针对样本和/或样本容器表征提供背景照明校准的方法和设备
1.相关申请的交叉引用本技术要求2019年10月31日提交的题为“methods and apparatus providing calibration of background illumination for sample and/or sample container characterization”的美国临时专利申请no.62/929,058的权益,该临时专利申请的公开内容通过引用出于所有目的整体地并入于此。
技术领域
2.本公开涉及被适配成对样本管(试样容器)进行成像的成像方法和成像设备,并且更特别地,涉及用于校准成像设备的方法和设备。
背景技术:
3.自动化测试系统可以使用一种或多种试剂和/或其他材料进行临床化学或化验,以标识生物样本中的分析物或其他成分,诸如血清、血浆、尿液、间质液、脑脊髓液等。出于方便和安全性原因,这些样本几乎始终被包含在样本管(例如,血液收集管)中。每个样本管可以用盖来盖住,并且在一些情况下,这些盖可以包括盖颜色和/或盖类型,该盖颜色和/或盖类型可以提供关于如下各项的信息:要在其上进行的测试的类型、该管中包含的添加剂的类型(例如,血清分离剂、诸如凝血酶之类的凝血剂(coagulant)、或抗凝血剂(anticoagulant)以及其特定类型,如edta、k2edta或柠檬酸钠、和/或抗糖解添加剂(anti-glycosis additive))、该管是否被提供有真空能力等。
4.自动化测试方面的改进伴随着自动化预分析样本处理中的相应进步,该自动化预分析样本处理诸如:批量制备、用于分离样本成分的样本离心、便于样本存取的盖移除(去盖)、等分试样(aliquot)制备、针对溶血(h)、黄疸(i)和/或高脂血(l)(下文中被称为“hil”)或正常性(n)的预筛选、以及针对如凝块、泡沫或气泡的其他伪影(artifact)的预筛选。这种自动化预分析样本处理可以是实验室自动化系统(las)的一部分。在一些情况下,las自动地运送样本管中包含的样本以用于预分析样本处理、以及运送到包含临床化学分析器和/或化验仪器(本文中单独地以及共同地被称为“分析器”或“多个分析器”)的分析站以用于测试。该测试涉及生成改变的反应,该改变可以被读取和/或以其他方式操控,以确定样本中包含的分析物或其他成分的浓度。
5.las可以一次处理被加标签的样本管(例如,包括条形码标签)中包含的任何数量的不同样本,并且样本管可以具有所有不同的大小和管组装件类型,包括不同的盖样式(形状)和颜色,它们也可以被混合(intermingle)。las可以自动地运送样本管以用于预分析处理操作,所有预分析处理操作都在样本实际经受由一个或多个分析器进行的临床分析或化验之前进行。
6.在自动化预分析样本处理的一些实施例中,品质检查模块可以接收其中包含样本的样本管,并且针对干扰物(诸如,hil)的存在来对样本进行预筛选。针对hil的预筛选涉及
捕获样本管和样本的一个或多个数字图像,并且然后处理该图像数据以确定h、i和/或l是否存在,并且可能地,如果存在,则确定h、i和/或l的指数(相对量),或者可以确定样本是正常的(n)。样本中的干扰物的存在可能会不利地影响稍后从分析器获得的分析物或成分测量的测试结果。
7.在某些设备中,诸如利用计算机辅助的基于模型的系统(诸如,通过使用人工智能(例如,卷积神经网络——cnn))来对样本容器和样本进行数字成像和处理,使得可以确定干扰物(hil或n)的存在或不存在。盖的类型和颜色也可以被辨别。在成像期间,可以从多个视点来捕获样本管(包括盖)和样本的图像。
8.然而,在某些条件下,这种设备可能会产生性能变化,并且甚至产生从一个系统到下一个系统的性能变化。因此,寻求对这种样本和/或样本容器进行成像的改进方法和设备。
技术实现要素:
9.根据第一方面,提供了一种校准方法。该校准方法包括:关于每个成像装置来标识每个光板上的成像区;确定针对每个成像装置的每个光板的成像区的中心位置;使用针对每个成像装置的每个光板的中心位置来确定成像设备的最佳光学中心;将管校准工具安装在驻留于轨道上的载体中;在轨道上移动该载体,使得该管校准工具的中心位于最接近该成像设备的最佳光学中心的位置处;以及使用该管校准工具的中心来确定用于背光校准的感兴趣区域(roi)的中心。
10.另一方面,提供了一种光板校准方法。该光板校准方法包括:开启去往在最接近感兴趣区域的第一侧上的光板的多个光元件的第一驱动电流;调整去往第一侧上的光源的多个光元件的第一驱动电流,直到该感兴趣区域处的代表性强度达到预设值;以及在该驱动电流仍被驱动到第一侧上的光源的多个光元件的情况下,调整去往第二侧上的光源的多个光元件的驱动电流,直到该roi的代表性强度达到第二预设强度值。
11.本公开的仍其他方面、特征和优点可以容易地从说明了多个示例实施例的以下描述中变得明显。本发明还可以能够具有其他的和不同的实施例,并且其若干个细节可以在各个方面被修改,所有这些都不脱离本公开的范围。此外,虽然已经列举了特定优点,但是各种实施例可以包括全部、一些所列举的优点、或者不包括所列举的优点。本公开将覆盖落入权利要求的范围内的所有修改、等同物和替代物。
