1.本实用新型涉及一种液晶面板搬运用手臂,尤其涉及一种液晶面板搬运用间距可调节型手臂。
背景技术:
2.在液晶面板传输领域,往往采用固定在工业机器人法兰盘前端的“叉形”手臂来抓取、放置目标面板,该手臂一般采用单层手臂包含2~4根固定齿的结构,上下共有两层,所有的手臂齿都是通过防松螺栓固定在手臂根部的插座里。
3.由于液晶面板产业的特殊性,各个厂家基本上都是采用相同尺寸标准进行生产,也就出现了液晶面板尺寸一般都是固定不变的的情况。根据液晶面板的实际尺寸,便可以设计对应的手臂,但是一旦叉齿数量和各叉齿间距固定下来,整个手臂的整体结构便会被确定下来。基于这个原因,上述手臂所能够搭载的液晶面板尺寸也就固定不变了。如果需要抓取不同尺寸的液晶面板,目前的主流操作方法主要有两种:一种是人为更换合适尺寸的手臂;另外一种是增加工艺和设备。
4.由于液晶面板搬运用手臂尺寸都比较大,所以手臂的更换作业耗时费力;而增加工艺和设备,虽然可以避免更换手臂的作业,但是高昂的设备成本投入往往让生产企业望而却步。
技术实现要素:
5.本实用新型所要解决的技术问题是,提供一种能够自动调节两根手臂齿之间间距的液晶面板搬运用间距可调节型手臂。
6.为了解决上述技术问题,本实用新型是通过以下技术方案实现的:一种液晶面板搬运用间距可调节型手臂,具有能够固定在机器人法兰盘上的底座以及设置在底座上的手臂齿,所述手臂齿具有两根,左右并列设置,所述底座上设置有开口向上的内腔,正面设置有与所述内腔内外连通的衔接孔,所述衔接孔为矩形长条孔,所述手臂齿的后端穿过衔接孔与设置在内腔内的手臂齿调节机构活动连接,所述手臂齿调节机构可以驱动两根所述手臂齿相向或反向同步运动,实现两根手臂齿之间的间距调整。
7.进一步地,所述手臂齿调节机构包括两组左右对称设置的无杆气缸,两组无杆气缸固定设置在内腔的底部,每组无杆气缸上设置有一块能够左右直线移动的手臂夹具,所述手臂夹具与所述衔接孔前后对应,两块手臂夹具分别与两根手臂齿固定连接。
8.进一步地,所述手臂夹具与所述内腔底部之间设置有直线导轨,所述直线导轨由滑轨和与滑轨滑动配合的滑块组成;所述滑轨平行于左右对称的两组无杆气缸,所述滑块具有两块,其分别与两块手臂夹具固定连接。
9.进一步地,所述直线导轨具有两组,前后并列设置。
10.进一步地,所述内腔底部位于两块手臂夹具左右两侧的部位对称设置有两块限位挡块。
11.进一步地,所述底座顶部设置有用于封闭内腔的盖板。
12.进一步地,所述手臂齿顶部设置有真空吸盘,所述真空吸盘具有多个,其前后等间距均列设置,所述真空吸盘通过线路和管路分别与设置在底座上内腔内的真空面板和真空发生器连接。
13.进一步地,所述真空面板固定在内腔后端部位,所述底座后端设置有与所述真空面板对应的观察窗。
14.进一步地,所述手臂齿顶部靠近前端的部位设置有载荷传感器。
15.进一步地,所述手臂齿内部设置有与后端相互连通的中空通道。
16.与现有技术相比,本实用新型的有益之处是:这种液晶面板搬运用间距可调节型手臂在产线上更换不同尺寸的液晶面板时,可以在不更换手臂夹具的情况下,直接通过无杆气缸来调整两根手臂齿之间的间距,从而保证手臂齿能够适应新的液晶面板大小,大大减少了更换手臂夹具的硬件成本,同时也极大的减轻了调试人员的工作量,提高了工作效率。
附图说明
17.下面结合附图对本实用新型进一步说明。
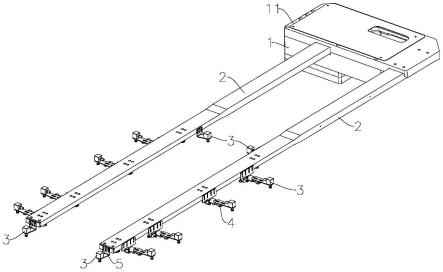
18.图1是本实用新型液晶面板搬运用间距可调节型手臂外部结构示意图;
19.图2是本实用新型液晶面板搬运用间距可调节型手臂内部结构示意图;
20.图3是本实用新型液晶面板搬运用间距可调节型手臂中手臂齿调节机构结构示意图;
21.图4是本实用新型液晶面板搬运用间距可调节型手臂中手臂齿俯视结构示意图;
22.图5是图4中a-a的结构剖视图。
