1.本公开涉及一种沿着有待车辆行驶的路线的路段选择。
背景技术:
2.车辆远行在现场测试数据收集中起着至关重要的作用,以验证主动安全性和自主驾驶。随着对验证数据的高要求,现今在这种车辆远行期间收集了数百万公里的数据。由于计算资源以及存储容量有限,而且为了进一步减少碳足迹,期望谨慎的远行路线规划,以实现有效的数据收集。通常,为了尽可能多地在相关的运行设计域odd——其例如可以以预定的速度和/或速度范围为例——内行驶,可以在进行远行之前例如在数字地图和实时交通信息的支持下规划有待行驶的路线,或者,路线规划可以比如由操作者预先执行,例如通过分析统计和/或历史的交通流量并且通过考虑交通设施,可以基于该交通设施来规划路线并且随后提供给远行车辆驾驶员。然而,这样的远行路线规划可能远非有效的,例如,因为例如操作者和/或例如车辆驾驶员可能不知道未来近期的交通情况和/或可能不具有对即将到来的车辆远行的区域中的交通环境的广泛认知。
技术实现要素:
3.因此,本文实施例的目的是提供一种用于以改进的和/或替代的方式来确定对有待车辆行驶的路线的至少一部分的方法。
4.可以通过本文公开的主题来实现上述目的。在所附的权利要求书、下面的描述和附图中阐述了实施例。
5.所公开的主题涉及一种由车辆的路线规划系统执行来沿着有待所述车辆行驶的路线进行路段选择的方法。该路线规划系统在定位系统的支持下根据数字地图来确定该车辆的地理位置。该路线规划系统还基于车辆的地理位置在数字地图中识别车辆正在接近和/或位于的前方道路交叉点,该前方道路交叉点包括两个或更多个前方路段。此外,该路线规划系统还推导适用于数字地图的地图区域的交通信息数据,该地图区域覆盖包括该两个或更多个前方路段的多个路段。此外,该路线规划系统还通过经由神经网络馈送有关于交通信息数据的一个或多个参数和有关于车辆地理位置的一个或多个参数来从该两个或更多个前方路段中选择路段,该神经网络训练来选择导致一个或多个设定的运行设计域odd要求内的最大行驶范围的路段。
6.所公开的主题还涉及一种车辆的路线规划系统,用于沿着有待车辆行驶的路线进行路段选择。该路线规划系统包括车辆位置确定单元,其用于——和/或适配为——在定位系统的支持下根据数字地图来确定车辆的地理位置。该路线规划系统还包括前方道路识别单元,其用于——和/或适配为——基于车辆的地理位置在数字地图中识别车辆正在接近和/或位于的前方道路交叉点,该前方道路交叉点包括两个或更多个前方路段。此外,该路线规划系统还包括交通信息推导单元,其用于——和/或适配为——推导适用于数字地图的地图区域的交通信息数据,该地图区域覆盖包括该两个或更多个前方路段的多个路段。
此外,该路线规划系统还包括路段选择单元,其用于通过经由神经网络馈送有关于交通信息数据的一个或多个参数和有关于车辆地理位置的一个或多个参数来从该两个或更多个前方路段中选择路段,该神经网络训练来选择导致一个或多个设定的运行设计域odd要求内的最大行驶范围的路段。
7.此外,所公开的主题涉及一种包括本文所述的路线规划系统的车辆。
8.而且,所公开的主题涉及一种计算机程序产品,该计算机程序产品包括含有计算机程序代码装置的计算机程序,该计算机程序代码装置布置为使得计算机或处理器执行本文所述的路线规划系统的步骤,该计算机程序产品存储在计算机可读介质或载波上。
9.所公开的主题还涉及一种具有其上存储的所述计算机程序产品的非易失性计算机可读存储介质。
10.因此,根据设定的odd要求,引入了一种支持路线规划的方法——例如适用于车辆远行。也就是说,由于在定位系统的支持下确定了车辆根据数字地图的地理定位,因此所述车辆根据数字地图被地理定位,例如被赋予时间戳。因此,可以比如在或基本在有待车辆行驶的路线的起始处或者在这种路线正在进行中时建立车辆的当前位置。此外,即,由于基于车辆的地理位置在数字地图中识别出车辆正在接近和/或位于的前方道路交叉点(该前方道路交叉点包括两个或更多个前方路段),因此在数字地图中沿着车辆正在行驶和/或所定位的道路或路段找到了所述车辆前方的道路交叉点——例如以交叉口、道路出口或道路入口为代表,该道路交叉点分支成至少两个不同和/或分离的路段。此外,即,由于推导出了适用于数字地图的、覆盖包括两个或更多个前方路段的多个路段的地图区域的交通信息数据,路线规划系统可以获知与数字地图的、覆盖前方路段和潜在的其他路段的地理区域——比如城市或城市的一部分——相关的实时或基本实时的交通信息——比如当前交通流量。因此,其可以针对所述区域和/或其路段来推导,例如正在进行的交通堵塞和/或交通流速,这可以由路线规划系统利用来进行评估。此外,即,由于通过经由神经网络(该神经网络训练来选择导致一个或多个设定的运行设计域odd要求内的最大行驶范围的路段)馈送有关于交通信息数据的一个或多个参数和有关于车辆地理位置的一个或多个参数来从该两个或更多个前方路段中选择路段,在所述神经网络的支持下从前方路段中选出了有助于根据设定的odd要求使行驶最优化的路段。