附图说明
12.下面描述的附图用于说明性目的,并且不一定按比例绘制。附图不意图以任何方式限制本发明的范围。因此,附图本质上被认为是说明性的,而不是限制性的。
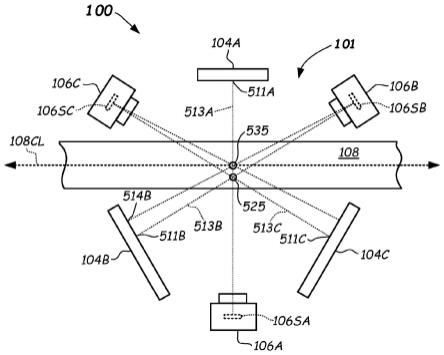
13.图1图示了包括成像设备的品质检查设备的俯视透视示意图,根据一个或多个实施例的校准方法与该品质检查设备被一起使用。
14.图2图示了其中包含被分离的(例如,离心的)样本的样本管的侧视平面图。
15.图3图示了其中包含被分离的(例如,离心的)样本并且进一步包括凝胶分离剂的样本容器的侧视平面图。
16.图4a图示了根据一个或多个实施例的品质检查设备的俯视图,其中出于说明目的
移除了顶部,并且该品质检查设备包括成像设备和样本管,该样本管包括要在成像位置处表征的样本。
17.图4b图示了根据一个或多个实施例的品质检查设备的成像设备的前视透视图,其中出于说明目的移除了壳体,该品质检查设备包括板化光源以及在成像位置处安装在载体中的样本管。
18.图4c图示了根据一个或多个实施例的安装在载体的另一个实施例中的管校准工具的透视图。
19.图4d图示了根据一个或多个实施例的包括阶梯式构造的图4c的管校准工具的侧视图。
20.图5a图示了根据一个或多个实施例的品质检查设备的成像设备的俯视示意图,其中出于说明目的移除了壳体,该示意图图示了机械中心和最佳光学中心。
21.图5b图示了根据一个或多个实施例的由成像装置106b取得的像素化图像,其包括光学区域,该光学区域定位在光板104b上并且位于该图像的横向几何中心处并且垂直跨越该板的高度。
22.图5c图示了根据一个或多个实施例的由成像装置106a取得的像素化图像,其包括光学区域,该光学区域定位在光源104a上并且位于该图像的横向几何中心处并且垂直跨越板的高度。
23.图5d图示了根据一个或多个实施例的由成像装置106c取得的像素化图像,其包括光学区域,该光学区域定位在光板104c上并且位于该图像的横向几何中心处并且垂直跨越该板的高度。
24.图5e图示了根据一个或多个实施例的由成像装置106b取得的像素化图像,其包括由光板104b上的lcd遮罩形成的遮蔽区域,并且图示了该图像的第二光学区域(非遮蔽区域)。
25.图5f图示了根据一个或多个实施例的由成像装置106c取得的像素化图像,其包括由光板104c上的lcd遮罩形成的遮蔽区域,从而图示了该图像的第二光学区域(非遮蔽区域)。
26.图5g图示了根据一个或多个实施例的由成像装置106a取得的像素化图像,其包括由光源104a(光板)上的lcd遮罩形成的遮蔽区域,并且图示了该图像的图示了第二光学区域的第二光学区域(非遮蔽区域)。
27.图5h图示了根据一个或多个实施例的由成像装置106b取得的像素化图像,其包括被容纳在载体中的校准工具,其中该校准工具尽可能接近最佳光学中心而定位。
28.图5i图示了根据一个或多个实施例的由成像装置106c取得的像素化图像,其包括被容纳在载体中的校准工具,其中该校准工具尽可能接近最佳光学中心而定位。
29.图5j图示了根据一个或多个实施例的由成像装置106a取得的像素化图像,其包括被容纳在载体中的校准工具,其中该校准工具尽可能接近最佳光学中心而定位。
30.图6图示了根据一个或多个实施例的被适配成校准成像设备的校准方法的流程图。
31.图7a图示了根据一个或多个实施例的被适配成校准光板的校准方法的流程图。
32.图7b图示了根据一个或多个实施例的在其相应横向侧上包括多个光元件的光板
的示意性前视图。
33.图7b'图示了根据一个或多个实施例的包括lcd遮罩的光板的示意性前视图。
34.图7c图示了根据一个或多个实施例的在光板104b的第一侧上的多个光元件的照明之后由成像装置106b取得的光板104b的前视像素化图像。
35.图7d图示了根据一个或多个实施例的在光板104b的第一侧和第二侧上的多个光元件的照明之后由成像装置106b取得的光板104b的前视像素化图像。
36.图8图示了根据一个或多个实施例的多个偏离中心(off-center)的感兴趣区域(roi)(单点线框和点划线框)和中心roi(实心框)的位置的像素化图像,其中每个roi内的数字是其平均强度与中心roi的平均强度相比的比率,该比率被表示为百分比。
具体实施方式
37.背景照明校准用于完成样本管品质检查,尤其是用于基于样本容器中包含的样本的液体(例如,血清或血浆部分)的颜色来检查如溶血、黄疸、高脂血(hil)这样的干扰物的存在。在本公开中,提供了方法和设备来执行样本管品质检查设备内的成像设备的背景照明校准,以确保跨多个光谱和多个机器(例如,样本管品质检查设备)的基本一致的照明。可以实现一致的背景照明,这是因为针对每个设置来标识机械中心,以便得到每个光板的感兴趣区域(roi)的中心。这样,该方法可以用于调整电流,以达到该roi内的预定义强度值,以便跨多个光谱和多个机器提供基本一致的背景照明。实施例提供了用于找到机械中心以便推断出每个光照板的roi的方法。在其他实施例中,提供了用于调整去往侧向光照光板(side-lighted light panel)的驱动电流的方法。
