1.本发明涉及农业用具领域,尤其涉及一种土地平整用树根清除装置及。
背景技术:
2.在很多果园或者木料林中,当果树或者木料生长到一定的年限后,或者在耕地需要退林还耕时,需要将树木砍掉,种植新的树木或者农作物,但是在种植之前,需要将树根清除掉,一般使用的方式是使用人力进行挖掘,将树根挖出,此种方式效率低下且人员劳动强度很大,因此本发明提出了一种土地平整用树根清除装置,可以通过人员进行操作本装置将树根从土地里面清除,省时省力,且清除速度较快,并且可以将土地进行平整、松软。
技术实现要素:
3.本发明所使用的技术方案是:一种土地平整用树根清除装置,包括安装架和控制系统;所述控制系统包括:控制组件、第一视觉摄像头、第二视觉摄像头和显示屏;所述安装架通过拖拉机后端的液压悬挂装置连接,并通过一号液压缸连接拖拉机后端与安装架上端实现安装架的俯仰角度设置;所述安装架上滑动安装有锤击机构;所述安装架上转动安装有切割装置和平整装置;所述锤击机构位于靠近所述拖拉机一侧;所述切割装置位于所述锤击机构和平整装置之间;所述锤击机构用于锤击树根;所述切割装置用于切割树根;所述平整装置用于平整土地;所述显示屏固定安装在所述拖拉机上;所述第一视觉摄像头和第二视觉摄像头用于将所述安装架底部画面显示在所述显示屏上;所述控制组件用于控制所述锤击机构、切割装置、平整装置和一号液压缸;所述第一视觉摄像头、第二视觉摄像头和显示屏均与所述控制组件电性连接。
4.进一步的,所述锤击机构包括:滑动板和捶打装置;所述滑动板设为两个,分别滑动安装在所述安装架两侧;每个所述滑动板下方均设有至少一个支撑电缸,所述支撑电缸固定安装在所述安装架上,且输出端与所述滑动板固定连接;两个所述滑动板之间固定安装有至少一个与两滑动板均垂直的滑杆;所述捶打装置与每个所述滑杆均滑动连接;两个所述滑动板之间转动安装有与滑杆平行的丝杠,所述捶打装置与所述丝杠螺纹连接;其中任意一个滑动板上固定安装有平移电机,所述平移电机的输出轴与所述丝杠固定连接;每个所述支撑电缸和平移电机均由控制组件进行控制。
5.进一步的,所述捶打装置包括:滑块、摆杆;所述滑块与每个所述滑杆滑动连接,且与所述丝杠啮合连接;所述滑块下端滑动安装有捶打架;所述滑块上固定安装有至少一个移动电缸,每个所述移动电缸输出端均与所述捶打架固定连接;所述捶打架上滑动安装有锤击杆,且转动安装有偏心盘;所述摆杆两端分别与所述偏心盘和锤击杆转动连接;所述捶打架上固定安装有捶打驱动电机,所述捶打驱动电机的输出轴与所述偏心盘固定连接;所述捶打驱动电机与每个所述移动电缸均由所述控制组件进行控制。
6.进一步的,所述切割装置包括:万向传动轴、二号液压缸、切割轮;所述万向传动轴一端与所述拖拉机后侧的输出轴固定连接,另一端固定安装有传动轴;所述传动轴转动安
装在所述安装架上;所述安装架上固定安装有减速器,所述传动轴与所述减速器输入端固定连接;所述安装架与所述拖拉机车轮平行的两侧上各自转动安装有一个切割轮安装架;所述二号液压缸设为两个;每个所述二号液压缸一端分别与对应的所述切割轮安装架转动连接,另一端均与所述安装架转动连接;任意一个所述切割轮安装架的两端分别转动安装有一个链轮,且上端的链轮与所述切割轮安装架的转动轴同轴;两个所述链轮之间通过链条连接;所述切割轮转动安装在两个所述切割轮安装架之间;所述切割轮安装架下端的链轮与所述切割轮固定连接;所述切割轮用于切割树根;所述二号液压缸由所述控制组件进行控制。
