1.本技术涉及无人机领域,具体涉及一种无人机集群的编号方法、装置、电子设备及存储介质。
背景技术:
2.在多架无人机协同表演之前,需要对每架无人机进行编号,保证每架无人机编号独一无二,进而使得特定编号的无人机按照特定的飞行路线进行表演。现有技术中,先对场地进行标点操作,进而把无人机摆放到所标点位上,进而根据无人机所在点位为无人机分配编号。这一过程中,标点操作通常需要花费大量人力以及时间,而且容易出错,导致无人机编号效率较低。
技术实现要素:
3.本技术的一个目的在于提出一种无人机集群的编号方法、装置、电子设备及存储介质,能够提高无人机集群的编号效率。
4.根据本技术实施例的一方面,公开了一种无人机集群的编号方法,所述方法包括:从无人机集群中选取桩机,并获取所述桩机的经纬度信息、高度信息以及磁角度信息;获取所述无人机集群中其他无人机的经纬度信息以及高度信息;根据所述桩机的经纬度信息、所述桩机的高度信息、所述其他无人机的经纬度信息和所述其他无人机的高度信息,获取在以所述桩机为原点的大地坐标系中所述其他无人机的第一坐标;根据所述桩机的磁角度信息,将所述其他无人机的第一坐标转换至以所述桩机为原点的舞台坐标系中的第二坐标;根据所述其他无人机的第二坐标,将目标编号分配至所述无人机集群中各无人机。
5.根据本技术实施例的一方面,公开了一种无人机集群的编号装置,所述装置包括:桩机信息获取模块,配置为从无人机集群中选取桩机,并获取所述桩机的经纬度信息、高度信息以及磁角度信息;其他无人机信息获取模块,配置为获取所述无人机集群中其他无人机的经纬度信息以及高度信息;第一坐标获取模块,配置为根据所述桩机的经纬度信息、所述桩机的高度信息、所述其他无人机的经纬度信息和所述其他无人机的高度信息,获取在以所述桩机为原点的大地坐标系中所述其他无人机的第一坐标;第二坐标获取模块,配置为根据所述桩机的磁角度信息,将所述其他无人机的第一坐标转换至以所述桩机为原点的舞台坐标系中的第二坐标;编号分配模块,配置为根据所述其他无人机的第二坐标,将目标编号分配至所述
无人机集群中各无人机。
6.根据本技术实施例的一方面,公开了一种电子设备,包括:一个或多个处理器;存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述电子设备实现上述各种可选实现方式中提供的方法。
7.根据本技术实施例的一方面,公开了一种计算机程序介质,其上存储有计算机可读指令,当所述计算机可读指令被计算机的处理器执行时,使计算机执行上述各种可选实现方式中提供的方法。
8.根据本技术实施例的一个方面,提供了一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。计算机设备的处理器从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该计算机设备执行上述各种可选实现方式中提供的方法。
9.本技术实施例中,通过根据桩机的磁角度信息将在以桩机为原点的大地坐标系中其他无人机的第一坐标转换至以桩机为原点的舞台坐标系中的第二坐标,进而根据其他无人机的第二坐标对无人机集群分配目标编号,使得为无人机集群分配的目标编号自动且准确契合以桩机为原点的舞台坐标系,从而提高了无人机集群的编号效率。
10.本技术的其他特性和优点将通过下面的详细描述变得显然,或部分地通过本技术的实践而习得。
11.应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本技术。
附图说明
12.通过参考附图详细描述其示例实施例,本技术的上述和其它目标、特征及优点将变得更加显而易见。
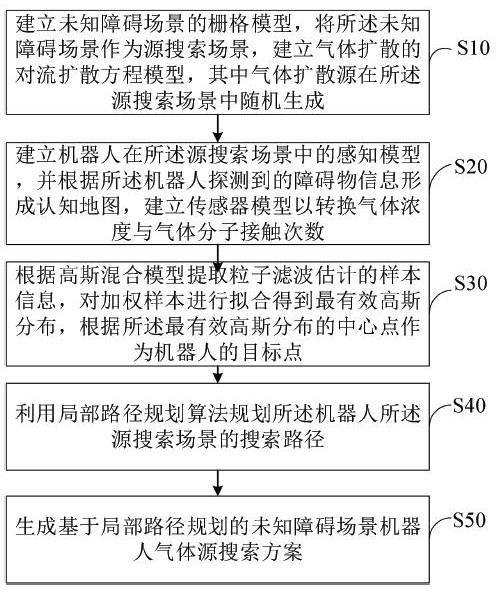
13.图1示出了根据本技术一个实施例的无人机集群的编号方法流程图。
14.图2示出了根据本技术一个实施例的大地坐标系与舞台坐标系之间的位置示意图。