即,通过在模拟和/或实际交通中训练神经网络,该神经网络使用一个或多个有关于在行驶期间——比如在车辆远行期间——要满足的意向odd要求的参数连同有关于车辆地理位置、数字地图的地图区域的道路交叉点和/或路段、时间点和/或推导出的关于所述时间点的交通信息的参数作为输入,所述神经网络可以训练来根据设定的odd要求来获知针对最大和/或最优行驶——适用于所述地图区域——的路段选择。因此,通过随后在随着车辆实时行驶期间——例如在比如以上例示的车辆远行期间——将当前对该地图区域有效的一个或多个交通信息数据参数连同当前有效的一个或多个车辆地理位置参数一起馈送到训练的网络来利用所述训练的网络,输出了和/或可以由此推导出前方路段中被计算为最佳选项的一个路段,该最佳选项使得车辆——如果沿着所选定的路段行驶——能够在设定的odd要求内使行驶最大化。因此,由于在所介绍的发明构思中考虑到了当前交通情况的动态特性——这在很大程度上可能取决于地理位置、当日时间、周中日期等,可以以有效的方式实现设定的odd要求,尤其是在随着车辆在与数字地图的地图区域相对应的地理区域内行驶而连续或间歇地重复所介绍的方法的情况下。
11.为此,提供了一种方法来以改进的和/或替代的方式来确定有待车辆行驶的路线的至少一部分。
12.下面将更详细地讨论技术特征和相应的优点。
附图说明
13.从以下详细描述和附图将容易理解包括特定特征和优点的非限制性实施例的各个方面,在附图中:
14.图1示出根据本公开的实施例的示例性路线规划系统的示意图;
15.图2是示出根据本公开的实施例的示例性路线规划系统的示意性框图;和
16.图3是示出根据本公开的实施例的由路线规划系统执行的示例性方法的流程图。
具体实施方式
17.现在将在下文中参考附图更全面地描述本公开的非限制性实施例,在附图中示出了本公开的当前优选实施例。然而,本公开可以以许多不同的形式呈现,而不应被解释为限于本文阐述的实施例。相同的附图标记在整个本公开中指代相同的元件。图中一些方框的虚线表示这些单元或动作是可选的而非强制的。
18.下面将根据本文中有关于沿着有待车辆行驶的路线的路段选择的实施例来公开一种根据设定的odd要求来支持路线规划的方法——例如适用于车辆远行。
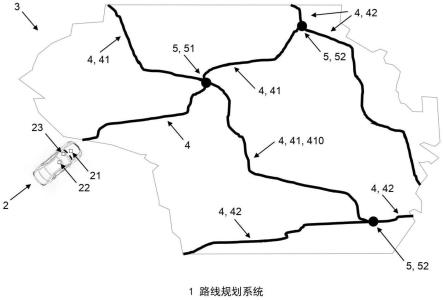
19.现在参考附图,在图1、图2中描绘了根据本公开的实施例的示例性路线规划系统1的相应示意图和示意性框图。路线规划系统1至少部分地设置在车辆2上,例如包括在车辆2中。所述车辆2可以以示例性的方式设定为行驶路线,比如用于进行即将开始和/或已经在进行的车辆远行——例如用于现场测试数据收集,用于验证例如主动安全和自主驾驶。
20.示例性的车辆2可以由任意的——例如已知的——有人驾驶或无人驾驶的车辆来代表,例如发动机推动或电力驱动的车辆,比如轿车、卡车、货车、面包车、公交车和/或拖拉机,并且还可以例如由原型车辆和/或现场测试数据收集车辆来代表。此外,根据示例,术语“车辆”可以指“自主和/或至少部分自主的车辆”、“自动和/或至少部分自动的车辆”、“无人驾驶和/或至少部分无人驾驶的车辆”和/或“自动驾驶和/或至少部分自动驾驶的车辆”,其在可选的先进驾驶辅助系统adas或自动驾驶ad系统21的支持下实现。所述adas或ad系统21——其中adas系统潜在地可以被认为是ad系统的子集和/或部分——可以指任意的adas和/或ad系统,例如本领域中已知的和/或尚待开发的adas和/或ad系统,其包括适配为在驾驶时辅助车辆驾驶员的电子系统和/或包括各种部件的组合,这些部件可以限定为由电子和机械代替人类驾驶员在其中执行车辆2的感知、决策和/或操作的系统。车辆2和/或adas或ad系统21因此可以包括、设置有和/或具有搭载的可选感知系统(未示出)/或类似的系统和/或功能,其适配为估计车辆2的环境,并且随后适配为在——例如公知的——高清晰度hd地图和/或等同物和/或其接替物的支持下估计环境的世界视野。这种例示性感知系统或类似系统可以指任何公知的系统和/或功能,例如包括在车辆2和/或adas或ad系统21的一个或多个电子控制模块ecu和/或节点中,其适配为和/或配置为解释——与车辆2的驾驶相关的——感测信息,以识别例如物体、障碍物、车道、相关标志、适当的导航路径等。例示的感知系统或类似的系统——其可以适配为支持例如传感器融合、跟踪、定位等——因此可
以适配为依靠感知信息。这样的示例性感测信息可以例如从车辆2中包括的和/或搭载的一个或多个——例如公知的——传感器推导出,该传感器适配为感测和/或感知车辆2的行踪和/或环境,其例如由以下中的一个或一个或多个的组合来代表:定位系统22(例如gnss,比如gps)、里程表、惯性测量单元和/或环境检测传感器,比如图像采集装置(例如相机)、雷达、激光雷达、超声波器件等。
