1.本发明涉及一种重物吊装装置及吊装方法,特别是一种能实现重物整体连续大幅度空间角度旋转的吊装装置及其吊装方法。
背景技术:
2.在建筑施工现场,经常要对重物进行吊装,目前,很多重物吊装装置及吊装方法只是对重物进行竖直方向位置的移位,并没有涉及重物在脱空地面或支撑结构的情况下,在不改变吊装点的前提下进行重物的空间角度旋转;由于越来越多的重物是不规则的形状,且安装位置会存在一定的空间角度,常规的吊装角度调整范围有限,无法适应重物的快速连续大幅度空间角度旋转吊装的需要。
3.专利申请公布号为cn107338733a的发明专利申请公开了《一种用于钢箱拱肋空中姿态调整及定位的吊装装置及吊装方法》,该方法虽然可以用于调整重物空中姿态、但还存在以下不足之处:1、吊装方法需要借助额外吊装设备吊钩,且受载荷和场地限制难以实现超高超重吊装;2、通过吊装设备吊钩1整体吊装,重物起吊将载荷转移至吊带和吊钩,柔性吊带3和吊钩1受环境和风载荷影响大易产生晃动,吊装稳定性差;3、千斤顶5之间的距离是固定的,结构重物需事前将姿态调整好,起吊过程中无法实现空中姿态调整;因此无法满足建筑施工的不同需要。
技术实现要素:
4.本发明的目的是提供一种能实现重物整体连续大幅度空间角度旋转的吊装装置及其吊装方法,采用该实现重物整体连续大幅度空间角度旋转的吊装装置不需要增加吊装设备和机具就能实现重物连续大幅度空间角度旋转完成吊装姿态调整和就位;其吊装方法操作简便,灵活,技术效果好。
5.为解决上述问题, 本发明采用的技术方案是: 一种实现重物整体连续大幅度空间角度旋转的吊装装置,包括吊装转向机构、钢结构支撑系统、提升千斤顶组和控制系统;其特征在于:所述吊装转向机构包括上端吊具、转向吊具、钢绞线、固定端锚具;所述钢结构支撑系统包括2条起重横梁,2条纵梁和用于支撑起重横梁及纵梁的门架;所述提升千斤顶组包括n个提升千斤顶61、62
…
6n;所述提升千斤顶组的千斤顶个数n与上端吊具、转向吊具、的组数n相同;所述控制系统包括液压泵站、主控系统;使用状态下,2条纵梁分别固定在门架上,起重横梁安装在纵梁上,并可沿纵梁方向移动,提升千斤顶连同底座可沿起重横梁移动;
提升千斤顶组的n个提升千斤顶分成2组分别安装在两条起重横梁上,钢绞线上端穿过提升千斤顶通过张拉端锚具锚固于固定端锚具上;上端吊具与转向吊具通过销轴方式连接,转向吊具与重物上的吊耳销接连接;上述n的取值范围是:n为大于等于2的偶数。
6.其进一步技术方案是:所述的上端吊具包括吊板、连接筋板ⅰ、上锚垫板、下锚垫板、横向加筋板和转动连接板ⅰ;上锚垫板、下锚垫板位于两块吊板中部,分别与两块吊板固定连接,连接筋板固定在上锚垫板上,转动连接板ⅰ通过横向加筋板与2块吊板固定连接;所述的转向吊具包括耳板、连接耳板、转向吊板和转动连接板ⅱ,耳板和连接耳板与转向吊板一端固定连接,转动连接板ⅱ与转向吊板另一端固定连接,上端吊具的转动连接板ⅰ与转向吊具的转动连接板ⅱ通过销轴连接。
7.相关的另一技术方案是:一种实现重物整体连续大幅度空间角度旋转的吊装方法,其特征在于:它是本发明上述的一种实现重物整体连续大幅度空间角度旋转的吊装装置来实现重物整体连续大幅度空间角度旋转的吊装方法;该方法是在重物垂直向下姿态下在重物结构重心外侧设置吊耳,提升千斤顶组的n个提升千斤顶分成两组分列在两条起重横梁上、每个千斤顶与1组吊装转向机构及1组吊具相连接;钢绞线上端穿过提升千斤顶,通过张拉端锚具锚固,下端穿过上端吊具的锚孔,通过固定端锚具锚固,上端吊具与转向吊具通过销轴方式连接,转向吊具与重物上的吊耳销接连接;提升千斤顶吊装重物由地面或者船舱至半空中,根据重物就位姿态变化改变起重横梁或纵梁方向上相邻提升千斤顶之间的平面间距,并相应改变提升千斤顶的钢绞线的吊装高度,通过改变重物吊耳之间水平投影距离x或y以及吊耳与吊点之间吊索高度h,最终实现重物连续大幅度空间角度旋转完成吊装姿态调整再就位,上述n的取值范围是:n为大于等于2的偶数。