38.利用跨多个品质检查设备(机器)的一致光照,可以使样本管品质检查功能(诸如,基于流体颜色分布的hil干扰筛选)更加精确。这对于节省hil测试的时间和资源非常有用,诸如关于在分析器上的测试非常有用。
39.特别地,本公开涉及用于校准样本管品质检查设备中的背景照明的方法,该样本管品质检查设备可以涉及利用各种光谱进行光照。此外,样本管品质检查设备可以涉及利用光源来对样本管和其中的样本进行光照,该光源包括背光板,这些背光板包括从相应背光板的两侧(例如,横向侧)被照亮的光元件(例如,led)。可能的替代解决方案可以利用光度计来手动地测量亮度,和/或利用分光计来手动地测量样本管照明区(下文中为成像位置)处的颜色分布。在板校准期间,可以调整背景照明源的驱动电流/电压。可选地,可以调整传感器的曝光。
40.根据实施例,本公开涉及一种方法和设备,该方法和设备被设置和使用以执行诸如样本管表征设备(例如,品质检查设备)内的背景照明的校准,从而确保一致且准确的背景照明。改进背景照明校准可以改进关于例如样本中的hiln检测和/或伪影检测(泡沫、(一个或多个)气泡或(一个或多个)凝块的检测)的辨别能力。
41.在一些实施例中,本公开涉及一种方法和设备,该方法和设备被设置和使用以跨多个样本管表征设备(例如,跨多个品质检查设备或类似机器)来执行背景照明校准。如本文中所使用的背景照明意指通过一个或多个照明源对样本管的背部/侧面进行照明,该一个或多个照明源被定位在样本管后方的一个或多个位置处,并且其中成像装置位于样本管的前方。例如,在一些实施例中,背景照明可以包括来自一个或多个照明装置(例如,一个或
多个光板)的背景光照,这些照明装置可以位于样本管的后面,即,样本管位于光源与对应的成像装置之间。
42.此外,本公开的实施例提供了一种方法和设备,该方法和设备被配置成校准成像设备的背部照明设备,使得该成像设备可以捕获样本管和其中的样本的一个或多个图像,其中一个或多个所捕获的图像可以用于表征样本的一个或多个特征,诸如例如hiln和/或伪影的存在。在品质检查设备中,利用对试样品质的检查来确保对样本执行的一个或多个测试的适当性。例如,如果样本包含h、i和/或l,则可以标记错误,并且重新抽取(redraw)样本和/或对样本进行进一步处理以改善干扰物。因此,改进的背景照明可以改进对样本的表征。因此,如果标识了样本中的异常,则可以在将样本发送到分析器之前转移(divert)样本,从而节省分析器资源并且可能地避免可能产生错误结果的测试。
43.特别地,本公开的实施例涉及一种校准设备和校准方法,该校准设备和校准方法被配置成从已经被适当校准的一个或多个成像装置来提供改进的图像数据。在进一步的实施例中,提供了能够快速校准一个或多个类似成像设备(例如,实质克隆(substantial clone))的方法和设备。
44.现在参考图2和图3,在一些实施例中,如本文中描述的样本212(试样)被收集在样本管102(诸如,血液收集管)中,并且可以包括分离之后(例如,在使用离心进行分级分离(fractionation)之后)的沉降血液部分212sb以及血清和血浆部分212sp,如所示出的那样。沉降血液部分(有时被称为“浓缩细胞部分”)由血细胞(诸如,白血细胞(白细胞)、红血细胞(红细胞)和血小板(凝血细胞))组成,它们聚集并且从血清或血浆部分212sp分离。沉降血液部分212sb通常在样本管102的底部部分处被找到。血清或血浆部分212sp是血液中的不是沉降血液部分212sb的一部分的液体组份。它通常在沉降血液部分212sb上方被找到。血浆和血清的主要区别在于凝血组份(主要是纤维蛋白原)的含量。血浆是未凝结的液体,而血清指代在内源性酶或外源性组份或凝血剂的影响下已经被允许凝结的血浆。
45.在一些样本管102中,可以使用小的凝胶分离剂313(诸如,图3中所示的填塞物(plug)),该凝胶分离剂313在分级分离期间将其自身定位在沉降血液部分212sb与血清或血浆部分212sp之间。它用作屏障物以防止这两个部分之间的混合,并且可以在采用常规方式的分级分离之前被提供在样本管102中。
46.图1中示出的是样本管品质检查设备100的实施例,根据本公开的背景校准方法可以与该样本管品质检查设备100一起使用。图1示出了品质检查设备100内的光学成像设备101的示例,该品质检查设备100包括多个光源104a-104c(例如,光板)和多个成像装置106a-106c。在一些操作中,光源104a-104c主要用于从样本管102的背侧对样本管102进行背部照明,所以样本管102前方的相应成像装置(例如,光电检测器、电荷耦合器件(ccd)、数码相机、互补金属氧化物半导体(cmos)传感器等)中的每一个可以检查样本管102中的样本212的流体性质。流体性质可以是例如hiln、样本212的一个或多个组分的体积或尺寸、和/或其中的伪影(例如,凝块、泡沫、气泡)的存在。背景照明是该校准方法的主题,而不是前景照明(前部照明)。