21.短语“由路线规划系统执行的方法”可以指“由路线规划系统执行的计算机实施的方法”,而“路线规划系统”可以指“行驶规划系统”、“路线优化系统”和/或“路段选择系统”。另一方面,短语“车辆的路线规划系统”可以指“用于车辆的路线规划系统”、“车辆上搭载的和/或至少部分地包括在车辆中的路线规划系统”,并且根据示例还可以指“至少部分地包括在车辆中和/或至少部分地包括在适配为与所述车辆通信的一个或多个汽车云和/或车外服务器中的路线规划系统”。此外,“用于沿着有待所述车辆行驶的路线进行路段选择”可以指“用于沿着有待所述车辆驾驶的路线进行路段选择”、“用于沿着由所述车辆行驶的路线进行路段选择”和/或“用于在由所述车辆行驶的一个或多个道路的一个或多个道路交叉点处进行路段选择”,并且根据示例还指“用于根据可预定的odd来确定和/或选择有待所述车辆行驶的路段和/或路线”、“用于支持在一个或多个可预定的odd要求内行驶的车辆”和/或“用于支持在符合和/或满足一个或多个可预定的odd要求的情况下行驶的车辆”。
22.路线规划系统1——例如通过车辆位置确定单元101——适配和/或配置为在定位系统22的支持下根据数字地图3来确定车辆2的地理位置。因此,车辆2根据所述数字地图3来进行地理定位,例如被赋予时间戳。因此,可以比如在或基本在有待车辆2行驶的路线(例如车辆远行)的起始处或者在路线正在进行中时建立所述车辆2的当前位置。
23.在定位系统22的支持下根据数字地图3——例如连同时间指示——来确定车辆2的地理位置可以以任意的——例如已知的——方式来实现,潜在地在来自航位推算计算和/或类似方法的附加支持下来实现。定位系统22因此可以由适配为感测和/或确定——比如车辆的——行踪和/或地理位置的任意可行的——例如已知的——传感器和/或功能来代表——例如经由gnss(比如gps)来表示。类似地,数字地图3可以由任意可行的——例如已知的——电子地图来代表,该电子地图包括任意数量的道路、路段4和道路交叉点5——比如道路交叉口、道路出口、道路入口等——根据示例,其可以称为节点5。数字地图3因此可以例如由比如高清晰度hd地图的相对先进的电子地图来代表,或者可替换地由比如包括至少路段4和道路交叉点5的道路网络的图形的较不先进的电子地图来代表。所述数字地图3和/或所述定位系统22可以至少部分地包括在车辆2中——和/或设置搭载在车辆2上,例如与可选的adas或ad系统21、可选的感知系统或以上讨论的类似系统、和/或——例如已知的——可选的导航系统相关联。
24.短语“确定所述车辆的地理位置”可以指“确定所述车辆的位置”、“确定车辆地理位置”和/或“推导出所述车辆的地理位置”,并且根据示例还可以指“确定所述车辆的被赋予和/或包括时间戳和/或时间指示的地理位置”和/或“确定以所述数字地图的xy或xyz坐标表示的所述车辆的地理位置”。另一方面,短语“在定位系统的支持下”可以指“通过来自定位系统的输入”、“来自定位系统”、“在至少定位系统的支持下”和/或“在包括和/或搭载在所述车辆中的定位系统的支持下”。此外,“根据数字地图”可以指“根据数字道路地图”和/或“相对于数字地图”,并且根据示例还可以指“根据实时数字地图”。此外,根据示例,短
语“根据数字地图来确定所述车辆的地理位置”可以指“将所述车辆的地理位置映射到数字地图”。
25.路线规划系统1还——例如通过前方道路识别单元102——适配和/或配置为基于车辆的地理位置在数字地图3中识别车辆正在接近和/或位于的前方道路交叉点51,该前方道路交叉点51包括两个或更多个前方路段41。因此,通过面对数字地图3,沿着车辆2所正在沿着行驶和/或定位的道路或路段4找到了所述车辆2前方的分支成至少两个不同的和/或分离的路段41的道路交叉点51——例如以交叉路口、道路出口或道路入口为代表。
26.前方道路交叉点51和随后其两个或更多个前方路段41可以以任意可行的——例如已知的——方式来识别,比如通过根据和/或相对于数字地图3分析车辆2的地理位置——和/或所述车辆2的行驶方向——来识别。此外,前方道路交叉点51可以由任意的道路交叉点来表示——例如以上通过交叉路口、道路出口和/或道路入口所指示的那样——并且还可以具有任意的可行尺寸和/或在车辆2之前的任意可行距离和/或其地理位置,例如范围从基本0米到数千米或甚至几十公里。类似地,从所述前方道路交叉点51分支的前方路段41可以分别具有任意可行的尺寸,分别沿任意可行的方向行驶,和/或分别具有任意可行的长度,例如仅几米至几千米或甚至几十公里,进一步例如由相应的随后的道路交叉点52限制。
27.短语“识别前方道路交叉点”可以指“确定和/或找到前方道路交叉点”,而“前方道路交叉点”可指“前方的道路交叉点”和/或仅指“道路交叉点”。此外,“基于所述车辆地理位置在所述数字地图中识别前方道路交叉点”可以指“在所述数字地图中识别所述车辆地理位置前方和/或在所述车辆地理位置处的道路交叉点”。另一方面,短语“包括两个或更多个前方路段的前方道路交叉口”可以指“前方道路交叉口分支和/或划分成两个或更多个前方路段”和/或“前方道路交叉口包括两个或更多个前方的分离和/或不同的路段”,而“前方路段”可以指“前方道路区段和/或道路部分”、“前方的道路段和/或仅“路段”。