8.进一步技术方案是:所述的一种实现重物整体连续大幅度空间角度旋转的吊装方法的具体步骤如下:a、吊装前准备:a1:安装钢结构支撑系统:将纵梁固定在门架上,起重横梁跨过重物支撑在纵梁上,并可沿纵梁方向移动,以及提升千斤顶可沿起重横梁方向移动;a2、安装千斤顶、吊装转向机构:在重物结构重心外侧设置吊耳,提升千斤顶分成两组分列在两条起重横梁上、每个提升千斤顶与1组吊装转向机构相连接;钢绞线上端穿过提升千斤顶、通过张拉端锚具锚固,钢绞线下端穿过上端吊具的锚孔,通过固定端锚具锚固,上端吊具与转向吊具通过销轴方式连接,转向吊具与重物上的吊耳销接连接,准备就绪;b、吊装:b1、吊装准备:控制系统控制油压泵站同步驱动n台提升千斤顶反复张拉钢绞线将重物提升脱离地面或船舱;b2、根据需要调整拟吊装重物姿态:根据重物安装姿态单台或多台提升千斤顶张拉钢绞线改变吊装高度垂直投影高度——即通过实现各吊点钢绞线不同长度,同时调整起重横梁上的提升千斤顶之间的沿横
梁和纵梁方向水平间距,此时转向吊具根据重物重心自动沿销轴旋转改变空中姿态,旋转过程中钢绞线始终保持竖直向下,即通过改变重物吊耳之间水平投影距离x或y以及吊耳与吊点之间吊索高度h,从而实现重物连续大幅度空间角度旋转完成吊装姿态调整;b3、吊装到位:在调整好重物吊装姿态下同步提升,提升过程中,若需要调整重物吊装姿态,还可以重复步骤b2重新调整。
9.在上述吊装方法的a2、安装千斤顶、吊装转向机构步骤中,千斤顶的安装方式是:提升千斤顶分成两组分列在两条起重横梁上,重物两侧分别设置n/2个提升千斤顶、将与起重横梁垂直的方向同侧的提升千斤顶作为一组。
10.再进一步技术方案:所述实现任意角度α旋转的具体方法是:将提升千斤顶划分为4个吊点,对应的编号1#、2#、3#、4#吊点,其中1#吊点提升千斤顶ⅰ、3#吊点提升千斤顶ⅲ不动作,吊装高度不变,2#吊点提升千斤顶ⅱ、4#吊点提升千斤顶ⅳ同步往上张拉钢绞线改变吊装高度即吊点与吊耳之间吊索高度h,使得重物在转向吊具带动下沿转向吊具转轴旋转α度,此时各吊点转向吊具转轴也随之旋转角度α、改变重物姿态,旋转过程中钢绞线始终保持竖直向下,即通过改变重物吊耳之间水平投影距离x或y以及吊点与吊耳之间吊索高度h,从而实现在吊装过程中重物任意空间角度α旋转完成吊装姿态调整和就位,上述α的取值范围是:0
°
≤α≤90
°
。
11.由于采取以上技术方案,本发明之一种实现重物整体连续大幅度空间角度旋转的吊装装置及其吊装方法具有以下特点和有益效果:1、本发明之一种实现重物整体连续大幅度空间角度旋转的吊装装置结构简单、操作方便,灵活,安全和技术效果好:采用本发明装置进行重物吊装过程中,当需要对重物进行空间角度旋转的高空姿态调整时,通过改变吊装点之间相对平面间距和改变吊装点的吊装钢绞线相对长度,从而实现重物空间任意角度旋转,最终实现重物连续大幅度空间角度旋转完成吊装姿态调整和就位,而不需要增加吊装设备和机具,经济效果好;其操作简便、灵活、安全;技术效果好。