15.图3示出了根据本技术一个实施例的无人机集群的预期目标编号示意图。
16.图4示出了根据本技术一个实施例的无人机集群的位置分布示意图。
17.图5示出了根据本技术一个实施例的按照图3所示的预期目标编号,为图4所示的无人机集群分配目标编号的分配结果示意图。
18.图6示出了根据本技术一个实施例的按照图3所示的预期目标编号,为图4所示的无人机集群分配目标编号的示意图。
19.图7示出了根据本技术一个实施例的按照图3所示的预期目标编号,为图4所示的无人机集群分配目标编号的示意图。
20.图8示出了根据本技术一个实施例的按照图3所示的预期目标编号,为图4所示的无人机集群分配目标编号的示意图。
21.图9示出了根据本技术一个实施例的按照图3所示的预期目标编号,为图4所示的无人机集群分配目标编号的示意图。
22.图10示出了根据本技术一个实施例的按照图3所示的预期目标编号,为图4所示的
无人机集群分配目标编号的示意图。
23.图11示出了根据本技术一个实施例的按照图3所示的预期目标编号,为图4所示的无人机集群分配目标编号的示意图。
24.图12示出了根据本技术一个实施例的位置分布呈三角形的无人机集群示意图。
25.图13示出了根据本技术一个实施例的无人机集群的编号装置框图。
26.图14示出了根据本技术一个实施例的电子设备硬件图。
具体实施方式
27.现在将参考附图更全面地描述示例实施方式。然而,示例实施方式能够以多种形式实施,且不应被理解为限于在此阐述的范例;相反,提供这些示例实施方式使得本技术的描述将更加全面和完整,并将示例实施方式的构思全面地传达给本领域的技术人员。附图仅为本技术的示意性图解,并非一定是按比例绘制。图中相同的附图标记表示相同或类似的部分,因而将省略对它们的重复描述。
28.此外,所描述的特征、结构或特性可以以任何合适的方式结合在一个或更多示例实施方式中。在下面的描述中,提供许多具体细节从而给出对本技术的示例实施方式的充分理解。然而,本领域技术人员将意识到,可以实践本技术的技术方案而省略所述特定细节中的一个或更多,或者可以采用其它的方法、组元、步骤等。在其它情况下,不详细示出或描述公知结构、方法、实现或者操作以避免喧宾夺主而使得本技术的各方面变得模糊。
29.附图中所示的一些方框图是功能实体,不一定必须与物理或逻辑上独立的实体相对应。可以采用软件形式来实现这些功能实体,或在一个或多个硬件模块或集成电路中实现这些功能实体,或在不同网络和/或处理器装置和/或微控制器装置中实现这些功能实体。
30.本技术提供了一种无人机集群的编号方法,可以用于在无人机集群表演前对各个无人机进行编号,各个无人机的编号相互独立,进而各个无人机按照编号所对应的特定飞行路径进行飞行表演。
31.在详细描述本技术的具体实施过程之前,对本技术所涉及的部分概念进行简要解释。
32.桩机,指的是在编号过程中用于编号参考的无人机。桩机可以是参与飞行表演的无人机,也可以是不参与飞行表演仅用于编号参考的无人机。
33.大地坐标系,指的是大地测量中以参考椭球面为基准面建立起来的坐标系。
34.舞台坐标系,指的是以无人机集群所在舞台为基准建立起来的坐标系。其中,舞台指的是无人机在进行飞行表演或者在进行其他活动(例如:物资投放、救援搜索等)时的活动区域。
35.图1示出了本技术一实施例的无人机集群的编号方法流程图,该方法的执行主体示例性地可以为能够与无人机集群中各个无人机建立通信的地面控制站。该方法包括:步骤s110、从无人机集群中选取桩机,并获取桩机的经纬度信息、高度信息以及磁角度信息;步骤s120、获取无人机集群中其他无人机的经纬度信息以及高度信息;步骤s130、根据桩机的经纬度信息、桩机的高度信息、其他无人机的经纬度信息和
其他无人机的高度信息,获取在以桩机为原点的大地坐标系中其他无人机的第一坐标;步骤s140、根据桩机的磁角度信息,将其他无人机的第一坐标转换至以桩机为原点的舞台坐标系中的第二坐标;步骤s150、根据其他无人机的第二坐标,将目标编号分配至无人机集群中各无人机。