28.此外,路线规划系统1还——例如通过交通信息推导单元103——适配和/或配置配为推导适用于数字地图3的地图区域的交通信息数据6,该地图区域覆盖包括该两个或更多个前方路段41的多个路段4。由此,路线规划系统1可以获知有关于数字地图3的地理区域——比如城市或城市的一部分——的实时或基本实时的交通信息6——比如当前的交通流量,该地理区域覆盖前方路段41和潜在的其他路段4。因此,可以针对所述区域和/或其路段4、41推导出例如沿着路段4的正在进行的交通堵塞、交通流速、分布和/或例如停放的车辆和/或骑行者的集群等,路线规划系统1可以利用这些来进行评估。
29.交通信息数据6可以以任意可行的——例如已知的——方式导出,比如通过从一个或多个交通信息提供实体和/或系统接收和/或推导交通信息,交通信息提供实体和/或系统以已知的方式收集、编译、呈现、提供和/或广播有关于交通流量的信息。这样的可选交通信息提供实体和/或系统可以相应地如已知的那样从例如一个或多个交通监控摄像机和/或比如移动电话和/或车辆的一个或多个电子设备收集信息,可以单独地或组合地跟踪这些电子设备的位置和/或移动并且有助于交通信息的收集。这种交通信息可以可选地——例如由地图提供商——嵌入电子地图(比如数字地图3)中,然后可以从其推导出交通信息数据6。所述交通信息数据6可以由有关于数字地图3的所述地图区域内的至少覆盖识别出的前方路段41的一个或一个以上路段4的任意可行交通信息代表,比如交通流量信
息。另一方面,地图区域可以由任意尺寸和/或大小的区域代表和/或对应于任意尺寸和/或大小的区域,比如城市和/或乡村区域或其一部分。
30.短语“推导交通信息数据”可以指“接收、读取和/或获取交通信息数据”、“推导交通信息”和/或“从交通信息推导交通信息数据”。所述短语可以进一步指“推导实时或基本实时的交通信息数据”和/或“推导实时或基本实时的交通信息数据”,并且根据示例,还指“推导交通流量信息数据”和/或“在所述数字地图和/或一个或多个交通信息提供实体和/或系统的支持下推导交通信息数据”。此外,“适用于地图区域的交通信息数据”可以指“与地图区域相关和/或有关于地图区域的交通信息数据”,而“所述数字地图的地图区域”可以指“所述数字地图的地理区域”和/或“所述数字地图的一部分”。
31.此外,路线规划系统1还——例如通过路段选择单元104——适配和/或配置为通过经由神经网络馈送有关于交通信息数据6的一个或多个参数和有关于车辆地理位置的一个或多个参数来从两个或更多个前方路段41中选择路段410,该神经网络训练来选择导致一个或多个设定的运行设计域odd要求内的最大行驶范围的路段410。因此,在所述神经网络的支持下,在前方路段41中选择路段410,路段410有助于根据设定的odd要求优化行驶。即,通过在模拟和/或实际交通中训练神经网络,该神经网络使用一个或多个有关于在行驶期间——比如在车辆远行期间——要满足的意向odd要求的参数连同有关于车辆地理位置、数字地图3的地图区域的道路交叉点5和/或路段4、时间点和/或推导出的关于所述时间点的交通信息的参数作为输入,所述神经网络可以训练来根据设定的odd要求来获知针对最大和/或最优行驶——适用于所述地图区域——的路段4选择。因此,通过随后在随着车辆2实时行驶期间——例如在比如以上例示的车辆远行期间——将当前对该地图区域有效的一个或多个交通信息数据参数连同当前有效的一个或多个车辆地理位置参数一起馈送到训练的网络来利用所述训练的网络,输出了和/或可以由此推导出前方路段41中被计算为最佳选项的一个路段410,该最佳选项使得车辆2——如果沿着所选定的路段410行驶——能够在设定的odd要求内使行驶最大化。因此,由于在所介绍的发明构思中考虑到了当前交通情况的动态特性——这在很大程度上可能取决于地理位置、当日时间、周中日期等,可以以有效的方式实现设定的odd要求,尤其是在随着车辆2在与数字地图3的地图区域相对应的地理区域内行驶而连续或间歇地重复所介绍的方法的情况下。
32.在训练神经网络来选择在一个或多个设定的odd要求内导致最大行驶范围的前方路段41的情况下,可以选择选定的前方路段410,因为所述选定前方路段410本身满足(至少在某种程度上)设定的odd要求,和/或在选定路段410之后的一个或多个后续路段42(至少在某种程度上)满足所设置的odd要求。所述神经网络可以由任何可行的机器学习过程和/或机器学习过程表示,所述机器学习过程和/或机器学习过程适于和/或能够被训练来选择导致在一个或多个设定的odd要求内的最大行驶范围的路段410。短语“选择路段”可以指“输出、过滤出和/或精确定位路段”,而在此上下文中“路段”可以指“路段”、“前方路段”和/或“最佳、推荐和/或优选的路段”。另一方面,短语“所述两个或更多个前方路段中的”可以指“来自和/或在所述两个或更多个前方路段中”,而“通过经由神经网络馈送有关于所述交通信息数据的一个或多个参数和有关于所述车辆地理位置的一个或多个参数”可以指“通过利用被输入有关于所述交通信息数据的一个或多个参数和有关于所述车辆地理位置的一个或多个参数的神经网络”和/或“通过将神经网络应用于有关于所述交通信息数据的一