12.2、与背景技术所述专利申请公布号为cn107338733a、发明名称为《一种用于钢箱拱肋空中姿态调整及定位的吊装装置及吊装方法》的专利申请(以下简称:背景技术所述专利申请)相比,有以下优点:
①
装置结构不同:本发明的之一种实现重物整体连续大幅度空间角度旋转的吊装装置的吊装转向机构、钢结构支撑系统与背景技术所述专利申请的装置的结构不同,本发明申请的吊装转向机构上端吊具1、转向吊具2、钢绞线9和固定端锚具,上端吊具1和转向吊具2通过两个销轴与结构重物连接,是实现重物空中旋转调整的主要结构;所述钢结构支撑系统包括2条起重横梁5,2条纵梁7和用于支撑起重横梁及纵梁的门架,能充分保证吊装稳定性。
13.②
本专利申请一种实现重物整体连续大幅度空间角度旋转的吊装方法与背景技术所述专利申请的吊装方法有以下不同:a、背景技术所述专利申请的吊装方法需要借助额外吊装设备吊钩,且受载荷和场地限制难以实现超高超重吊装;本专利申请吊装方法不需要借助额外的起重吊装设备和吊钩,不需要再增加其他动力源,且不受环境场地影响,完全可以实现超高超重的吊装;
b、背景技术所述专利申请的吊装方法,通过吊装设备吊钩1整体吊装,重物起吊将载荷转移至吊带和吊钩,柔性吊带3和吊钩1受环境和风载荷影响大易产生晃动,吊装稳定性差;而本专利吊装方法是利用地基基础安装纵横梁和门架,整个结构是刚性结构,吊装稳定性好;c、背景技术所述专利申请的吊装方法千斤顶5之间的距离是固定的,结构重物需事前将姿态调整好,起吊过程中无法实现空中姿态调整;而本专利吊装方法可以实现千斤顶吊点间水平面内距离的调整变化,起吊过程中可以任意实现空中姿态调整,可以灵活应用于不规则复杂的结构重物吊装,吊装精度高;综上所述:本专利吊装方法与背景技术所述专利申请的吊装方法比较,能连续实现空间角度旋转的高空姿态调整,具有吊装重量大、超高、稳定、灵活、精度高、无需增加额外动力源或者吊装设备吊钩等特点,效果明显。
14.下面,结合附图和实施例对本发明之一种实现重物整体连续大幅度空间角度旋转的吊装装置及其吊装方法的技术特征作进一步的说明。
附图说明
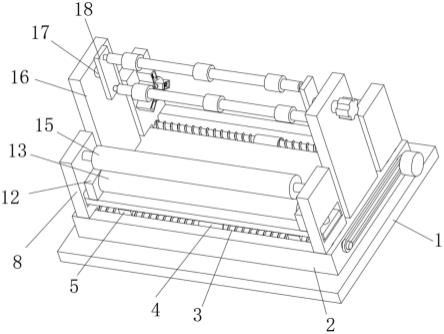
15.图1-1是本发明之实现重物整体连续大幅度空间角度旋转的吊装装置的整体结构示意图(吊装前准备阶段);图1-2:重物吊耳布置示意图(图1去掉钢结构支撑系统后的俯视图);图1-3:吊点之间重物x向、y向投影示意图;图1-4:重物吊耳布置示意图(立体图);图2-1是本发明之一种可实现重物整体连续大幅度空间角度旋转的装置旋转45
°
状态图;图2-2:逆时针旋转45
°
状态下重物吊耳位置示意图;图2-3:逆时针旋转45
°
状态下吊点之间重物x向、y向投影示意图;图2-4:逆时针旋转45
°
状态下重物吊耳位置示意图(立体图);图3-1是本发明之一种可实现重物整体连续大幅度空间角度旋转的装置旋转90
°
状态图;图3-2:逆时针旋转90
°
状态下重物吊耳位置示意图;图3-3:逆时针旋转90
°
状态下吊点之间重物x向、y向投影示意图;图3-4:逆时针旋转90
°
状态下重物吊耳位置示意图(立体图);图4是上端吊具的结构示意图;图5是转向吊具的结构示意图;图6是千斤顶和张拉端锚具锚固状态(图1-1之a部放大示意图);图7是转向吊具旋转的结构示意图(图2-1之b部放大示意图);图8是上端吊具与转向吊具连接状态示意图之一(立体图);图9是上端吊具与转向吊具连接状态示意图之二(立体图);图10是钢结构支撑系统整体结构及吊点、千斤顶安装状态示意图;图11-1、图11-2是本发明之一种可实现重物整体连续大幅度空间角度旋转的装置拟作顺时针旋转状态示意图(2#、4#不动,1#、3#顶上升);