47.针对流体品质检查(如hil干扰物预筛选),包括背光板的光源可以利用发射各种光谱的发光二极管(led),这是由于不同的干扰物类型跨不同的光谱可能表现得不同。由于每个品质检查设备100(例如,机器)可能具有略微不同的设置的成像装置(例如,相机、传感
器等)、背光板和样本管轨道,所以背景照明校准应当考虑这些变化中的一些或全部,以确保品质检查设备100内以及跨多个其他品质检查设备(其他机器)的一致观察。
48.为此,根据背景校准方法的第一方面,所提议的是,以多个阶段来进行背景照明:(1)光学中心定位、(2)机械中心定位,以及(3)led调整。
49.此后,可以进行led健康检查。led健康检查可以涉及审查光板上的一个或多个其他区域(可以是多个其他区域)的局部强度,并且将这些局部强度值与感兴趣区域(roi)的预先确立的强度值进行比较。对其他区域的这种健康检查可以确定一个或多个区域何时可能出现故障。针对单个品质检查设备100、并且特别地跨多个成像品质检查设备(如品质检查设备100)实现一致的背景光照可以确保适当且一致的性能和样本表征。进一步执行健康检查可以可能地标识背光板和/或成像装置的有缺陷区域。
50.如图1中所示,光源104a-104c和成像装置106a-106c可以被布置成从一个或多个不同的横向视点(例如,如所示出的三个视点1、2和3)提供样本容器102和包含在其中的样本212的横向2d图像。可以使用更多或更少的视点。在用于样本表征的图像捕获期间,可以对样本容器102和样本212进行背光照明,即,在样本容器102和样本212后方进行照明。例如,可以通过光源104a(例如,光板)针对成像装置106a提供背景光照,通过光源104b(例如,光板)针对成像装置106b提供背景光照,以及通过光源104c(例如,光板)针对成像装置106c提供背景光照。利用光源104a-104c(例如,光板)的背部光照可以与对成像装置106a-106c所取得的图像的高动态范围(hdr)图像处理及其处理耦合。可以使用任何合适的表征方法来量化和表征样本212,其中该表征包括量化在图像窗口内的各个空间位置处通过样本212的光透射的强度。成像窗口应当足够大以捕获期望被表征的部分的图像,该部分诸如血清或血浆部分212sp、沉降血液部分1212sb、或凝胶分离剂313(参见图2-3)。
51.在一些实施例中,该表征方法和设备可以用于使用图像处理(例如,hdr图像处理)连同背景照明以高精度来确定血清或血浆部分212sp和/或沉降血液部分212sb和/或凝胶分离剂313的界面边界的位置、以及这些组份的体积和/或深度。简而言之,针对一个或多个视点(例如,视点1-3)的照明2d图像数据集可以用于表征样本212。特别地,在利用光源104a-104c的背景光照下获得的2d图像数据集还可以用于确定关于样本212的信息,诸如样本中是否存在干扰物(诸如,溶血(h)、黄疸(i)和/或高脂血(l)(下文中为“hil”))、或者样本是否正常(n)、或者甚至其中的伪影(例如,凝块、泡沫或气泡)的存在。
52.再次参考图1,在一个或多个实施例中,品质检查模块100可以被提供作为las的一部分。las可以包括轨道108(仅示出了一部分),该轨道108起作用以将包括样本212的样本容器102运送到一个或多个分析器(未示出)、以及运送到被提供在轨道108上或沿着轨道108的任何合适位置处的品质检查模块100。例如,品质检查模块100可以位于装载站处,邻近分析器或作为分析器的一部分,或者位于沿着轨道108的其他地方,使得样本212和样本容器102可以被预筛选和表征。在某些实施例中,该表征可以在样本容器102驻留于可沿着轨道108移动的载体122上时进行。然而,为了清楚,包括背景光照的品质检查模块100可以不被包括在轨道108上,并且包括样本212的样本容器102可以例如或者手动地或者利用机器人的动作从品质检查模块100被装载和卸载。例如,机器人可以从装载站卸载样本容器,
对其进行离心,将其放置到装载站或轨道108旁边的品质检查模块的保持器中,并且然后在进行成像以完成预筛选之后,将样本容器102放置到轨道108上的载体中。
53.在一些实施例中,该表征可以包括数据处理(例如,hdr图像处理的数据处理),包括在多个曝光(例如,曝光时间)下以及利用背景照明来捕获多个图像。图像处理可以涉及使用具有不同标称波长的多个不同光谱。该多个图像可以针对多个视点1-3使用成像装置106a-106c来获得,并且可能地针对多个视点1-3中的每一个使用多个不同光谱利用背部照明来获得。