36.本技术实施例中,可以随机选取无人机集群中的一个无人机作为桩机;也可以选取无人机集群中的预设位置的一个无人机作为桩机。
37.获取桩机的经纬度信息、高度信息以及磁角度信息。其中,桩机的经纬度信息中的经度信息记为e0,纬度信息记为n0;桩机的高度信息记为u0;桩机的磁角度信息记为yaw。其中,桩机的磁角度信息可由桩机负载的磁罗盘提供。
38.获取无人机集群中除桩机以外的其他无人机的经纬度信息以及高度信息。其中,其他无人机的经纬度信息中的经度信息记为e,纬度信息记为n;其他无人机的高度信息记为u。
39.经纬度信息和高度信息均是在大地坐标系中测量得到的数据。因此,将桩机作为大地坐标系的原点时,可以根据e0,n0,u0,e,n,u,获取其他无人机在以桩机为原点的大地坐标系中的第一坐标。其他无人机的第一坐标的x轴坐标记为x_earth;其他无人机的第一坐标的y轴坐标记为y_earth;其他无人机的第一坐标的z轴坐标记为z_earth;x轴与y轴均平行于地面,z轴垂直于地面。
40.考虑到大地坐标系的x轴与y轴的方向一般是固定的(一般情况下,大地坐标系的x轴为东西方向,y轴为南北方向),而观众通常会在任意位置观看无人机集群的飞行表演,因此以观众所在区域为舞台区域,根据桩机的磁角度信息yaw,将其他无人机的第一坐标(x_earth,y_earth,z_earth)转换至以桩机为原点的舞台坐标系的第二坐标(x_stage,y_stage,z_stage)。x_stage为其他无人机的第二坐标的x轴坐标;y_stage为其他无人机的第二坐标的y轴坐标;z_stage为其他无人机的第二坐标的z轴坐标。
41.进而根据其他无人机的第二坐标(x_stage,y_stage,z_stage),将目标编号分配至无人机集群中各无人机。由于目标编号是以其他无人机的第二坐标为依据分配的,而其他无人机的第二坐标契合以桩机为原点的舞台坐标系,因此分配的目标编号同样契合以桩机为原点的舞台坐标系,使得无人机集群能够以规范的初始姿态,将后续的飞行表演完善地呈现给舞台区域的观众。
42.由此可见,本技术实施例中,通过根据桩机的磁角度信息将在以桩机为原点的大地坐标系中其他无人机的第一坐标转换至以桩机为原点的舞台坐标系中的第二坐标,进而根据其他无人机的第二坐标对无人机集群分配目标编号,使得为无人机集群分配的目标编号自动且准确契合以桩机为原点的舞台坐标系,从而提高了无人机集群的编号效率。
43.并且,本技术实施例避免了每次无人机集群飞行表演之前都需要通过人工手动在无人机上粘贴编号贴纸,节省了人力;还避免了每次无人机集群飞行表演结束,都必须严格按照无人机的编号顺序收取无人机(例如:0至9号无人机放在0号箱子,10至19号无人机放在1号箱子,以方便下次飞行表演使用)。原因在于,本技术实施例对于无人机的摆放位置容错率大,无需人工精准维护无人机的摆放间距。即使无人机的摆放间距存有一些误差,本技术实施例依然能够准确快速地分配目标编号,从而使得无需每次飞行表演都要将各无人机
按照上次飞行表演的位置严格摆放,省去了人工在表演场地使用测量尺进行标点的工作,节省了飞行表演前的准备时间。
44.在一实施例中,从位于无人机集群的边缘的无人机中,选取桩机。
45.该实施例中,将位于无人机集群的边缘的一个无人机作为桩机。具体的,可以在表演场地随机选取一个无人机然后将其摆放在无人机集群的边缘(所选取无人机可以是参与表演的无人机,也可以是不参与表演的无人机)。进而地面控制站记录该无人机的位置,并将该无人机作为桩机。
46.相比于将位于无人机集群的内部区域的一个无人机作为桩机,将位于无人机集群的边缘的一个无人机作为桩机,减少了坐标正负转换的处理过程。
