1.本实用新型涉及轴承领域,具体涉及一种工业机器人用圆锥滚子轴承。
背景技术:
2.随着工业机器人产业的快速发展,对工业机器人核心部件之一的轴承也提出了更高的要求。其中工业机器人大量常用了非标的小尺寸圆锥滚子轴承,且对轴承的承载能力、动摩擦力矩、使用寿命等性能参数均有较高的要求。而采用现有轴承结构进行单纯的尺寸缩放无法实现工业机器人用轴承的性能需求。因此需要对轴承结构进行创新,提供一种可以适应工业机器人使用的圆锥滚子轴承。
技术实现要素:
3.本实用新型要解决的技术问题是提供一种工业机器人用圆锥滚子轴承,可以提高承载能力。
4.为了解决上述技术问题,本实用新型提供的技术方案如下:一种工业机器人用圆锥滚子轴承,包括内圈、外圈、滚动体和保持架,所述的内圈设有外沟道,所述的外圈设有内沟道;所述的内沟道和外沟道分别沿轴向平分为大端分段和小端分段,其中的大端分段与滚动体的大端对应,小端分段与滚动体的小端对应;所述的内沟道和/或外沟道的底面设有凸度,且凸度最高点位于大端分段。
5.凸度设计可以提高内圈和/或外圈的承载能力,根据实践证明,圆锥滚子轴承的载荷集中点位于大端分段,凸度最高点设置在大端分段可以更好的适应载荷分布情况。
6.作为优选,所述滚动体的表面设有凸度,且凸度的最高点与内沟道和/或外沟道的大端分段对应。
7.作为优选,所述的内沟道和/或外沟道底面的凸度为5
µ
m~10
µ
m。
8.作为优选,所述外沟道的两端分别设有挡边,至少其中一个挡边的端面为圆弧面。挡边设置成圆弧面,可以减小挡边与滚动体之间的接触面积,从而减小摩擦力矩。
9.作为优选,所述内沟道底面与挡边之间设有过渡槽,所述的过渡槽与内沟道底面、挡边分别圆角过渡,可以减小应力集中,提高结构强度。
10.作为优选,与滚动体大端对应的挡边为大端挡边,所述大端挡边的厚度为t,所述轴承内圈的厚度为b,则有t/b=28%~29%。
11.作为优选,所述外圈的外径为d,内圈的内径为d,滚动体的直径为dw,则有:dw/(d-d)=27.7%~28.77%。
12.作为优选,所述的保持架上设有与滚动体一一对应的窗孔,每一所述窗孔的至少一个周向侧边设有缺口。缺口的设置可以减小滚动体与窗孔的接触面积,从而减小摩擦,提高滚动体的使用寿命,降低摩擦力矩。同时润滑油脂也可以从缺口进入,增强润滑效果。
13.作为优选,所述窗孔的两个周向侧面分别设有缺口。
14.作为优选,所述缺口的长度为s,所述滚动体的长度为l,则有:s/l=0.6~0.8。
附图说明
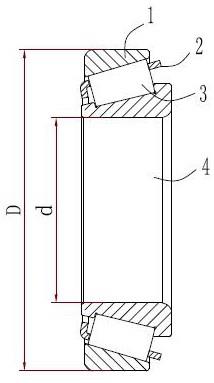
15.图1为本实施例工业机器人用圆锥滚子轴承的结构示意图;
16.图2为本实施例工业机器人用圆锥滚子轴承中滚动体的结构示意图;
17.图3为本实施例工业机器人用圆锥滚子轴承中内圈的结构示意图;
18.图4为图3中a处的局部放大图;
19.图5为本实施例工业机器人用圆锥滚子轴承的局部示意图;
20.图6为图5中e处的局部放大图;
21.图7为本实施例工业机器人用圆锥滚子轴承中保持架的结构示意图;
22.图8为图7中c处的局部放大图。
具体实施方式
23.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
实施例
24.如图1和图2所示,一种工业机器人用圆锥滚子轴承,包括内圈4、外圈1、滚动体3和保持架2。所述外圈1的外径为d,内圈4的内径为d,滚动体3的直径为dw,则有:dw/(d-d)=27.7%~28.77%。其中滚动体3的直径dw以滚动体3的最大直径为准。
25.如图3和图4所示,所述的内圈4设有外沟道41,所述的外圈1设有内沟道。所述的内沟道和外沟道41分别沿轴向平分为大端分段51和小端分段52,其中的大端分段51与滚动体3的大端对应,小端分段52与滚动体3的小端对应。所述的内沟道和/或外沟道41的底面设有凸度,且凸度最高点位于大端分段51,优选形式为内沟道和外沟道41的底面均设置凸度。本实施例附图中以外沟道为例具体说明。具体的,所述的内沟道和/或外沟道41底面的凸度为5
µ
m~10
µ
m。
