1.本发明涉及水体透明度测量方法,特别涉及一种基于图像识别的水体透明度测量方法。
背景技术:
2.采用人工通过垂线将塞式盘缓缓放入水中,根据人眼观察塞式盘分界线是否可辨,找到临界点,再根据此刻垂线吃水深度进行读数。
3.该方法涉及人工放线、人工判别盘面交线是否可辨,人工读取水位等众多人工参与的步骤,与个人的视力、经验等相关,容易收到人工主观判断的影响,因此读数精度及稳定性难以保证。
4.近期有部分测量方法引入了通过计算机视觉技术用于分辨盘面分界线。
5.不具备测量水位功能,需额外引入外部水位数据或人工读数的参与,未能避免外部因素带来的影响。
技术实现要素:
6.本发明的目的在于提供一种基于图像识别的水体透明度测量方法,充分利用计算机视觉技术对水体透明度测量中涉及人工参与的各个环节进行了改进,包括盘面分界线的识别、水面高度测量等,可做到全程无需人工参与,自动完成测量,以解决上述背景技术中提出的问题。
7.为实现上述目的,本发明提供如下技术方案:
8.一种基于图像识别的水体透明度测量方法,包括如下步骤:
9.步骤1:边缘终端设备在远程唤醒或定时唤醒的情况下,进行边缘终端设备初始化,包括启动摄像头、塞式盘检测模型服务、图像采集服务;
10.步骤2:启动塞式盘放线程序,电机带动主动轮顺时针方向旋转,将塞式盘缓慢放下;
11.步骤3:将采集到的一帧图像送入训练好的神经网络模型对图像进行预测分析,得到是否能分辨除图像中塞式盘分界线的判断结果,若检测结果为是,则回到步骤2;若检测结果为否,则执行步骤4;
12.步骤4:边缘终端设备控制电机停止转动;
13.步骤5:采样图像输入定位球检测模型,计算得到定位球直径的像素长度;结合初始位置定位球直径标定的像素长度,根据透视变换原理可计算得到定位球与初始位置间的距离,记为lb1;
14.步骤6:根据光栅里程计得到线缆放出长度,记为lw1;
15.步骤7:计算得到第一次塞式盘入水深度,记为l1,l1=lw1 r
–
lb1(r为定位球半径);
16.步骤8:边缘终端设备控制电机持续放线10cm后停止动作;
17.步骤9:边缘终端设备控制电机逆时针旋转带动主动轮收回线缆,将塞式盘缓慢上提,同时采样图像送入塞式盘检测模型;
18.步骤10:将采集到的一帧图像送入训练好的神经网络模型对图像进行预测分析,得到是否能分辨除图像中塞式盘分界线的判断结果,若检测结果为是,则回到步骤11;若检测结果为否,则执行步骤9;
19.步骤11:边缘终端设备控制电机停止转动;
20.步骤12:采样图像送入水面定位球检测模型,计算得到定位球直径的像素长度;结合初始位置定位球直径标定的像素长度,根据透视变换原理可计算得到定位球与初始位置间的距离,记为lb2;
21.步骤13:根据光栅里程计得到线缆放出长度,记为lw2;
22.步骤14:计算得到第一次塞式盘入水深度,记为l2,l2=lw2 r
–
lb2(r为定位球半径);
23.步骤15:取两次测量均值作为最终测量值,记为l,l=(l1 l2)/2;
24.步骤16:边缘终端设备控制电机收回线缆回到初始位置,等待下次测量。
25.进一步地,包括测量装置,测量装置分为机械传动部分、运动控制部分、计算测量部分。
26.进一步地,所述机械传动部分包括立柱、横臂、主动轮、变向轮、线缆和防尘罩,所述立柱的底部插接于基座上,所述立柱的顶部焊接有横臂,所述横臂的一端安装有主动轮,主动轮通过线缆连接安装于横臂上的变向轮,所述横臂的外部安装防尘罩。
27.进一步地,所述运动控制部分包括边缘终端设备、电机和限位开关,所述边缘终端设备电连接于电机,电机的输出轴连接于主动轮,所述变向轮的斜下方安装限位开关。
28.进一步地,所述电机内含光栅里程计。
29.进一步地,所述计算测量部分包括摄像头、定位球和塞式盘,所述摄像头安装于横臂的底端,所述线缆远离主动轮的一端连接塞式盘,塞式盘上接触式连接定位球,线缆穿过其孔径。
30.与现有技术相比,本发明的有益效果是:
31.(1)测量过程无需人工参与,减少主观判断的影响。
32.(2)通过图像分析的方式实现了水面高度的判断,无需利用其他测量设备。
33.(3)测量动作简单速度快,摄像头画面中即涵盖了塞式盘也涵盖了定位球,一套动作完成水位及透明度的测量。
34.(4)通过上下两次检测判断进一步降低了水面波动、采样间隔等带来的影响。
35.(5)相比固定在水中的螺旋状塞式盘测量方式,测量时再放入水中,避免了塞式盘长期在水中被水藻、淤泥等附着,影响观测的问题,减少人工清理工作。
附图说明
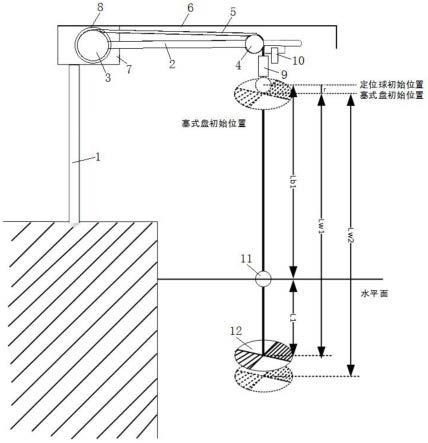
36.图1为本发明的测量装置的整体结构图;