7.进一步的,所述平整装置包括:平整犁;所述平整犁转动安装在与所述拖拉机车轮平行的安装架两侧,所述安装架上固定安装有液压马达,所述液压马达输出轴与所述平整犁固定连接;所述液压马达由控制组件进行控制。
8.进一步的,所述平整装置还包括:挡杆;所述平整犁一端固定安装有棘轮;所述挡板一端与所述安装架转动连接,另一端与所述棘轮相抵;使平整犁不可向后转动。
9.进一步的,还包括:插销;所述插销设为两个;所述安装架上竖直滑动安装有两个支撑轮架;每个所述支撑轮架下端均转动安装有一个轮子;每个所述支撑轮架上均设有若干个通孔,所述安装架上设有与所述支撑轮架上的通孔相配合的避空;两个所述插销通过对应的所述避空插入对应的所述通孔将对应的所述支撑轮架与所述安装架固定。
10.进一步的,所述控制组件2包括:微控制器、输入电源模块、锤击机构开闭按钮、锤击机构前移按钮、锤击机构后移按钮、平移电机正转按钮、平移电机反转按钮、支撑电缸升起按钮、支撑电缸下降按钮、声光报警模块;所述微控制器通过输入电源模块与电源电性连接;所述第一视觉摄像头11、第二视觉摄像头12、显示屏13、移动电机424、捶打驱动电机425、支撑电缸45、平移电机46均与所述微控制器电性连接;所述声光报警模块用于当第一视觉摄像头11拍摄到树桩时发出警报;所述锤击机构开闭按钮用于控制捶打驱动电机425的开闭;所述锤击机构前移按钮和锤击机构后移按钮分别控制移动电缸424的前后移动;所述平移电机正转按钮和平移电机反转按钮用于控制平移电机46的正反转;所述支撑电缸升起按钮和支撑电缸下降按钮用于控制所述支撑电缸45的升起和下降;所述控制组件2还包括:一号手动液压阀14、二号手动液压阀15和三号手动液压阀16;所述一号手动液压阀14、二号手动液压阀15和三号手动液压阀16分别用于控制所述一号液压缸7、二号液压缸55和液压马达62。
11.由于本发明采用上述技术方案,本发明具有以下优点:一、本发明由人员驾驶拖拉机在行走的过程中将树根进行清除,大大的提高了清除树根的效率,并且省时省力,减小人员的劳动强度。
12.二、本发明通过切割装置将树根清除,无需人员手动去挖掘树根,省时省力且大大的提高了效率。
13.三、本发明通过锤击机构可在切割装置对树根切割的同时对树根进行锤击,更加快速的将树根清除。
14.四、本发明通过平整装置可将清理过树根后的土地进行平整,无需清理完成后再次平整土地。
15.说明书附图
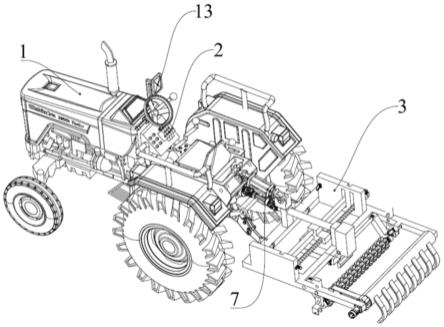
图1为本发明整体结构示意图。
16.图2为本发明部分机构示意图。
17.图3为本发明部分结构另一角度示意图。
18.图4为本发明部分结构底面示意图。
19.图5为本发明锤击机构整体结构示意图。
20.图6为本发明捶打装置整体结构示意图。
21.图7为本发明捶打装置内部结构示意图。
22.图8为本发明锤击杆与偏心盘连接关系示意图。
23.图9为本发明切割装置整体结构示意图。
24.图10为本发明切割轮安装架与链轮连接关系示意图。
25.图11为本发明平整装置整体结构示意图。
26.图12为本发明控制组件结构示意图。
27.图13为本发明控制组件一部分组成示意图。
28.图14为本发明控制组件另一部分组成示意图。