54.可以针对每个视点1-3使用板化照明(例如,使用光板)来产生图像。用于背景照明的光谱光源可以包括红色(r)光源、绿色(g)光源和蓝色(b)光源。可选地,可以使用白光(w)、近红外(nir)或甚至红外(ir)光源。品质检查模块100可以获得针对每个光谱在多个曝光时间下的图像。例如,在每个光谱(或波长范围)下,可以获得不同曝光时间下的4-8个图像。然后,计算机143可以进一步处理这些多个图像,以生成样本表征结果。可以使用任何合适的分割和/或表征方法。
55.作为图像处理的一部分,执行校准以合适地调整图像强度,以确保背景光照对于用于每个图像捕获装置106a-106c的照明的光的每个光谱(例如,r、g、b等)而言具有适当的强度。本文中将参考图1-8来进一步描述(一个或多个)品质检查模块100的成像设备101的校准方法的进一步细节。
56.典型地,待自动处理的样本212(图2和3)可以被提供在样本容器102中,样本容器102可以用盖214盖住。盖214可以具有不同的形状和/或颜色(例如,红色、宝蓝色、浅蓝色、深绿色、浅绿色、黑色、灰色、棕褐色、橙色或黄色、或颜色组合),这些形状和/或颜色可以在如下方面具有意义:样本容器102用于什么测试、其中包含的添加剂的类型、试样是否应当处于真空下等。也可以使用其他颜色。根据一个方面,可能期望的是,对盖214进行成像以表征关于盖214的信息,使得它可以用于与测试订单(test order)的交叉检查(cross check),并且验证正确的样本管102被用于所订购的测试。例如,在一些实施例中,背景光照可以用于对盖214的不透明性(opacity)进行成像。
57.每一个样本容器102可以被提供有标识信息218i(即,标记),诸如可以机器可读的条形码、字母、数字、字母数字或其组合。例如,标识信息218i可以经由实验室信息系统(lis)147来指示患者的标识以及要对样本212执行的测试、或来自实验室信息系统(lis)的其他信息,或者以其他方式与它们相关联。这种标识信息218i通常可以被提供在标签218上,该标签218粘附到样本容器102、或者以其他方式被提供在样本容器102的侧面上。标签218通常不会一直围绕样本容器102延伸,或者不会一直沿着样本容器102的高度延伸。在一些实施例中,多个标签218可以被粘附,并且可以彼此略微重叠。因此,尽管标签218可能会遮挡样本212的一些部分的视图,但是仍然可以从视点1-3中的一个或多个观看到样本212的其他部分。该表征方法和品质检查模块100的一个或多个实施例可以使得能够通过从多个视点(例如,例如视点1、2和3)对样本212进行成像来表征样本212,而无需对样本容器102进行不期望的旋转。可以使用其他数量的多个视点。
58.如在图2和3中最佳地示出的,样本212可以包括被包含在管215内的血清或血浆部分212sp和沉降血液部分212sb。空气216可以被提供在血清和血浆部分212sp上方,并且空气216与血清或血浆部分212sp之间的分界线被定义为液体-空气界面(la)。血清或血浆部
分212sp与沉降血液部分212sb之间的分界线在本文中被定义为血清-血液界面(sb),并且在图2中示出。空气216与盖214之间的界面在本文中被称为管-盖界面(tc)。血清或血浆部分212sp的高度是(hsp),并且被定义为从血清或血浆部分212sp的顶部到沉降血液部分212sb的顶部的高度。沉降血液部分212sb的高度是(hsb),并且被定义为图2中从沉降血液部分212sb的底部到sb处的沉降血液部分212sb的顶部的高度。图2中的htot是样本212的总高度,并且htot = hsp hsb。
59.在其中使用凝胶分离剂313的情况下(参见图3),血清或血浆部分212sp的高度是(hsp),并且被定义为从la处的血清或血浆部分212sp的顶部到sg处的凝胶分离剂313的顶部的高度。沉降血液部分212sb的高度是(hsb),并且被定义为图3中从沉降血液部分212sb的底部到bg处的凝胶分离剂313的底部的高度。图3中的htot是样本212的总高度,并且被定义为htot = hsp hsb 凝胶分离剂313的高度。
60.在每种情况下,壁厚度是tw,外宽度是w,并且样本容器102的内宽度是wi。管的高度(ht)在本文中被定义为从管215的最底部部分到盖214的底部的高度。使用前景照明和/或背景照明的表征方法可以用于确定这些几何属性中的任何一个。
61.如上所讨论,载体122可以沿着轨道108来移动样本容器102,并且在品质检查设备100中的成像位置109处停止,如图1和4a-4b中所示。载体122可以是被动的、非机动(non-motored)的圆盘,该圆盘可以被配置成在轨道108上承载单个样本容器102,其中轨道108是可移动的,或者载体122可以是自动化的,包括板载驱动马达,该马达可以被编程为在轨道108周围移动并且在预编程的位置处停止,诸如在成像位置109处停止。在任一种情况下,载体122可以包括保持器,该保持器被配置成将样本容器102保持在竖直取向中,使得它可以容易地诸如从一个视点(图4b)或从多个视点1-3(图1和4a)被成像。保持器可以包括多个指状物或片簧(leaf spring)、其组合或其他合适的机构,它们可以将样本容器102支撑和固定在载体122中,但是其中的一些可以在横向上是可移动的或柔性的,以适应要容纳在其中的不同大小(直径)的样本容器102。