47.进一步的,将位于无人机集群的边缘角落的一个无人机作为桩机。例如:将位于无人机集群的边缘左下角的无人机作为桩机。相比于将位于无人机集群的边缘的一个无人机作为桩机,将位于无人机集群的边缘角落的一个无人机作为桩机,进一步减少了坐标正负转换的处理过程。
48.在一实施例中,控制其他无人机的机头与桩机的机头朝向平行且方向相同。
49.该实施例中,选取桩机后,将无人机集群所有参与表演的其他无人机上电,控制其他无人机的机头与桩机的机头朝向平行且方向相同,并控制相邻无人机之间的距离,以保证相邻无人机的桨叶在起飞时不会相互碰撞。
50.该实施例的优点在于,无人机飞行的控制需要涉及向量运算,无人机的机头朝向即为向量方向,通过控制其他无人机的机头与桩机的机头朝向平行且方向相同,避免了向量运算过程中对于向量方向的调整,节省了计算资源。
51.在一实施例中,根据桩机的经纬度信息以及其他无人机的经纬度信息,获取桩机与其他无人机之间的经纬度差值。根据桩机的高度信息以及其他无人机的高度信息,获取桩机与其他无人机之间的高度差值。根据经纬度差值和高度差值,计算得到其他无人机的第一坐标。
52.该实施例中,桩机与其他无人机之间的经度差值为(e-e0),纬度差值为(n-n0),高度差值为(u-u0)。进而可以采用rtk(real time kinematic,载波相位差分)技术,根据(e-e0),(n-n0),(u-u0),根据以下公式计算得到其他无人机的第一坐标(x_earth,y_earth,z_earth)。
53.x_earth=(e-e0)*p*cos(n*π/180)y_earth=(n-n0)*pz_earth=u-u0其中,p为赤道上的换算系数。p=π/180*r,r为地球半径,单位为米。p的经验值为111195米。
54.该实施例的优点在于,通过rtk技术计算得到各个其他无人机的第一坐标,能够将定位误差减小至厘米级,矫正gps(global positioning system,全球定位系统)定位坐标,从而避免了gps定位误差偏大而导致编号会出现重复的问题。
55.在一实施例中,根据桩机的磁角度,计算大地坐标系与舞台坐标系之间的夹角。根据大地坐标系与舞台坐标系之间的夹角,采用矩阵旋转的方式将其他无人机的第一坐标转换至舞台坐标系中的第二坐标。
56.该实施例中,参考图2所示的大地坐标系与舞台坐标系之间的位置示意图。大地坐标系的x轴记为xe轴,大地坐标系的y轴记为ye轴;舞台坐标系的x轴记为xs轴,舞台坐标系的y轴记为ys轴。大地坐标系与舞台坐标系之间的夹角记为yaw_correct。根据桩机的磁角度yaw计算得到yaw_correct后,根据如下所示公式,采用矩阵选择的方式将其他无人机的第一坐标(x_earth,y_earth,z_earth)转换至物体坐标系中的第二坐标(x_stage,y_stage,z_stage)。
57.x_stage=x_earth*cos(yaw_correct)-y_earth*sin(yaw_correct)y_stage=x_earth*sin(yaw_correct) y_earth*cos(yas_correct)z_stage=z_earth在一实施例中,获取无人机集群所在场地的地磁偏角。将桩机的磁角度与地磁偏角之和作为大地坐标系与舞台坐标系之间的夹角。
58.具体的,记无人机集群所在场地的地磁偏角为yaw_bias,进而将yaw与yaw_bias之和作为yaw_correct。
59.在一实施例中,将目标编号分配至桩机,并从桩机开始,将最新分配有目标编号的无人机作为基准无人机。根据其他无人机的第二坐标,不断遍历与基准无人机距离最近的其他无人机,并将目标编号分配至基准无人机距离最近的其他无人机,直到将目标编号分配至无人机集群中各无人机。
60.具体的,将预先确定属于桩机d0的目标编号分配至桩机d0,并将桩机d0作为基准无人机。
