车辆的横向状态为(d
j
,0,0);在第i个调整时间点以后,每个调整时间点时,d
i
=0,车辆的横向状态为(0,0,0);其中,d
i
表示在第i个调整时间点车辆在frenet坐标系中的横向位置;v
横
表示在frenet坐标系中车辆的横向速度,a
横
表示在frenet坐标系中车辆的横向加速度。4.根据权利要求2所述的用于驾驶辅助系统的行车路径调整规划方法,其特征在于:根据每个调整时间点规划车辆的纵向状态的方法为:根据车辆前方障碍物的位置、速度信息,规划纵向路径中每个调整时间点时车辆的纵向状态(s
i
,v
i纵
,a
纵
),其中s
i
表示第i个调整时间点的纵向距离,v
i纵
表示车辆在第i个调整时间点的纵向速度;当车辆前方不存在障碍物,则车辆以当前速度做匀速运动,对应每个调整时间点,车辆的纵向距离为s
i
=v
纵
*(t
i-t0),i=1、2、
…
、n;其中,s
i
表示第i个调整时间点的纵向距离,v
纵
表示在frenet坐标系中t0时刻车辆的纵向速度;纵向路径中每个调整时间点对应的车辆的纵向状态为(v
纵
*(t
i-t0),v
纵
,0);当车辆前方存在障碍物,则比较障碍物与车辆之间的行驶速度:如果障碍物的行驶速度不小于车辆的行驶速度,则车辆以当前速度做匀速运动,对应每个调整时间点,车辆的纵向距离为s
i
=v
纵
*(t
i-t0),i=1、2、
…
、n;其中,s
i
表示第i个调整时间点的纵向距离,v
纵
表示在frenet坐标系中t0时刻车辆的纵向速度;纵向路径中每个调
整时间点对应的车辆的纵向状态为(v
纵
*(t
i-t0),v
纵
,0);如果障碍物的行驶速度小于车辆的行驶速度,则车辆做匀减速运动,其中其中,v
纵
表示在frenet坐标系中t0时刻车辆的纵向速度;v0表示在调整起始时刻t0时,障碍物的纵向速度;l表示在调整起始时刻t0时,车辆与障碍物之间的纵向距离;第i个调整时间点时,车辆的纵向距离为车辆的纵向速度为v
i纵
=v-a
纵
(t
i-t0),纵向路径中中每个调整时间点对应的车辆的纵向状态为v-a
纵
(t
i-t0),a
纵
);其中,i=1、2、
…
、n。5.根据权利要求2所述的用于驾驶辅助系统的行车路径调整规划方法,其特征在于:所述将步骤3中规划的横向路径和纵向路径依次耦合的方法为:将相同调整时间点的横向状态和纵向状态进行耦合,生成对应调整时间的综合状态;其中,综合状态包括耦合后的车辆位置,耦合后的车辆速度和耦合后的车辆的加速度。6.根据权利要求5所述的用于驾驶辅助系统的行车路径调整规划方法,其特征在于:得到耦合后的路径轨迹耦合后的路径轨迹到车道中心线的横向距离d_lat为耦合后每个调整时间点对应的车辆所在位置的点到车道中心线的横向距离的平均值;耦合后的路径轨迹的航向角与车道航向角的差值yaw_diff即为每个调整时间点对应的车辆的航向角与车道航向角的差值的平均值。7.一种驾驶辅助系统,其特征在于:包括数据采集模块、路径规划模块和控制模块,其中,数据采集模块采集当前车辆状态及车辆周围的障碍物状态;并将采集到的数据发送至路径规划模块;路径规划模块将接收到的数据转换到到frenet坐标系下,在调整总时长t内进行独立的横向路径规划和纵向路径规划;再将规划的横向路径和纵向路径依次耦合;得到耦合后的路径轨迹;根据公式confidence=x
t
px计算每条耦合后的路径轨迹的置信度,将置信度最高的路径轨迹数据发送到控制模块;其中,x=[g_grad,d_lat,yaw_diff],p为协方差,x
t
表示x的转置矩阵;g_grad为耦合后的路径轨迹的平滑度;d_lat为耦合后的路径轨迹到车道中心线的横向距离;yaw_diff为耦合后的路径轨迹的航向角与车道航向角的差值。控制模块根据接收到的路径轨迹数据控制车辆沿着对应的路径行驶。8.根据权利要求7所述的驾驶辅助系统,其特征在于:将调整总时长t平均分成多个调整区间,根据每个调整时间点分别规划车辆的横向和纵向的状态,将每个调整时间点车辆的横向状态和纵向状态分别形成横向路径轨迹和纵向路径轨迹。9.根据权利要求7所述的驾驶辅助系统,其特征在于:还包括车道线识别模块,车道线识别模块实时将识别出的车道线坐标发送到路径规划模块;路径规划模块根据接收到的车道线坐标可以实时获取车道中心线坐标。10.一种存储软件的计算机可读介质,其特征在于,所述软件包括能通过一个或多个计算机执行的指令,所述指令通过这样的执行使得所述一个或多个计算机执行操作,所述操作包括如权利要求1-6中任意一项所述的用于驾驶辅助系统的行车路径调整规划方法的流程。
技术总结
本发明公开一种用于驾驶辅助系统的行车路径调整规划方法,主要在Frenet坐标系下,根据车辆的当前状态,结合在一定调整时长内的调整时间点分别对车辆的横向状态和纵向状态分别进行规划,再将规划的横向状态和纵向状态进行耦合;依据每条耦合后的路径轨迹的置信度,选择最优的调整规划路径。本发明还提供了一种采用上述行车路径调整规划方法的驾驶辅助系统和一种存储软件的计算机可读介质。本发明规划的路径实现简单,计算量小,获取路径的速度快,鲁棒性强;将横向与纵向规划先解耦再耦合得到最优路径,能够辅助驾驶员在不变道的情况下,控制车辆沿着车道中心线行驶,并根据车辆前方障碍物状态,控制车辆速度。控制车辆速度。控制车辆速度。
技术研发人员:李赵 宋少杰 陈诚 张旸
受保护的技术使用者:奥特酷智能科技(南京)有限公司
技术研发日:2022.03.25
技术公布日:2022/6/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。