62.品质检查设备100可以由计算机143来控制,计算机143可以是基于微处理器的中央处理单元(cpu),该中央处理单元具有合适的存储器和合适的调节电子器件、驱动器和软件,以用于操作各种自动化设备组件。计算机143可以控制品质检查设备100的操作以及本文中描述的表征、处理、照明和成像。
63.对样本212进行预筛选还允许准确量化血清或血浆部分212sp和/或沉降血液部分212sb的相对量、和/或它们之间的比率。此外,预筛选可以确定tc、la、sb、sg和/或bg和/或样本容器102的最底部部分的物理垂直位置。量化确保了:如果没有足够量的血清或血浆部分212sp可用于在其上执行已经订购的测试,则可以使样本212停止以免前进到一个或多个分析器。以这种方式,可以经由避免对空气的可能吸入来避免不准确的测试结果。用于准确地量化la和sb或sg的物理位置的能力不仅可以最小化吸入空气的可能性,而且还可以最小化吸入沉降血液部分212sb或凝胶分离剂313(如果存在的话)的可能性。因此,可以避免或最小化用于为分析器或在等分取样站处吸入血清或血浆部分212sp的样本吸入移液管(aspiration pipette)的堵塞和污染。
64.参考图1和4a,示出并描述了品质检查设备100的第一实施例,该品质检查设备100包括体现为光板组装件的光源104a-104c,该光源可以包括光谱可切换的光源。由品质检查
设备100获得的图像可以允许精确的吸入移液管定位、关于足够量(例如,体积或高度hsp)的血清或血浆部分212sp可用于已经定购的测试的确定、和/或例如h、i和/或l或n(下文中为hiln)的标识。因此,使用品质检查模块100可以帮助避免移液管堵塞、由移液管进行的空气吸入,和/或标识不可接受的hil水平,使得有价值的分析器资源不被浪费,并且可以改进测试结果中的置信度。
65.现在参考图4a,示出了品质检查设备100的实施例。品质检查设备100可以包括成像装置106a-106c,成像装置106a-106c被配置成从多个横向视点(例如,视点1-3)捕获成像位置109处的数字图像(即,像素化图像)。成像装置106a-106c可以是任何合适类型的数字成像装置,诸如数码相机、电荷耦合器件(ccd)、光电检测器阵列、cmos传感器等。成像装置106a-106c可以能够取得具有任何合适图像大小的数字图像(包含像素的像素化图像),以便捕获至少血清或血浆部分212sp的图像,并且在一些实施例中,捕获沉降血液部分212sb和盖214的图像。也可以使用其他图像大小。
66.成像装置106a-106c可以被提供在成像位置109附近并且被训练或聚焦以捕获成像位置109处的视图窗口,该视图窗口包括样本容器102的预期位置。在一些实施例中,样本容器102可以被放置在或停止在成像位置109处,诸如通过在轨道108上停止、或者通过机器人(未示出)被放置在成像位置109处,使得其近似位于该视图窗口的中心。
67.再次参考图1和4a,品质检查设备100可以包括光谱可切换的光源104a-104d,如所示出,该光源由光板组装件提供,以使得能够提供光谱可切换的光照(背部光照,如所期望的)。光谱可切换的光源104a-104c可以在至少两个光谱之间是光谱可切换的,并且在一些实施例中,在3个或更多个离散光谱之间是光谱可切换的。光源104a-104c可以如例如美国专利公布2018/0372648中描述的那样来构造。
68.光源104a-104d可以提供可切换的多光谱照明。例如,在图4a中所示的一个实施例中,光源104a可以是具有光照元件445的阵列的光板。图4a中的其他板可以以与图4b中相同的方式来构造。每个光板(例如,光源104a-104c)可以包括多个可独立切换的光照元件445,或者光照元件445可以按组来切换,诸如具有不同发光光谱的led。如图4b和7b中所示,光照元件445(led)可以沿着板的相应侧来布置。光照元件445的切换可以通过可在计算机143上操作的软件来实现,该计算机143与适当的电源和电流驱动器(744——图7b)耦合。因此,通过一次仅选择光照元件中的一些用于照明,光源104a-104c可以在具有不同标称波长的多个不同光谱下照明。
69.例如,led可以包括不同颜色的led,诸如红色led(r)、绿色led(g)和蓝色led(b),它们发射不同标称波长下的光谱。例如,光板组装件可以发射634nm /-35nm下的红光、537nm /-35nm下的绿光、以及455nm /-35nm下的蓝光。特别地,光阵列可以包括r、g和b led的集群,这些led可以沿着光阵列的高度以重复的模式来重复地布置。每一个相同颜色的led可以同时照明。例如,每一个红色led可以被同时开启,以提供来自光板组装件的红色照明,从而在其成像期间对成像位置109处的样本容器102和样本212进行背部照明。同样地,每一个绿色led可以被同时开启,以在成像期间提供对成像位置109的绿色照明。类似地,每一个蓝色led可以被同时开启,以在成像期间提供成像位置109处的蓝色照明。