61.基准无人机为桩机d0时,根据其他无人机的第二坐标,遍历与桩机距离最近的其他无人机d1,将目标编号分配至其他无人机d1,并将基准无人机更新为其他无人机d1。
62.基准无人机为其他无人机d1时,根据其他无人机的第二坐标,遍历与其他无人机d1距离最近的其他无人机d2,将目标编号分配至其他无人机d2,并将基准无人机更新为其他无人机d2。
63.以此类推,不再赘述目标编号分配的其他同理过程。
64.图3示出了本技术一实施例的无人机集群的预期目标编号示意图。
65.参考图3所示,该实施例中,xs以及ys为舞台坐标系中平行于地面的两个坐标轴。边缘加粗的圆为桩机,其他圆为其他无人机。预期中所有无人机等间距地排列为一个呈矩形的5*5矩阵。并且桩机的目标编号为1,从桩机开始按照从左往右从下往上的顺序依次将其他无人机的目标编号加1,得到如图3所示的无人机集群的预期目标编号。
66.图4示出了本技术一实施例的无人机集群的位置分布示意图。
67.参考图4所示,该实施例中,xs以及ys为舞台坐标系中平行于地面的两个坐标轴。边缘加粗的圆为桩机,其他圆为其他无人机。由图4可见,相邻无人机的间距并不完全相等,所有无人机排列为一个呈近似矩形的矩阵。造成这种情况的原因通常为摆放无人机所存在的操作误差。
68.图5示出了本技术一实施例的按照图3所示的预期目标编号,为图4所示的无人机集群分配目标编号的分配结果示意图。
69.图6至图8示出了本技术一实施例的按照图3所示的预期目标编号,为图4所示的无人机集群分配目标编号的示意图。
70.参考图6至图8,按照图3所示的预期目标编号遍历无人机集群的过程如下所示:将桩机编号为1号机,并将1号机作为基准无人机。
71.基准无人机为1号机时,将沿xs轴方向遍历到的距离1号机最近的其他无人机编号为2号机,将沿ys轴方向遍历到的距离1号机最近的其他无人机编号为6号机。并将基准无人机更新为2号机与6号机。
72.基准无人机为2号机与6号机时,将沿xs轴方向遍历到的距离2号机最近的其他无人机编号为3号机,将沿ys轴方向遍历到的距离2号机最近的其他无人机编号为7号机,将沿ys轴方向遍历到的距离6号机最近的其他无人机编号为11号机。并将基准无人机更新为3号机、7号机与11号机。
73.基准无人机为3号机、7号机与11号机时,将沿xs轴方向遍历到的距离3号机最近的其他无人机编号为4号机,将沿ys轴方向遍历到的距离3号机最近的其他无人机编号为8号机,将沿ys轴方向遍历到的距离7号机最近的其他无人机变化为12号机,将沿ys轴方向遍历到的距离11号机最近的其他无人机编号为16号机。并将基准无人机更新为4号机、8号机、12号机、16号机。
74.以此类推,不再赘述后续遍历过程。
75.图9至图11示出了本技术一实施例的按照图3所示的预期目标编号,为图4所示的无人机集群分配目标编号的示意图。
76.参考图9至图11,按照图3所示的预期目标编号遍历无人机集群的过程如下所示:将桩机编号为1号机,并将1号机作为基准无人机。
77.基准无人机为1号机时,将沿xs轴方向遍历到的距离1号机最近的其他无人机编号为2号机,将沿ys轴方向遍历到的距离1号机最近的其他无人机编号为6号机。并将基准无人机更新为2号机与6号机。
78.基准无人机为2号机与6号机时,将沿xs轴方向遍历到的距离2号机最近的其他无人机编号为3号机,将沿ys轴方向遍历到的距离2号机最近的其他无人机编号为7号机。并将基准无人机更新为6号机、7号机、3号机。
79.基准无人机为6号机、7号机与3号机时,将沿xs轴方向遍历到的距离3号机最近的其他无人机编号为4号机,将沿ys轴方向遍历到的距离3号机最近的其他无人机编号为8号机。并将基准无人机更新为6号机、7号机、8号机与4号机。
80.基准无人机为6号机、7号机、8号机与4号机时,将沿xs轴方向遍历到的距离4号机最近的其他无人机编号为5号机,将沿ys轴方向遍历到的距离4号机最近的其他无人机编号为9号机。并将基准无人机更新为6号机、7号机、8号机、9号机与5号机。