图11-1:重物吊耳、吊点布置示意图(立体图);图11-2吊点之间重物x向、y向投影示意图;图12-1~图12-3是本发明之一种可实现重物整体连续大幅度空间角度旋转的装置拟作顺时针旋转吊点布置示意图(1#、2#不动, 3#、4#顶上升)。;图12-1:重物吊耳、吊点布置示意图(立体图);图12-2:吊点之间重物x向、y向投影示意图;图12-3:重物翻转示意图。
16.图中:1-上端吊具,101-吊板,102-连接筋板ⅰ,103-上锚垫板,104-下锚垫板,105-横向加筋板,106-转动连接板ⅰ;2-转向吊具,201-耳板,202-连接耳板,203-转向吊板,204-转动连接板ⅱ;3-重物,4-吊耳,5-起重横梁,6-提升千斤顶, 61-提升千斤顶ⅰ、62-提升千斤顶ⅱ、63-提升千斤顶ⅲ, 64-提升千斤顶ⅳ;7-纵梁,8-门架;9-钢绞线,10-固定端锚具,11-张拉端锚具,12-销轴,13-液压泵站,14-主控系统。
17.α-旋转角度,α1-45
°
,α2-90
°
;x-重物吊耳之间x轴向水平投影距离, y-重物吊耳之间y 轴向水平投影距离,h-重物吊耳与吊点之间吊索高度;x1-逆时针旋转45
°
状态下重物吊耳之间x轴向水平投影距离,y1-逆时针旋转45
°
状态下重物吊耳之间y轴向水平投影距离,h1-逆时针旋转45
°
状态下重物吊耳与吊点之间吊索高度;x2-逆时针旋转90
°
状态下重物吊耳之间x轴向水平投影距离,y2-逆时针旋转90
°
状态下重物吊耳之间y轴向水平投影距离,h2-逆时针旋转90
°
状态下重物吊耳与吊点之间吊索高度;1#、2#、3#、4#——吊点;cdef——代表被转重物的一个面;图中箭头表示重物旋转方向。
具体实施方式
18.实施例一:一种实现重物整体连续大幅度空间角度旋转的吊装装置:如图1-1~图3-4所示,该实现重物整体连续大幅度空间角度旋转的吊装装置包括吊装转向机构,钢结构支撑系统,提升千斤顶组和控制系统;所述吊装转向机构包括上端吊具1、转向吊具2、钢绞线9、固定端锚具10和张拉端锚具11;所述钢结构支撑系统包括2条起重横梁5,2条纵梁7和用于支撑起重横梁5及纵梁7的门架8;所述提升千斤顶组包括n个提升千斤顶61、62
…
6n,一般用4个,对于超大超重物体可以增加;所述提升千斤顶组的千斤顶个数n与上端吊具1、转向吊具2的组数n相同;所述的控制系统包括液压泵站13、主控系统14;
使用状态下,2条纵梁7分别固定在门架8上,起重横梁5安装在纵梁7上,并可沿纵梁7方向移动,提升千斤顶6连同底座可沿起重横梁5移动;提升千斤顶组的n个提升千斤顶分成2组分别安装在两条起重横梁5上,钢绞线9上端穿过提升千斤顶6通过张拉端锚具11锚固,钢绞线9下端穿过上端吊具1之上锚垫板上的锚孔,通过固定端锚具10锚固,钢绞线9也称为吊索;上端吊具1的转动连接板ⅰ106与转向吊具2的转动连接板ⅱ205通过销轴方式连接,转向吊具2与重物3上的吊耳4销接连接;上述n的取值范围是:n为大于等于2的偶数。