个或多个参数和有关于所述车辆地理位置的一个或多个参数”。此外,在本公开全文中,“一个或多个参数”可以指“一个或多个变量”和/或“至少一个或多个参数”,而全文中的“有关于
……
的一个或多个参数”可以指“关联于、反映、指示、揭示、携带和/或保持
……
的一个或多个参数”。另一方面,短语“有关于所述交通信息数据的参数”可以指“有关于所述交通信息数据的交通信息数据参数”,而在类似的情况下,“有关于所述车辆地理位置的参数”可以指“有关于所述车辆地理位置的车辆地理位置参数”。
33.此外,短语“神经网络”可以指“机器学习过程和/或机器学习过程”,而“训练来选择路段的神经网络”可以指“训练来输出、过滤出和/或精确定位路段的神经网络”和/或“训练来选择前方路段的神经网络”。另一方面,短语“导致最大范围的路段”可以指“允许、支持、导致和/或提供最大范围的路段”,并且进一步指“导致最大程度的满足的路段”。此外,“导致最大的行驶范围”可以指“导致最大的驾驶范围”、“导致最大的行驶效率”和/或“导致高效和/或最高效的行驶”,而“导致一个或多个odd要求内的最大行驶范围”可以指“在符合和/或满足一个或多个odd要求的情况下导致最大的行驶范围”和/或“在一个或多个odd要求内导致最大和/或最优的行驶”。另一方面,短语“一个或多个设定的odd要求”可以指“一个或多个可预定的odd要求”和/或“在训练所述神经网络之前至少部分设定的一个或多个odd要求”。此外,“经训练来选择在一个或一个以上设定的odd要求内导致最大行驶范围的路段”可以指“训练来学习在一个或一个以上设定的odd要求内的最大和/或最佳行驶的路段的选择”,并且根据示例进一步指“训练来基于所述一个或一个以上交通信息参数和所述一个或一个以上车辆地理位置参数选择在一个或多个设定的odd要求内导致最大行驶范围的路段”和/或“训练来提供选择在一个或多个设定的odd要求内导致最大行驶范围的路段的学习策”。
34.一个或多个设定的odd要求可以由任意可行的——例如已知的——odd条件来代表,例如感兴趣的和/或有关的odd条件,以比如在车辆远行期间实现例如为了验证例如主动安全和自主驾驶着手收集现场测试数据。在整个本公开中,odd可以以已知的方式指特定条件,在该特定条件下,比如adas或ad系统21的自动化功能或系统可以设计为起作用和/或适当地运行,例如有关于速度范围、道路类型、比如天气和/或白天/夜间的环境条件、交通限制、地理限制等。因此,odd要求可以例如由车辆速度、高速公路、道路障碍物、交通堵塞、行人过道、道路标志等中的一个或多个来代表。
35.对于任意数量的时间点,可以已经使用有关于数字地图3的地图区域的任意数量的道路交叉点5和路段4的参数作为其输入并且还使用有关于任意数量的历史和/或统计交通信息的参数作为其输入训练神经网络。此外,可以使用任意数量的odd要求作为其输入来训练神经网络。此外,在神经网络的初始训练期间,可以预先确定一个或多个设定odd要求中的至少第一个,比如基础设施相关条件,例如高速公路和/或障碍物,并且将其用作输入。可选地,可以在所述初始训练之后设定所述一个或多个设定的odd要求中的至少第二odd要求——例如环境相关条件,比如车辆速度。此外,在神经网络的使用期间,例如在车辆2在对应于数字地图3的地图区域的区域中行驶期间,例如在如上例示的车辆远行期间,神经网络可以可选地已经连续训练和/或被更新。
36.可选地,路线规划系统1可以例如通过可选的选定路段传输单元105适配和/或配置为将指示选定路段410的数据7通信到车辆显示器23和/或车辆2的adas或ad系统21。由
此,从路线规划系统1传输到车辆2上搭载的一个或多个显示器23和/或传输到车辆2的adas或ad系统(比如,传输到前面示例的adas或ad系统21),数据7反映所选择的前方路段410。可以以任意可行的(例如已知的)方式来实现指示所选路段410的通信数据7,比如直接到车辆显示器23和/或adas或ad系统21,或者到连接到其或与其相关联的控制单元或节点。短语“传输数据”可以指“数字地、电子地、无线地和/或有线地传输数据”和/或“适时地和/或当被认为可行和/或安全时传输数据”,而“数据”可以指“一个或多个信号”和/或“消息”。此外,“指示所述选定路段的数据”可以指“提供、包括、暗示、对应于和/或代表选定路段的数据”。另一方面,车辆显示器23可以由本领域已知的任何一个或多个可行的显示器代表,例如包括在车辆2的仪表板中的数字显示器和/或例如投影在车辆2的挡风玻璃上的平视显示器。替代地,车辆显示器23可以由电子用户设备代表,例如与车辆2配对和/或与车辆2连接的智能电话。短语“车辆显示器”可以指“所述车辆的显示器”和/或“搭载的、至少部分地包括在所述车辆中和/或与所述车辆配对的一个或多个车辆显示器”。