81.基准无人机为6号机、7号机、8号机、9号机与5号机时,将沿ys轴方向遍历到的距离5号机最近的其他无人机编号为10号机。并将基准无人机更新为6号机、7号机、8号机、9号机与10号机。
82.基准无人机为6号机、7号机、8号机、9号机与10号机时,将沿ys轴方向遍历到的距离6号机最近的其他无人机编号为11号机,将沿ys轴方向遍历到的距离7号机最近的其他无人机编号为12号机,将沿ys轴方向遍历到的距离8号机最近的其他无人机编号为13号机,将沿ys轴方向遍历到的距离9号机最近的其他无人机编号为14号机,将沿ys轴方向遍历到的距离10号机最近的其他无人机编号为15号机。并将基准无人机更新为11号机、12号机、13号
机、14号机与15号机。
83.以此类推,不再赘述后续遍历过程。
84.需要说明的是,图3至图11示出的位置分布呈矩形或呈近似矩形的无人机集群只是示意性的,并不代表本技术仅适用于对位置分布呈矩形或呈近似矩形的无人机集群进行编号。本技术所提供方法不仅能够用于对位置分布呈矩形或呈近似矩形的无人机集群进行编号,还能够用于对位置分布呈其他形状(例如:三角形,近似三角形,圆形,近似圆形,五边形,近似五边形等)的无人机集群进行编号。具体的,图12示出了本技术一实施例的位置分布呈三角形的无人机集群示意图,按照本技术所提供方法同样能够对该无人机集群进行编号。
85.在一实施例中,根据所述无人机集群中各无人机的通信标识,与所述无人机集群中各无人机建立无线通信,并通过无线通信将所分配目标编号发送至所述无人机集群中各无人机。
86.该实施例中,各个无人机有着独立的通信标识。无人机的通信标识包括无人机的mac(media access control)地址和ip(internet protocol address,网际协议)地址。因此地面控制站可以根据预设的网络协议,基于通信标识与对应无人机建立无线通信,将目标编号发送至对应无人机,并通过改号指令指示对应无人机修改自身的编号。从而无人机接收到改号指令后,修改自身的编号。
87.该实施例的优点在于,地面控制站通过无线通信的方式可以同时向所有无人机发送所分配目标编号,避免了通过数据线与各个无人机相连分配目标编号所消耗的人力以及时间。
88.图13示出了根据本技术一实施例的无人机集群的编号装置框图,所述装置包括:桩机信息获取模块210,配置为从无人机集群中选取桩机,并获取所述桩机的经纬度信息、高度信息以及磁角度信息;其他无人机信息获取模块220,配置为获取所述无人机集群中其他无人机的经纬度信息以及高度信息;第一坐标获取模块230,配置为根据所述桩机的经纬度信息、所述桩机的高度信息、所述其他无人机的经纬度信息和所述其他无人机的高度信息,获取在以所述桩机为原点的大地坐标系中所述其他无人机的第一坐标;第二坐标获取模块240,配置为根据所述桩机的磁角度信息,将所述其他无人机的第一坐标转换至以所述桩机为原点的舞台坐标系中的第二坐标;编号分配模块250,配置为根据所述其他无人机的第二坐标,将目标编号分配至所述无人机集群中各无人机。
89.在本技术的一示例性实施例中,所述桩机信息获取模块配置为:从位于所述无人机集群的边缘的无人机中,选取所述桩机。
90.在本技术的一示例性实施例中,所述第一坐标获取模块配置为:根据所述桩机的经纬度信息以及所述其他无人机的经纬度信息,获取所述桩机与所述其他无人机之间的经纬度差值;根据所述桩机的高度信息以及所述其他无人机的高度信息,获取所述桩机与所述其他无人机之间的高度差值;
根据所述经纬度差值和所述高度差值,计算得到所述其他无人机的第一坐标。
91.在本技术的一示例性实施例中,所述第二坐标获取模块配置为:根据所述桩机的磁角度,计算所述大地坐标系与所述舞台坐标系之间的夹角;根据所述大地坐标系与所述舞台坐标系之间的夹角,采用矩阵旋转的方式将所述其他无人机的第一坐标转换至所述舞台坐标系中的第二坐标。