26.凸度设计可以提高内圈4和外圈1的承载能力,根据实践证明,圆锥滚子轴承的载荷集中点位于大端分段51,凸度最高点设置在大端分段51可以更好的适应载荷分布情况。
27.如图2所示,进一步的,所述滚动体3的表面设有凸度,且凸度的最高点与内沟道和/或外沟道41的大端分段51对应。
28.如图5和图6所示,所述外沟道的两端分别设有挡边42,至少其中一个挡边42的端面为圆弧面,优选两个挡边42的端面均为圆弧面。挡边42设置成圆弧面,可以减小挡边42与滚动体3之间的接触面积,从而减小摩擦力矩。所述内沟道底面与挡边42之间设有过渡槽43,所述的过渡槽43与内沟道底面、挡边42分别圆角过渡,可以减小应力集中,提高结构强度。与滚动体3大端对应的挡边42为大端挡边,所述大端挡边的厚度为t,所述轴承内圈4的厚度为b,则有t/b=28%~29%。
29.如图7和图8所示,所述的保持架2上设有与滚动体3一一对应的窗孔31,每一所述窗孔31的至少一个周向侧边设有缺口311。缺口311的设置可以减小滚动体3与窗孔31的接触面积,从而减小摩擦,提高滚动体3的使用寿命,降低摩擦力矩。同时润滑油脂也可以从缺口311进入,增强润滑效果。具体的,所述窗孔31的两个周向侧面分别设有缺口311。所述缺
口311的长度为s,所述滚动体3的长度为l,则有:s/l=0.6~0.8。
30.总之,以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种工业机器人用圆锥滚子轴承,包括内圈、外圈、滚动体和保持架,所述的内圈设有外沟道,所述的外圈设有内沟道;其特征在于:所述的内沟道和外沟道分别沿轴向平分为大端分段和小端分段,其中的大端分段与滚动体的大端对应,小端分段与滚动体的小端对应;所述的内沟道和/或外沟道的底面设有凸度,且凸度最高点位于大端分段。2.根据权利要求1所述的圆锥滚子轴承,其特征在于:所述滚动体的表面设有凸度,且凸度的最高点与内沟道和/或外沟道的大端分段对应。3.根据权利要求1所述的圆锥滚子轴承,其特征在于:所述的内沟道和/或外沟道底面的凸度为5
µ
m~10
µ
m。4.根据权利要求1所述的圆锥滚子轴承,其特征在于:所述外沟道的两端分别设有挡边,至少其中一个挡边的端面为圆弧面。5.根据权利要求4所述的圆锥滚子轴承,其特征在于:所述内沟道底面与挡边之间设有过渡槽,所述的过渡槽与内沟道底面、挡边分别圆角过渡。6.根据权利要求4所述的圆锥滚子轴承,其特征在于:与滚动体大端对应的挡边为大端挡边,所述大端挡边的厚度为t,所述轴承内圈的厚度为b,则有t/b=28%~29%。7.根据权利要求1所述的圆锥滚子轴承,其特征在于:所述外圈的外径为d,内圈的内径为d,滚动体的直径为dw,则有:dw/(d-d)=27.7%~28.77%。8.根据权利要求1-7中任一项所述的圆锥滚子轴承,其特征在于:所述的保持架上设有与滚动体一一对应的窗孔,每一所述窗孔的至少一个周向侧边设有缺口。9.根据权利要求8所述的圆锥滚子轴承,其特征在于:所述窗孔的两个周向侧面分别设有缺口。10.根据权利要求8所述的圆锥滚子轴承,其特征在于:所述缺口的长度为s,所述滚动体的长度为l,则有:s/l=0.6~0.8。
技术总结
本实用新型涉及轴承领域,具体公开了一种工业机器人用圆锥滚子轴承。该工业机器人用圆锥滚子轴承包括内圈、外圈、滚动体和保持架,所述的内圈设有外沟道,所述的外圈设有内沟道;所述的内沟道和外沟道分别沿轴向平分为大端分段和小端分段,其中的大端分段与滚动体的大端对应,小端分段与滚动体的小端对应;所述的内沟道和/或外沟道的底面设有凸度,且凸度最高点位于大端分段。以上所述的工业机器人用圆锥滚子轴承具有很好的承载能力。锥滚子轴承具有很好的承载能力。锥滚子轴承具有很好的承载能力。
技术研发人员:朱金萍 戴之钧 牛建平 陈斌 平静艳 梁汝超
受保护的技术使用者:八环轴承(长兴)有限公司
技术研发日:2022.01.21
技术公布日:2022/6/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。