29.附图标记:拖拉机-1;控制组件-2;安装架-3;锤击机构-4;切割装置-5;平整装置-6;一号液压缸-7;支撑轮架-8;轮子-9;插销-10;第一视觉摄像头-11;第二视觉摄像头-12;显示屏-13;滑动板-41;捶打装置-42;滑杆-43;丝杠-44;支撑电缸-45;平移电机-46;万向传动轴-51;传动轴-52;减速器-53;切割轮安装架-54;二号液压缸-55;切割轮-56;链轮-57;链条-58;平整犁-61;液压马达-62;棘轮-63;挡板-64;滑块-421;捶打架-422;锤击杆-423;移动电缸-424;捶打驱动电机-425;偏心盘-426;摆杆-427;一号手动液压阀-14;二号手动液压阀-15;三号手动液压阀-16。
具体实施方式
30.本发明公开了一种土地平整用树根清除装置,下面结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.在本发明的描述中,需要说明的是,术语“上”、“下”、
ꢀ“
前”、“后”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
32.实施例,如图1-14所示,一种土地平整用树根清除装置,包括安装架3和控制系统;控制系统包括:控制组件2、第一视觉摄像头11、第二视觉摄像头12和显示屏13;安装架3通过拖拉机后端的液压悬挂装置连接,并通过一号液压缸7连接拖拉机1后端与安装架3上端实现安装架3的俯仰角度设置;安装架3上滑动安装有锤击机构4;安装架3上转动安装有切割装置5和平整装置6;锤击机构4位于靠近拖拉机一侧;切割装置5位于锤击机构4和平整装置6之间;锤击机构4用于锤击树根;切割装置5用于切割树根;平整装置6用于平整土地;显示屏13固定安装在拖拉机1上;第一视觉摄像头11位于第二视觉摄像头12前端;第一视觉摄
像头11和第二视觉摄像头12用于将安装架3底部画面显示在显示屏13上;控制组件2用于控制锤击机构4、切割装置5、平整装置6和一号液压缸7;第一视觉摄像头11、第二视觉摄像头12和显示屏13均与控制组件2电性连接;第一视觉摄像头11和第二视觉摄像头12的画面分屏显示在显示屏13上;在第一视觉摄像头11拍摄到树桩时,控制组件会发出警报,此时驾驶员通过控制组件2启动切割装置5和锤击机构4,对树根进行切除,观察显示屏13上的第二视觉摄像头12拍摄的画面判断树根是否被切除,当切除完成后,通过平整装置6将树根移动到后方,拖拉机1继续前进;在拖拉机1前进过程中,平整装置6始终对土地进行松软和平整。
33.具体的,如图5-8所示,锤击机构4包括:滑动板41和捶打装置42;滑动板41设为两个,分别安装在安装架3两侧;每个滑动板41下方均设有两个支撑电缸45,支撑电缸45固定安装在安装架3上,且输出端与滑动板41固定连接;两个滑动板41之间固定安装有两个与两滑动板41均垂直的滑杆43;捶打装置42与每个滑杆43均滑动连接;两个滑动板41之间转动安装有与滑杆43平行的丝杠44,捶打装置42与丝杠44螺纹连接;其中一个滑动板41上固定安装有平移电机46,平移电机46的输出轴与丝杠44固定连接;每个支撑电缸45和平移电机46均由控制组件2进行控制,捶打装置42包括:滑块421、摆杆427;滑块421与每个滑杆43滑动连接,且与丝杠44啮合连接;滑块421下端滑动安装有捶打架422;滑块421上固定安装有至少一个移动电缸424,每个移动电缸424输出端均与捶打架422固定连接;捶打架422上滑动安装有锤击杆423,且转动安装有偏心盘426;摆杆427两端分别与偏心盘426和锤击杆423