92.在本技术的一示例性实施例中,所述第二坐标获取模块配置为:获取无人机集群所在场地的地磁偏角;将所述桩机的磁角度与所述地磁偏角之和作为所述大地坐标系与所述舞台坐标系之间的夹角。
93.在本技术的一示例性实施例中,所述编号分配模块配置为:将目标编号分配至所述桩机,并从所述桩机开始,将最新分配有目标编号的无人机作为基准无人机;根据所述其他无人机的第二坐标,不断遍历与所述基准无人机距离最近的其他无人机,并将目标编号分配至所述基准无人机距离最近的其他无人机,直到将目标编号分配至所述无人机集群中各无人机。
94.在本技术的一示例性实施例中,所述编号分配模块配置为:根据所述无人机集群中各无人机的通信标识,与所述无人机集群中各无人机建立无线通信,并通过无线通信将所分配目标编号发送至所述无人机集群中各无人机。
95.下面参考图14来描述根据本技术实施例的电子设备30。图14显示的电子设备30仅仅是一个示例,不应对本技术实施例的功能和使用范围带来任何限制。
96.如图14所示,电子设备30以通用计算设备的形式表现。电子设备30的组件可以包括但不限于:上述至少一个处理单元310、上述至少一个存储单元320、连接不同系统组件(包括存储单元320和处理单元310)的总线330。
97.其中,所述存储单元存储有程序代码,所述程序代码可以被所述处理单元310执行,使得所述处理单元310执行本说明书上述示例性方法的描述部分中描述的根据本发明各种示例性实施方式的步骤。例如,所述处理单元310可以执行如图1中所示的各个步骤。
98.存储单元320可以包括易失性存储单元形式的可读介质,例如随机存取存储单元(ram)3201和/或高速缓存存储单元3202,还可以进一步包括只读存储单元(rom)3203。
99.存储单元320还可以包括具有一组(至少一个)程序模块3205的程序/实用工具3204,这样的程序模块3205包括但不限于:操作系统、一个或者多个应用程序、其它程序模块以及程序数据,这些示例中的每一个或某种组合中可能包括网络环境的实现。
100.总线330可以为表示几类总线结构中的一种或多种,包括存储单元总线或者存储单元控制器、外围总线、图形加速端口、处理单元或者使用多种总线结构中的任意总线结构的局域总线。
101.电子设备30也可以与一个或多个外部设备400(例如键盘、指向设备、蓝牙设备等)通信,还可与一个或者多个使得用户能与该电子设备30交互的设备通信,和/或与使得该电子设备30能与一个或多个其它计算设备进行通信的任何设备(例如路由器、调制解调器等等)通信。这种通信可以通过输入/输出(i/o)接口350进行。输入/输出(i/o)接口350与显示单元340相连。并且,电子设备30还可以通过网络适配器360与一个或者多个网络(例如局域
网(lan),广域网(wan)和/或公共网络,例如因特网)通信。如图所示,网络适配器360通过总线330与电子设备30的其它模块通信。应当明白,尽管图中未示出,可以结合电子设备30使用其它硬件和/或软件模块,包括但不限于:微代码、设备驱动器、冗余处理单元、外部磁盘驱动阵列、raid系统、磁带驱动器以及数据备份存储系统等。
102.通过以上的实施方式的描述,本领域的技术人员易于理解,这里描述的示例实施方式可以通过软件实现,也可以通过软件结合必要的硬件的方式来实现。因此,根据本技术实施方式的技术方案可以以软件产品的形式体现出来,该软件产品可以存储在一个非易失性存储介质(可以是cd-rom,u盘,移动硬盘等)中或网络上,包括若干指令以使得一台计算设备(可以是个人计算机、服务器、终端装置、或者网络设备等)执行根据本技术实施方式的方法。
103.在本技术的示例性实施例中,还提供了一种计算机可读存储介质,其上存储有计算机可读指令,当所述计算机可读指令被计算机的处理器执行时,使计算机执行上述方法实施例部分描述的方法。