19.如图4所示,所述的上端吊具1包括吊板ⅰ101、连接筋板ⅰ102、上锚垫板103、下锚垫板104、横向加筋板105和转动连接板ⅰ106,上锚垫板103、下锚垫板104位于两块吊板101中部,分别与两块吊板101固定连接,连接筋板102固定在上锚垫板上,转动连接板ⅰ106通过横向加筋板105与2块吊板ⅰ101固定连接;如图5所示,所述的转向吊具2包括耳板201、连接耳板202、转向吊板203和转动连接板ⅱ204,耳板201和连接耳板202与转向吊板203一端固定连接,转动连接板ⅱ204与转向吊板203另一端固定连接,上端吊具1的转动连接板ⅰ106与转向吊具2的转动连接板ⅱ204通过销轴连接方式连接。
20.实施例二:一种实现重物整体连续大幅度空间角度旋转的吊装方法:它是利用实施例一所述一种实现重物整体连续大幅度空间角度旋转的吊装装置来实现重物整体连续大幅度空间角度旋转的吊装方法;该方法是在重物3结构重心外侧设置吊耳4(图1-1、图2-1、图3-1中是在重物3垂直向下姿态下在重心外侧四周互为90度位置设置吊耳4),提升千斤顶组的4个提升千斤顶分成两组分列在两条起重横梁5上、每个千斤顶与1组吊装转向机构及1组吊具相连接;钢绞线9上端穿过提升千斤顶6,通过张拉端锚具11锚固,下端穿过上端吊具1的锚孔,通过固定端锚具10锚固,上端吊具1与转向吊具2通过销轴方式连接,转向吊具2与重物3上的吊耳4销接连接;提升千斤顶6吊装重物3由地面或者船舱至半空中,根据重物就位姿态变化改变起重横梁5或纵梁7方向上相邻提升千斤顶6之间的平面间距,并相应改变提升千斤顶6的钢绞线9的吊装高度,从而改变重物3吊耳之间水平投影距离x或y以及吊耳与吊点之间吊索高度h以实现重物3空间角度旋转,最终实现重物3连续大幅度空间角度旋转完成吊装姿态调整再就位。
21.该方法的具体步骤如下:a、吊装前准备:a1:安装钢结构支撑系统:将两条纵梁7固定在门架8上,两条起重横梁5跨过重物3支撑在纵梁7上,并可沿纵梁7轴向方向移动,提升千斤顶6可沿起重横梁5移动;a2、安装千斤顶、吊装转向机构:在重物3结构重心外侧设置吊耳4,提升千斤顶分成两组分列在两条起重横梁5上、每个提升千斤顶与1组吊装转向机构相连接;钢绞线9上端穿过提升千斤顶6、通过张拉端锚具11锚固,钢绞线9下端穿过上端吊具1之上锚垫板103上的锚孔,通过固定端锚具10锚固,
上端吊具1与转向吊具2通过销轴方式连接,转向吊具2的连接耳板202与重物3上的吊耳4销接连接,准备就绪;b、吊装:b、吊装:b1、吊装准备:控制系统控制油压泵站同步驱动n台提升千斤顶6反复张拉钢绞线将重物提升脱离地面或船舱(参见图1-1);b2、根据需要调整拟吊装重物姿态:根据重物3安装姿态单台或多台提升千斤顶6张拉钢绞线9改变吊装高度——即通过实现各吊点钢绞线不同长度,同时调整起重横梁5上的提升千斤顶6之间的沿横梁和纵梁方向水平间距,此时转向吊具2根据重物3重心自动沿销轴旋转改变空中姿态,旋转过程中钢绞线始终保持竖直向下,即通过改变重物3吊耳之间水平投影距离x或y以及吊耳与吊点之间吊索高度h,从而实现重物3连续大幅度空间角度旋转完成吊装姿态调整;b3、吊装到位:在调整好重物吊装姿态下控制系统再控制油压泵站同步驱动n台提升千斤顶6反复张拉钢绞线将重物同步提升,提升过程中,若需要调整重物吊装姿态,还可以重复步骤b2重新调整。
22.在步骤a2中,千斤顶的安装方式是:提升千斤顶分成两组分列在两条起重横梁5上,在重物两侧分别设置n/2个提升千斤顶6,将与起重横梁5垂直的方向同侧的提升千斤顶6作为一组。