37.图2为本发明的测量流程图。
38.图中:1、立柱;2、横臂;3、主动轮;4、变向轮;5、线缆;6、防尘罩;7、边缘终端设备;8、电机;9、限位开关;10、摄像头;11、定位球;12、塞式盘。
具体实施方式
39.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
40.参阅图1,一种基于图像识别的水体透明度测量方法,包括测量装置,测量装置分为机械传动部分、运动控制部分、计算测量部分,如图1所示。
41.机械传动部分包括立柱1、横臂2、主动轮3、变向轮4、线缆5和防尘罩6,立柱1的底部插接于基座上,立柱1固定支撑测量装置,立柱1的顶部焊接有横臂2,横臂2将塞式盘12等部件延申至水面上方,横臂2的一端安装有主动轮3,由电机8轴承带动进行顺逆时针方向转动,主动轮3通过线缆5连接安装于横臂2上的变向轮4,变向轮4安装在横臂2靠近水面端,线缆5通过变向轮4垂向水面,线缆5一头缠绕在主动轮3上,一头固定在塞式盘12底部,用于控制塞式盘12下降、上升,横臂2的外部安装防尘罩6,塞式盘12回收状态下遮挡外界灰尘,以防止长期堆积影响观测。
42.运动控制部分包括边缘终端设备7、电机8和限位开关9,所述边缘终端设备7电连接于电机8,边缘终端设备7用于控制电机8转动、图像采集及分析计算,电机8内含光栅里程计,电机8的输出轴连接于主动轮3,电机8用于带动主动轮3旋转,实现塞式盘12的上升、下降,变向轮4的斜下方安装限位开关9,限位开关9用于判断塞式盘12是否处于初始位置,同时保证塞式盘12回到初始位置后,电机8停止转动。
43.计算测量部分包括摄像头10、定位球11和塞式盘12,摄像头10安装于横臂2的底端,摄像头10安装在横臂2上变向轮4附近,焦平面平行于水平面,用于采集定位球11及塞式盘12实时图像,线缆5远离主动轮3的一端连接塞式盘12,塞式盘12上接触式连接定位球11,定位球11为中心含通孔的塑料小球,线缆5穿过其孔径,可漂浮在水面,塞式盘12为塑料圆盘,均匀分为4个90
°
扇形部分黑白相间。
44.如图2所示,一种基于图像识别的水体透明度测量方法,包括如下步骤:
45.步骤1:边缘终端设备7在远程唤醒或定时唤醒的情况下,进行边缘终端设备7初始化,包括启动摄像头、塞式盘检测模型服务、图像采集服务(以每秒12帧的频率从摄像头10视频流进行图像采样);
46.步骤2:启动塞式盘12放线程序,电机8带动主动轮3顺时针方向旋转,将塞式盘12缓慢放下;
47.步骤3:将采集到的一帧图像送入训练好的神经网络模型对图像进行预测分析,得到是否能分辨除图像中塞式盘12分界线的判断结果,若检测结果为是,则回到步骤2;若检测结果为否,则执行步骤4;
48.步骤4:边缘终端设备7控制电机8停止转动;
49.步骤5:采样图像输入定位球11检测模型,计算得到定位球11直径的像素长度;结合初始位置定位球11直径标定的像素长度,根据透视变换原理可计算得到定位球11与初始位置间的距离,记为lb1;
50.步骤6:根据光栅里程计得到线缆5放出长度,记为lw1;
51.步骤7:计算得到第一次塞式盘12入水深度,记为l1,l1=lw1 r
–
lb1(r为定位球半
径);
52.步骤8:边缘终端设备7控制电机8持续放线10cm后停止动作;
53.步骤9:边缘终端设备7控制电机8逆时针旋转带动主动轮3收回线缆,将塞式盘12缓慢上提,同时采样图像送入塞式盘12检测模型;
54.步骤10:将采集到的一帧图像送入训练好的神经网络模型对图像进行预测分析,得到是否能分辨除图像中塞式盘12分界线的判断结果,若检测结果为是,则回到步骤11;若检测结果为否,则执行步骤9;
55.步骤11:边缘终端设备7控制电机8停止转动;
56.步骤12:采样图像送入水面定位球11检测模型,计算得到定位球11直径的像素长度;结合初始位置定位球11直径标定的像素长度,根据透视变换原理可计算得到定位球11与初始位置间的距离,记为lb2;
57.步骤13:根据光栅里程计得到线缆5放出长度,记为lw2;
58.步骤14:计算得到第一次塞式盘12入水深度,记为l2,l2=lw2 r
–
lb2(r为定位球半径);
59.步骤15:取两次测量均值作为最终测量值,记为l,l=l1 l2)/2;
60.步骤16:边缘终端设备7控制电机8收回线缆5回到初始位置,等待下次测量。
61.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明披露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。