104.根据本技术的一个实施例,还提供了一种用于实现上述方法实施例中的方法的程序产品,其可以采用便携式紧凑盘只读存储器(cd-rom)并包括程序代码,并可以在终端设备,例如个人电脑上运行。然而,本发明的程序产品不限于此,在本文件中,可读存储介质可以是任何包含或存储程序的有形介质,该程序可以被指令执行系统、装置或者器件使用或者与其结合使用。
105.所述程序产品可以采用一个或多个可读介质的任意组合。可读介质可以是可读信号介质或者可读存储介质。可读存储介质例如可以为但不限于电、磁、光、电磁、红外线、或半导体的系统、装置或器件,或者任意以上的组合。可读存储介质的更具体的例子(非穷举的列表)包括:具有一个或多个导线的电连接、便携式盘、硬盘、随机存取存储器(ram)、只读存储器(rom)、可擦式可编程只读存储器(eprom或闪存)、光纤、便携式紧凑盘只读存储器(cd-rom)、光存储器件、磁存储器件、或者上述的任意合适的组合。
106.计算机可读信号介质可以包括在基带中或者作为载波一部分传播的数据信号,其中承载了可读程序代码。这种传播的数据信号可以采用多种形式,包括但不限于电磁信号、光信号或上述的任意合适的组合。可读信号介质还可以是可读存储介质以外的任何可读介质,该可读介质可以发送、传播或者传输用于由指令执行系统、装置或者器件使用或者与其结合使用的程序。
107.可读介质上包含的程序代码可以用任何适当的介质传输,包括但不限于无线、有线、光缆、rf等等,或者上述的任意合适的组合。
108.可以以一种或多种程序设计语言的任意组合来编写用于执行本发明操作的程序代码,所述程序设计语言包括面向对象的程序设计语言—诸如java、c 等,还包括常规的过程式程序设计语言—诸如“c”语言或类似的程序设计语言。程序代码可以完全地在用户计算设备上执行、部分地在用户设备上执行、作为一个独立的软件包执行、部分在用户计算设备上部分在远程计算设备上执行、或者完全在远程计算设备或服务器上执行。在涉及远程计算设备的情形中,远程计算设备可以通过任意种类的网络,包括局域网(lan)或广域网(wan),连接到用户计算设备,或者,可以连接到外部计算设备(例如利用因特网服务提供商来通过因特网连接)。
109.应当注意,尽管在上文详细描述中提及了用于动作执行的设备的若干模块或者单元,但是这种划分并非强制性的。实际上,根据本技术的实施方式,上文描述的两个或更多模块或者单元的特征和功能可以在一个模块或者单元中具体化。反之,上文描述的一个模块或者单元的特征和功能可以进一步划分为由多个模块或者单元来具体化。
110.此外,尽管在附图中以特定顺序描述了本技术中方法的各个步骤,但是,这并非要求或者暗示必须按照该特定顺序来执行这些步骤,或是必须执行全部所示的步骤才能实现期望的结果。附加的或备选的,可以省略某些步骤,将多个步骤合并为一个步骤执行,以及/或者将一个步骤分解为多个步骤执行等。
111.通过以上的实施方式的描述,本领域的技术人员易于理解,这里描述的示例实施方式可以通过软件实现,也可以通过软件结合必要的硬件的方式来实现。因此,根据本技术实施方式的技术方案可以以软件产品的形式体现出来,该软件产品可以存储在一个非易失性存储介质(可以是cd-rom,u盘,移动硬盘等)中或网络上,包括若干指令以使得一台计算设备(可以是个人计算机、服务器、移动终端、或者网络设备等)执行根据本技术实施方式的方法。
112.本领域技术人员在考虑说明书及实践这里公开的发明后,将容易想到本技术的其它实施方案。本技术旨在涵盖本技术的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本技术的一般性原理并包括本技术未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本技术的真正范围和精神由所附的权利要求指出。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。