23.下面,以将吊装重物逆时针旋转45度为例说明所述的一种实现重物整体连续大幅度空间角度旋转的吊装方法实现逆时针45度角旋转的具体方法是:如图2-1~图2-4所示,将提升千斤顶安装在两条起重横梁上,吊点编号为1#、2#、3#、4#位,其中1#吊点提升千斤顶ⅰ、3#吊点提升千斤顶ⅲ63不动作、吊装高度不变,2#吊点提升千斤顶ⅱ62、4#吊点提升千斤顶ⅳ64同步往上张拉钢绞线改变吊装高度,使得重物3在转向吊具带动下沿转向吊具2转轴旋转,同时1#吊点转向吊具2转轴也随之旋转角度45度、改变重物3姿态,旋转过程中钢绞线始终保持竖直向下,纵向距离y不变,通过改变重物3吊耳之间沿横梁水平投影距离x1以及吊耳与吊点之间吊索高度h1,从而实现在吊装过程中重物3在空间逆时针旋转45度完成吊装姿态调整和就位。
24.同样的连接方式,实现重物整体连续大幅度空间角度旋转的吊装方法实现逆时针旋转90度角的具体方法如图3-1~图3-4所示,其中1#吊点提升千斤顶ⅰ61、3#吊点提升千斤顶ⅲ63不动作、吊装高度不变, 2#吊点提升千斤顶ⅱ62、4#吊点提升千斤顶ⅳ64同步往上张拉钢绞线改变吊装高度h2,使得重物3在转向吊具带动下沿转向吊具2转轴逆时针旋转,此时各吊点转向吊具2转轴也随之逆时针旋转90度、改变重物3姿态,旋转过程中钢绞线始终保持竖直向下,纵向距离y不变,通过改变重物3吊耳之间沿横梁水平投影距离x2以及吊耳与吊点之间吊索高度h2,从而实现在吊装过程中重物3在空间逆时针旋转90度完成吊装姿态的调整和就位。
25.作为本发明上述实施例的一种变换,本发明实现重物整体连续大幅度空间角度旋转的吊装方法也可以实现重物逆时针旋转任意角度α,其具体方法是:固定某两个千斤顶不
动作、例如固定1#吊点提升千斤顶ⅰ61、3#吊点提升千斤顶ⅲ63不动作,吊装高度不变,当改变2#吊点提升千斤顶ⅱ、4#吊点提升千斤顶ⅳ64同步往上张拉钢绞线改变吊装高度——即吊点与吊耳之间吊索高度h,使得重物3在转向吊具带动下沿转向吊具2转轴旋转,此时各吊点转向吊具2转轴也随之旋转α角度、改变重物3姿态,旋转过程中钢绞线始终保持竖直向下,同步往上张拉钢绞线改变吊装高度即吊点与吊耳之间吊索高度h,使得重物3在转向吊具带动下沿转向吊具2转轴旋转α度,此时各吊点转向吊具2转轴也随之旋转角度α、改变重物3姿态,旋转过程中钢绞线始终保持竖直向下,即通过改变重物3吊耳之间水平投影距离xm、或ym以及吊点与吊耳之间吊索高度hm,从而实现在吊装过程中重物3在任意空间角度α旋转完成吊装姿态调整和就位,上述α的取值范围是:0
°
≤α≤90
°
;xm、ym、hm的取值范围根据重物旋转角度而定,其计算方法本领域技术人员根据现有技术能够作出,此处不再赘述。
26.作为本发明实施例的一种变换,也可以采取保持2#吊点提升千斤顶ⅱ62、4#吊点提升千斤顶ⅳ64不动作,重物吊耳之间水平投影距离x不变,而1#吊点提升千斤顶ⅰ61、3#吊点提升千斤顶ⅲ63同步往上张拉钢绞线改变吊装高度——即吊点与吊耳之间吊索高度hm,从而实现在吊装过程中重物3在顺时针方向任意空间旋转α度,上述的取值范围是:0
°
≤α≤90
°
(参见图11-1、图11-2)。
27.作为本发明实施例的一种变换,也可以采用其中1#吊点提升千斤顶ⅰ61、2#吊点提升千斤顶ⅱ62不动作,吊耳之间纵向水平投影距离y不变, 3#吊点提升千斤顶ⅲ63、4#吊点提升千斤顶ⅳ64同步往上张拉钢绞线改变吊装高度——即吊点与吊耳之间吊索高度hm,使得重物3在转向吊具带动下沿转向吊具2转轴旋转;其吊装方法原理一样,此处不再赘述(参见图12-1、图12-2、图12-3)。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。