转动连接;捶打架422上固定安装有捶打驱动电机425,捶打驱动电机425的输出轴与偏心盘426固定连接;捶打驱动电机426与每个移动电缸424均由控制组件2进行控制;驾驶员观察显示屏上显示的第二视觉摄像头12显示的画面从而调整捶打装置42的位置;由平移电机46带动丝杠进行旋转,从而使得捶打装置42进行左右移动;由支撑电缸45带动两个滑动板41上下滑动,从而使得捶打装置42进行上下移动;通过移动电缸424控制锤击杆423与树桩的距离,在捶打驱动电机425启动时,偏心盘426进行转动,从而使得锤击杆423进行往复运动,对树桩进行反复的锤击。
34.具体的,如图9-10所示,切割装置5包括:万向传动轴51、二号液压缸55、切割轮56;万向传动轴51一端与拖拉机1后侧的输出轴固定连接,另一端固定安装有传动轴52;传动轴52转动安装在安装架3上;安装架3上固定安装有减速器53,传动轴52与减速器53输入端固定连接;安装架3与拖拉机1车轮平行的两侧上各自转动安装有一个切割轮安装架54;二号液压缸55设为两个;每个二号液压缸55一端分别与对应的切割轮安装架54转动连接,另一端均与安装架3转动连接;任意一个切割轮安装架54的两端分别转动安装有一个链轮57,且上端的链轮57与切割轮安装架54的转动轴同轴;两个链轮57之间通过链条58连接;切割轮56转动安装在两个切割轮安装架54之间;切割轮安装架54下端的链轮57与切割轮56固定连接;切割轮56用于切割树根;二号液压缸55由控制组件2进行控制;由两个二号液压缸55控制切割轮56的升降,由拖拉机1后端的输出轴带动万向传动轴51进行旋转,从而通过减速器53使得切割轮56进行旋转;减速器53可使得切割轮56的扭矩增大,提高清理树桩的效率。
35.具体的,如图11所示,平整装置6包括:平整犁61;平整犁61转动安装在与拖拉机1车轮平行的安装架3两侧,安装架3上固定安装有液压马达62,液压马达62输出轴与平整犁61固定连接;液压马达62由控制组件2进行控制,平整装置6还包括:挡杆64;平整犁61一端固定安装有棘轮63;挡板64一端与安装架3转动连接,另一端与棘轮63相抵;使平整犁61不
可向后转动;在树根被清理完成后,通过液压马达62控制平整犁61旋转,将树根翻转到平整犁61后端,不会对平整犁61犁地造成影响。
36.具体的,如图11所示,还包括:插销10;插销10设为两个;安装架3上竖直滑动安装有两个支撑轮架8;每个支撑轮架8下端均转动安装有一个轮子9;每个支撑轮架8上均设有若干个通孔,安装架3上设有与支撑轮架8上的通孔相配合的避空;两个插销10通过对应的避空插入对应的通孔将对应的支撑轮架8与安装架3固定;拖拉机1在犁地时,通过控制组件2使一号液压缸7将安装架3放下,并使一号液压缸7处于浮动状态,此时平整犁61通过自重进入土地内,因此在拖拉机1启动之前,通过调整支撑轮架8的高度,可对平整犁61犁地的深度进行调整;调节时,将插销10拔出,然后改变支撑轮架8距离地面的高度,调整好之后,将插销10通过安装架3上的避空插入到支撑轮架8上的通孔内,使得支撑轮架8与安装架3之间固定;在犁地过程中,安装架3由拖拉机1进行牵引,通过轮子9在土地上行走,且限制了平整犁61犁地的深度。