37.进一步可选地,路线规划系统1然后还可以——例如通过可选的选定路段呈现单元106——适配和/或配置为在车辆显示器23的支持下呈现指示选定路段410的信息。由此,可以在车辆显示器23上呈现信息,例如向所述车辆32的乘坐者——例如其驾驶员——通知所选择的前方路段410。因此,通过呈现在所训练的神经网络的支持下选择和/或已经选择了哪个前方路段41,可以指示和/或提示例如驾驶员采取动作和/或实现——即沿着选定的路段410行驶和/或驾驶。呈现指示所选路段410的信息可以以任意可行的(例如已知的)方式来实现,例如通过使用文本(例如,指示所选路段410的字母、标志和/或符号)来呈现所述所选路段410和/或以图形方式来呈现,例如通过在例如所显示的电子地图上高亮、强调、标记和/或以任何其他方式指出选定的路段410。短语“在所述车辆显示器的支持下呈现”可以指“利用所述车辆显示器来呈现”和/或“在所述车辆显示器的支持下提供和/或示出”,而“指示所述选定路段的信息”可以指“包括、暗示、对应于和/或代表选定路段的信息”。此外,“在所述车辆显示信息的支持下呈现指示选定路段的信息”可以指“在所述车辆显示器的支持下呈现从指示选定路段的所述数据推导的指示选定路段的信息”和/或“在所述车辆显示器的支持下基于指示选定路段的所述数据呈现指示选定路段的信息”。
38.附加地或替代地,可选地,路线规划系统1然后还可以——例如通过可选的选定路段启动单元107——适配和/或配置为在adas或ad系统21的支持下启动沿着选定路段410的行驶。因此,adas或ad系统21可以在训练的神经网络的支持下开始动作和/或实现,即,启动沿着前方路段41中的选定路段410的行驶和/或驾驶。在adas或ad系统21的支持下沿着选定路段410行驶的启动可以以任意可行的(例如已知的)方式来实现。此外,短语“在所述adas或ad系统的支持下启动”可以指“利用所述adas或ad系统启动”和/或“在所述adas或ad系统的支持下使能和/或启动”,而“沿着所述选定路段行驶”可以指“选择所述选定路段”、“沿着所述选定路段驾驶”和/或“在所述选定路段上行驶和/或驾驶”。此外,“在所述adas或ad系统的支持下启动沿着所述选定路段行驶”可以指“在所述adas或ad系统的支持下启动沿着从指示选定路段的所述数据推导出的所述选定路段行驶”和/或“基于指示选定路段的所述数据、在所述adas或ad系统的支持下启动沿着所述选定路段的行驶”。
39.可选地,通过经由神经网络馈送来选择路段410可以包括通过在强化学习rl或其等同物或接替物(优选地——例如深度q学习)的支持下训练的神经网络来进行馈送。因此,
由于rl以及随后的q学习和/或深度q学习可以解决比如路线规划优化的复杂优化挑战,可以利用合适并且能够被训练的机器学习过程来提供选择导致一个或多个设定的odd要求内的最大行驶范围的路段410的策略。
40.可以利用以下示例性先决条件来实现本发明的概念:
41.数字地图3的地图区域,识别了所有或基本所有的路段4;
42.相应路段4的交通信息,例如交通流量——以及后续的交通信息数据6;
43.定位系统22,其用于实时地或基本实时地在数字地图3中定位车辆2,其中车辆地理位置例如由xy或xyz坐标代表;
44.作为示例,路段4的平均速度和/或速度限制;
45.在各道路交叉点5中和/或在道路交叉点5处可能采取的动作集合。
46.此外,(比如通过仿真)训练神经网络——在rl的支持下(例如q学习和/或深度q学习)——可以例如利用公知的用于决策建模的马尔科夫决策过程(mdp)已经完成和/或完成,其中其环境可以由在选定位置处的交通情况来表征,并且其中其智能体(agent)可以由与所述环境交互的测试车辆来表征。此外,
47.状态:s是状态的有限集合;
48.a是有限的动作集合,a_s是在状态s可用的动作集合;
49.p_a(s,s')是在时间t在状态s采取动作a将使智能体在时间t 1到达状态s'的概率;
50.r_a(s,s')是在由于动作a而从状态s转换到状态s'之后接收到的即时奖励;
51.γ:控制未来奖励重要性的折扣系数。
52.此外,可以使用和/或使用以下定义:
53.策略:智能体使用策略来选择在不同状态下执行哪个动作,因此其是从状态到动作的映射,通常由符号π表示:
[0054][0055]
状态值函数:通常用v(s)表示。值函数表示智能体处于的状态有多好。其等于从状态s开始并且随后遵循该策略的智能体的预期总奖励。更正式地,我们有(这里奖励r由r_i表示):
[0056][0057]
状态-动作值函数(q函数):其指定智能体在状态下执行给定动作的效果,通常用q(s,a)表示:
[0058][0059]
此外,可以使用和/或使用以下示例性定义中的一个或多个:
[0060]
状态:s=(x,t,n),其中,x是代表智能体位置的向量——比如车辆地理位置——例如纵向和横向,t是代表时间的向量,例如一天中的时间、星期几或日期,并且n是可选的向量,其示出在该状态下每个可能的动作中先前被采取了多少次——例如,在相同路线期间,例如车辆远行期间。假设如果优选独特场景,则n可以是强制性的。此外,可以使用例如