23.图中:1、底座;11、内腔;12、衔接孔;2、手臂齿;21、真空吸盘;22、载荷传感器;23、中空通道;3、盖板;4、真空面板;5、无杆气缸;6、手臂夹具;7、限位挡块;8、直线导轨;81、滑轨;82、滑块。
具体实施方式
24.下面结合附图及具体实施方式对本实用新型进行详细描述:
25.图1和图2所示一种液晶面板搬运用间距可调节型手臂,具有能够固定在机器人法兰盘上的底座1以及设置在底座1上的手臂齿2,所述手臂齿2具有两根,左右并列设置,所述底座1上设置有开口向上的内腔11,正面设置有与所述内腔11内外连通的衔接孔12,所述衔接孔12为矩形长条孔,所述手臂齿2的后端穿过衔接孔12与设置在内腔11内的手臂齿调节机构活动连接,所述手臂齿调节机构可以驱动两根所述手臂齿2相向或反向同步运动,实现两根手臂齿2之间的间距调整。
26.如图3所示,为了实现两根手臂齿2相互间的间距调节,所述手臂齿调节机构包括两组左右对称设置的无杆气缸5,两组无杆气缸5固定设置在内腔11的底部,每组无杆气缸5上设置有一块能够左右直线移动的手臂夹具6,所述手臂夹具6与所述衔接孔12前后对应,两块手臂夹具6分别与两根手臂齿2固定连接,所述手臂齿2与所述手臂夹具6之间通过防松螺栓固定连接。
27.为了保证手臂夹具6运行的稳定性,所述手臂夹具6与所述内腔11底部之间设置有直线导轨8,所述直线导轨8由滑轨81和与滑轨81滑动配合的滑块82组成;所述滑轨81平行于左右对称的两组无杆气缸5,所述滑块82具有两块,其分别与两块手臂夹具6固定连接。
28.为了保证手臂夹具6运行稳定性的同时保证手臂夹具6的支撑强度,所述直线导轨8具有两组,前后并列设置。
29.为了提高手臂夹具6运行位置的安全性,所述内腔11底部位于两块手臂夹具6左右两侧的部位对称设置有两块限位挡块7。
30.为了保证外观美观性同时防止内腔11内进入粉尘,所述底座1顶部设置有用于封闭内腔11的盖板3。
31.如图4所示,为了便于固定手臂齿2上承载的液晶面板,所述手臂齿2顶部设置有真空吸盘21,所述真空吸盘21具有多个,其前后等间距均列设置,所述真空吸盘21通过线路和管路分别与设置在底座1上内腔11内的真空面板4和真空发生器连接。
32.为了能够监视真空吸盘21作用时所能够达到的真空压力,所述真空面板4固定在内腔11后端部位,所述底座1后端设置有与所述真空面板4对应的观察窗。
33.为了能够判断液晶面板的位置,所述手臂齿2顶部靠近前端的部位设置有载荷传感器22,所述载荷传感器22是通过光学传感器来判断液晶面板位置的装置。
34.如图5所示,为了方便真空吸盘21线路及管路以及载荷传感器22线路的穿引,所述手臂齿2内部设置有与后端相互连通的中空通道23,保证了手臂齿2外观整洁美观以及各管路和线路的安全性。
35.其具体工作原理如下:两组左右对称的无杆气缸5可以驱动对应的手臂夹具6进行左右方向的直线移动,手臂夹具6左右移动时通过直线导轨8可以限定其运行轨迹,同时可以对手臂夹具6产生一定的支撑力,保证与手臂夹具6固定连接的手臂齿2性能,两块手臂夹具6在两组无杆气缸5的驱动下,通过相向运动或反向运动可以实现相互间左右间距的调整,进而带动控制两根手臂齿2相互间的间距调整,方便手臂齿2适用于不同大小的液晶面板使用。
36.这种液晶面板搬运用间距可调节型手臂在产线上更换不同尺寸的液晶面板时,可以在不更换手臂夹具的情况下,直接通过无杆气缸来调整两根手臂齿之间的间距,从而保证手臂齿能够适应新的液晶面板大小,大大减少了更换手臂夹具的硬件成本,同时也极大的减轻了调试人员的工作量,提高了工作效率。
37.需要强调的是:以上仅是本实用新型的较佳实施例而已,并非对本实用新型作任何形式上的限制,凡是依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本实用新型技术方案的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。