37.具体的,如图13所示,控制组件2包括:微控制器、输入电源模块、锤击机构开闭按钮、锤击机构前移按钮、锤击机构后移按钮、平移电机正转按钮、平移电机反转按钮、支撑电缸升起按钮、支撑电缸下降按钮、声光报警模块;所述微控制器通过输入电源模块与电源电性连接;第一视觉摄像头11、第二视觉摄像头12、显示屏13、移动电机424、捶打驱动电机425、支撑电缸45、平移电机46均与微控制器电性连接;第一视觉摄像头11和第二视觉摄像头12监控到画面分屏显示在显示屏13上,并且在第一视觉摄像头11拍摄到树桩时,声光报警模块会发出警报,告知驾驶员;锤击机构开闭按钮用于控制整个捶打驱动电机425的开闭;锤击机构前移按钮和锤击机构后移按钮分别控制移动电缸424的前后移动;平移电机正转按钮和平移电机反转按钮用于控制平移电机46的正反转,从而控制捶打装置42的左右移动;支撑电缸升起按钮和支撑电缸下降按钮用于控制支撑电缸45的升起和下降,从而控制捶打装置42的上下移动。
38.具体的,如图12所示,控制组件2还包括:一号手动液压阀14、二号手动液压阀15和三号手动液压阀16;一号手动液压阀14、二号手动液压阀15和三号手动液压阀16分别控制一号液压缸7、二号液压缸55和液压马达62;通过控制一号液压缸7来控制安装架3的起落;通过控制二号液压缸55来控制切割轮56的上升和下降;通过控制液压马达62来控制平整犁61的翻转。
39.工作原理:在拖拉机1开入土地里之前,首先通过调整支撑轮架8距离地面的高度,从而限制平整犁61犁地的深度;随后将拖拉机1开入需要清除树根的土地,通过一号手动液压阀14控制一号液压缸7将安装架3放下,并使一号液压缸7处于浮动状态,此时平整犁61通过自重进入土地内;在拖拉机1前进的过程中,平整犁61进行犁地,并且可以适应地面的高低起伏,达到更好的犁地效果;在拖拉机1前进的过程中,第一视觉摄像头11和第二视觉摄像头12会将拍摄到的画面分屏显示在显示屏13上,此外当第一视觉摄像头11拍摄到有树桩存在时,声光报警模块会发出警报,告知驾驶员;当第二视觉摄像头12拍摄到树桩时,驾驶员控制拖拉机1进行停车操作;此时,由驾驶员操作二号手动液压阀15控制二号液压缸55使得切割轮56下降,对树根进行切割,由于切割轮56的旋转动力来自于拖拉机1后端的输出轴,因此切割轮56始终保持旋转状态;此外在显示屏13上出现第二视觉摄像头12拍摄到的树桩时;驾驶
员通过操作平移电机正转按钮、平移电机反转按钮、支撑电缸升起按钮、支撑电缸下降按钮、锤击机构前移按钮和锤击机构后移按钮,将锤击杆423对准树桩,对准树桩之后,按下锤击机构开闭按钮,启动捶打驱动电机425,使得锤击杆423不断地进行往复运动,对树桩进行不断的锤击,在切割轮56对树根进行切割的同时锤击杆432不断地对树桩进行锤击,同时在锤击过程中由驾驶员通过锤击机构前移按钮和锤击机构后移按钮调整锤击杆432与树桩之间的距离;当第二视觉摄像头12拍摄到树根已经被清除时,按下锤击机构开闭按钮关闭捶打驱动电机425,并使锤击机构4复位;同时通过二号手动液压阀15控制二号液压缸55使得切割轮56上升;随后启动拖拉机1,在拖拉机1缓慢前行的过程中,通过操作三号手动液压阀16启动液压马达62,使得平整犁61从前向后反转,将树根捞起,并由平整犁61翻转360
°
将树根移动到平整犁61后端,不会影响到拖拉机1的前进;通过棘轮63和挡板64使得平整犁61在拖拉机1前进的过程中,不会有后向前翻转,从而避免了对液压马达62造成损坏。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。