查找表随时间更新和跟踪n;每当在状态s采取动作a时,查找表中的对应字段可以增加1;例如,在学习阶段之后,该表可以是稀疏的,因为大部分道路交叉点5可以不必被访问,并且在被访问的道路交叉点5中的大部分动作可以不必被采取。
[0061]
动作:车辆2或其驾驶员可沿着道路行驶并采取所有安全措施,例如在红绿灯处停车;只要遵循建议的路线,这不会影响智能体奖励。每个状态中的可能动作的总数可以被限制为较小的数目,例如例示八个,例如可以是nw、n、ne、e、es、s、sw、w方向。状态s中的所有物理上可用的动作可以通过接近度的度量映射到该集合;如果动作是不可能的或者不存在于道路交叉点5中和/或道路交叉点5处,则可以将对应的状态值设置为固定的大负数,或者可以将其从用于该状态的可能动作的集合中阻止。
[0062]
奖励:示例性奖励系统可以例如由以下代表:
[0063]
○
如果满足示例性期望速度(即odd要求):
[0064]
■
每x米的加值奖励,例如 1,例如每25米或100米举例说明;这个数目可以例如基于地图区域中的道路交叉点5之间的平均和/或最小距离来决定。
[0065]
■
如果需要独特的场景,则如果相同的路段4被访问多于一次,则可以给予较低的奖励;因此,对于第二次等等,智能体通过该路段-即在状态s采取了相同的动作a-对于每x米,奖励可以计算为 1/n(s,a),其中n(s,a)是先前在状态s采取动作a的次数。对于所有状态和动作,n(s,a)可以被初始化为0,并且可以在查找表中被更新,如上所述。
[0066]
○
如果不满足示例性期望速度(即odd要求):
[0067]
■
每x米的负奖励,例如-1/10。
[0068]
此外,为了学习策略,可以以示例性方式如下使用深度q学习:
[0069]
在数字地图3中确定测试车辆的启动位置。
[0070]
驾驶测试车辆直到接近道路交叉口5。
[0071]
q学习算法训练一个深度神经网络,它将状态s映射到一组状态动作值函数,例如具有8个动作q(s,a_1),...q(s,a_8)。该网络的参数可以由w表示,并且它们可以被初始化为一些随机数。然后可以重复以下步骤:
[0072]
1.根据epsilon-贪婪策略选择动作a_t;
[0073]
a.应用动作后观察奖励r_{t 1}和s_{t 1};
[0074]
b.折扣因子γ可以设定为非常接近1值的数字,以便帮助沿着非奖励路段4导航到可以提供高奖励的地图区域的不同区域;
[0075]
2.将转换s_t、a_t、r_{t 1}、s_{t 1}存储在重放存储器d中;
[0076]
3.从d采样小批的转换(s,a,r,s');
[0077]
4.针对旧参数w_{old}计算q学习目标;
[0078]
5.用随机梯度下降法更新参数w,优化q网络与目标间的mse;
[0079]
6.行驶直至到达下一个道路交叉口5,然后进入步骤1。
[0080]
一旦算法收敛,就可以使用经训练的q网络来获得贪婪策略。
[0081]
根据上文,因此可以学习最优策略(例如,在模拟环境中离线),然后可以实时地使用该学习的策略来建议车辆2应当在道路交叉点5中和/或在道路交叉点5处进入哪个路段4。学习的策略可以进一步用于模拟例如车辆远行,并在实际进行所述车辆远行之前计算预期效率(例如,定义为驾驶和/或行驶的总次数中的odd要求内的公里数),以了解所选区域
或城市是否可以是给定odd要求的令人满意的选择。为此,一旦学习的策略可用,则在仿真中使用数字地图3的地图区域并且例如例示速度信息来驾驶测试车辆。一旦测试车辆已经在odd要求内行驶了预期的公里数,则可以计算效率并且该效率可以用于最终确定远行计划和/或改变远行计划。为了规划新的城市,即数字地图3的其他地图区域,可以使用转移学习来初始化神经网络的参数,使用已经学习的参数,以便更快地学习。
[0082]
图2是示出根据本公开的实施例的示例性路线规划系统1的示意性框图,路线规划系统1包括车辆位置确定单元101、前方道路识别单元102、交通信息推导单元103、路段选择单元104、可选的选定路段传输单元105、可选的选定路段呈现单元106和可选的选定路段启动单元107,以上已经对其全部进行了更详细的描述。此外,本文中用于沿着有待车辆2行驶的路线进行路段选择的实施例可以通过一个或多个处理器(比如处理器108——例如图形处理单元gpu和/或中央处理单元cpu)与用于执行本文的实施例的功能和动作的计算机程序代码一起来实施。所述程序代码也可以被提供为计算机程序产品,例如以数据载体的形式,该数据载体携带用于当被加载到路线规划系统1中时执行本文的实施例的计算机程序代码。一个这样的载体可以是cd rom盘和/或硬盘驱动器的形式,但是其他数据载体也是可行的。此外,计算机程序代码可以作为纯程序代码在服务器上提供并且下载到路线规划系统1,比如例如从车外服务器无线地下载。路线规划系统1可以还包括存储器109,存储器109包括一个或多个存储单元。