70.应当认识到的是,r、g和b仅仅是示例,并且可以使用其他波长的光元件445,诸如可以针对某些类型的背景和/或前景光成像来选择白光元件(例如,大约400nm至大约700nm
的波长范围)。在其他实施例中,uv(大约10nm至大约400nm的波长范围)、近红外(nir——大约700nm至大约1250nm的波长范围)、或者甚至红外(ir——大约1250nm至大约2500nm的波长范围)可以被包括,并且可以有时针对某些类型的成像而被打开。当使用多个板和视点时,在仅照亮针对该特定成像装置106a-106c的背部照明的情况下分离地取得每个相应颜色的图像。
71.校准方法现在参考图5a,示出了品质检查设备100的成像设备101中的各种成像装置106a-106c和光源104a-104c的示意图。还示出了承载样本管102的载体122(图1)在其上行进的轨道108的中心线108cl。
72.还参考图6,在第一阶段中,校准方法600操作以定位成像设备101的光源104a-104c中的光学中心位置,该光学中心位置然后可以用于定义样本品质检查设备100的成像设备101内的感兴趣区域(roi),该感兴趣区域可以接收用于样本管102和其中容纳的样本212的背部光照和表征的最佳光照。这可以通过首先定位成像设备101的最佳光学中心525来完成。该位置可以涉及将成像装置106a-106c的每个传感器106sa-106sc的传感器光学中心连接到相应光源104a-104c的每个对应的投影中心511a-511c。投影中心511a-511c是由从每个传感器光学中心到相应光源104a-104c的垂直投影而得到的位置。因此,投影中心511a-511c可以偏离于相应光源104a-104c的物理中心,并且尤其是对于光源104b、104c而言。如图5a中所示,最佳光学中心525位于与这三个线513a-513c的交点最接近的点处。机械中心535位于偏离于最佳光学中心525的位置处,并且是沿着轨道108的中心线108cl的位置。
73.为了定位最佳光学中心525,我们首先检测每个背光板104a-104c的中心线(物理垂直中心线)。在图5b-5d中示出了物理中心。在图5b-5d中示出了由直接面对的成像装置106a-106c观察到的三个光源104a-104c,其中每个图像中的矩形指示如下光学区域:该光学区域是用于对样本管102进行背部照明的预期成像区538a-538c。图5b-5d图示了图像537a-537c,该图像537a-537c来自相应成像装置106a-106c(由相应成像装置106a-106c取得),并且示出了其中的相应光源104a-104c(光板)的取向,其中成像区538a-538c被示出定位在图像537a-537c内。所标识的成像区538a-538c是任意宽度的窗口,但是其横向居中于每个图像537b和537c的中心位置(由十字线541a-541c所标识)上。可以看出的是,光板(光照区)没有居中于图像537a-537c上。十字线541a-541c被示出为具有位于每一个相应图像538a-538c的宽度的中心处的水平位置。十字线541a-541c的垂直位置被近似示出为相应光源104a-104c的垂直中心。因此,在框602中,关于每个成像装置106a-106c来标识成像区538a-538c。成像区538a-538c可以足够宽,以容纳例如样本管102的预期宽度,并且在区间上延伸得足够高以及足够低,以近似从顶部到底部来近似地覆盖光源104a-104c的照明板区。如果要对多个不同宽度的样本管102进行成像,则成像区538a-538c可以足够宽以容纳最宽的管。
74.接下来,在框604中,确定每个光源104a-104c的非遮蔽成像区539a-539c的中心位置544a-544c。例如,lcd遮罩层可以被叠加在每个光源104a-104c上。这可以通过在每个光源104a-104c前方使用lcd遮罩755来完成。lcd遮罩755的遮蔽部分在图7b'中用阴影线示出。给定如图1和4a中所示的一个实施例中的光板设置——其中光源104b和光源104c与光
源104a相比更远离成像位置109的机械中心535,光源104b和光源104c可以被制成比光源104a更大,以便提供可比较的光照。
75.通过遮蔽掉(诸如,利用lcd遮罩755)除了光源104a-104c前方的预期非遮蔽成像区539a-539c之外的所有光,可以通过定位搜索窗口540a-540c内的中心区段的边界来光学地定位每个光源104a-104c的中心位置544a-544c。搜索窗口540a-540c的水平大小由104a-104c的横向宽度来确定。搜索窗口540a-540c的垂直大小可以根据经验来预先确定,诸如通过或者使用固定大小(诸如,100个像素)或者使用538a-538c的高度的1/4。搜索窗口540a-540c基于从相应图像捕获装置106a-106c观看的其被照明的光照区而被垂直地定位在相应光源104b的垂直中心处。