存储器109可以布置为用来存储例如信息,并且进一步存储数据、配置、调度和应用程序,以在路线规划系统1中被执行时执行本文的方法。例如,计算机程序代码可以在固件中实施、存储在嵌入式处理器108的闪存存储器109中。此外,车辆位置确定单元101、前方道路识别单元102、交通信息推导单元103、路段选择单元104、可选的选定路段传输单元105、可选的选定路段呈现单元106、可选的选定路段启动单元107、可选的处理器108和/或可选的存储器109可以至少部分地包括在车辆2的一个或多个节点110(例如ecu)中,例如在可选的adas或ads系统21中和/或与可选的adas或ads系统21相关联,并且根据示例附加地或替代地至少部分地包括在适配为与所述车辆2通信的一个或多个汽车云和/或车外服务器中。本领域的技术人员还将理解,上述的单元101-107以及任何其他单元、接口、系统、控制器、模块、装置、元件、特征等可以指、包括、包含和/或实施为或由模拟和数字电路的组合和/或配置有软件和/或固件的一个或多个处理器实施,软件和/或固件例如存储在存储器(比如存储器109)中,在由一个或多个处理器(比如处理器108)执行时如本文所述地执行。这些处理器中的一个或多个以及其他数字硬件可以包括在单个专用集成电路asic或若干处理器中,并且各种数字硬件可以分布在若干单独的部件(无论是单独封包还是组装成片上系统soc)之间。
[0083]
图2进一步示出了adas或ad系统21、定位系统22、车辆显示器23、数字地图3、交通信息数据6和指示选定路段410的数据7,以上均已对其全部进行了更详细的讨论。
[0084]
图3是示出1根据本公开的实施例的由路线规划系统执行的示例性方法的流程图。所述方法用于沿着有待车辆2行驶的路线进行路段选择。可以连续重复的示例性方法包括在图1-图2的支持下讨论的以下动作中的一个或多个。而且,在适用的情况下,可以以任何适当的顺序采取动作和/或可以同时和/或以交替的顺序执行一个或多个动作。例如,动作1002和动作1003可以同时和/或以交替顺序执行。
[0085]
动作1001
[0086]
在动作1001中,路线规划系统1在定位系统22的支持下根据数字地图3来确定——例如在车辆位置确定单元101的支持下——车辆2的地理位置。
[0087]
动作1002
[0088]
在动作1002中,路线规划系统1基于车辆的地理位置在数字地图3中识别——例如在前方道路识别单元102的支持下——车辆2正在接近和/或位于的前方道路交叉点51,该前方道路交叉点51包括两个或更多个前方路段41。
[0089]
动作1003
[0090]
在动作1003中,路线规划系统1推导——例如在交通信息推导单元103的支持下——适用于数字地图3的地图区域的交通信息数据6,该地图区域覆盖包括该两个或更多个前方路段41的多个路段4。
[0091]
动作1004
[0092]
在动作1004中,路线规划系统1通过经由神经网络馈送有关于交通信息数据6的一个或多个参数和有关于车辆地理位置的一个或多个参数来从该两个或更多个前方路段41中选择——例如在路段选择单元104的支持下——路段410,该神经网络训练来选择导致一个或多个odd要求内的最大行驶范围的路段410。
[0093]
可选地,通过经由神经网络进行馈送来选择路段410的步骤1004可以包括——和/或路段选择单元104于是可以适配和/或配置为——经由在强化学习rl或其等同物或接替物的支持下训练的神经网络进行馈送。
[0094]
进一步可选地,通过经由神经网络进行馈送来选择路段410的步骤1004然后可以包括——和/或路段选择单元104于是可以适配和/或配置为——经由在为经由在例如深度q学习的支持下训练的神经网络进行馈送。
[0095]
动作1005
[0096]
在可选的动作1005中,路线规划系统1可以将指示选定路段410的数据7传输——例如在可选的选定路段传输单元105的支持下——到车辆显示器23和/或车辆2的adas或ad系统21。
[0097]
动作1006
[0098]
在可选的动作1006中,路线规划系统1然后可以在所述车辆显示器23的支持下确定——例如在可选的选定路段呈现单元106的支持下——指示选定的路段410的信息。
[0099]
动作1006
[0100]
附加地或替代地,在可选的动作1006中,路线规划系统1然后可以进一步在adas或ad系统21的支持下启动——例如,在可选的选定路段启动单元106的支持下——沿着选定路段410的行驶。
[0101]
本领域技术人员意识到,本公开绝不限于上述的优选实施例。相反,在所附权利要求的范围内,许多修改和变化是可能的。此外应注意,附图未必按比例绘制,并且为了清楚起见,可能放大了某些特征的尺寸。相反,重点放在说明本文实施例的原理上。另外,在权利要求中,词语“包括”并不排除其他元件或步骤,而不定冠词“一”或“一个”也不排除多个。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。