76.如图5e-5g中所示,方法600首先根据如图5b-5d中所看到的光源104a-104c的大小(宽度)来定义搜索窗口540a-540c(边界框)。在搜索窗口540a-540c内,成像区539a-539c的边界可以被容易地定位,如在搜索窗口540a-540c内垂直延伸的垂直线中所示,并且位于每个光源104a-104c的搜索窗口540a-540c中的成像区内的确切中心位置——其被描绘为十字线(x)544a-544c——可以被相应地导出。假设成像设备101中的成像装置106a-106c已经被校准,所以我们知道任何两个成像装置之间的相对姿态,我们可以使用三角测量算法来找到3d空间中的最佳光学中心525。
77.因此,在框606中,使用每个成像装置104a-104c的lcd遮罩的中心位置544a-544c和传感器106sa-106sc的中心来确定成像设备101的最佳光学中心525。替代地,对于不使用lcd遮罩层的情况下的设置而言,可以直接从成像区538a-538c的中心位置541a-541c来确定最佳光学中心525。照明板区域和图像中心一起确定成像区538a-538c,并且从而确定成像区538a-538c的中心位置541a-541c。然后,可以应用三角测量算法来导出3d空间中的最佳光学中心525。
78.机械中心定位虽然最佳光学中心525是用于放置样本管102来进行背部照明的优选位置,但是由于机械限制,在该点处放置样本管102可能在物理上是不可行的。因此,机械中心定位的目标是找到样本管102可以被放置在其中的沿着轨道108的空间中的位置,该位置最接近最佳光学中心525。为此,该方法可以使用安装在载体122中的管校准工具450(图4c-4d)。管校准工具450可以包括管状构件,该管状构件可以在图4c所示的机械位置中被容纳在载体122中的插口422r中。载体122中的插口422r可以通过支撑件422s来形成。可以使用更多或更少的支撑件。因此,在框608中,将管校准工具450安装在驻留于轨道108上的载体122中。
79.管校准工具450被放置在载体122中,载体122通过任何合适的方法沿着轨道108移动,并且根据方法600的校准精确地校准中心点442的位置(管102的中心线上的物理3d中心,用于其表征)。管校准工具450可以驻留于载体122的插口422r中,该载体122类似于美国专利公布2018/0372648中示出的载体。可以使用其他合适的载体。管校准工具450可以包括如图4d中所示的阶梯(step)426。该阶梯426和较小尺寸部分427可以用于相对于如图5h-5j中所示的图像来定位管校准工具450的中心点442。针对每个视点1、2、3的中心点542a-542c是阶梯426的平面和较小尺寸部分427的横向中心线的交点。
80.通过经由中心寻找例程(center finding routine)在如图5h-5j中所示的每个图像504a'-504b'中检测来自每个视点1、2、3的工具中心542a-542c,可以定位工具中心点
542a-542c,并且可以利用三角测量算法来确定工具的3d中心点442。然后,方法600将当前机械中心位置与最佳光学中心525进行比较,并且调整载体122沿着轨道108的位置,直到管校准工具450的中心点542a-542c到达最接近最佳光学中心525的位置。这可能需要若干次迭代。管校准工具450在该最终位置处的中心点542a-542c将被视为机械中心535。
81.一旦我们已经标识了机械中心535,当我们将样本管102放置在机械中心535处时,我们就可以将该机械中心从每个成像装置104a-104c反向投影到其对应的背光板104a-104c,以找到样本管102正后方的光照中心,并且相应地定义具有固定大小区域的感兴趣区域(roi)747。
82.因此,在框610中,在轨道108上移动载体122,使得管校准工具450的中心(例如,较小尺寸部分427的中心)位于最接近成像设备101的最佳光学中心525的位置处,其中最佳光学中心525由图5h-5j中所示的以最佳光学中心525为中心的矩形框来表达。因此,管校准工具450的中心点442用于确定感兴趣区域(roi)747(例如,图7b)的中心位置,该感兴趣区域(roi)747用于针对每个成像装置106a-106c的每个视点1-3中的背光校准。因此,在框616中,确定用于背光校准的感兴趣区域(roi)747(例如,图7b)。roi 747可以被选择成具有如下大小:该大小与将在样本管102或试样212中表征的区相关联。例如,可以将roi 747选择成具有预期血清或血浆部分212sp的大小、或者略微更大。一旦选择了感兴趣区域roi 747,则可以在框716中校准roi 747。在框616中,可以针对所有视点1-3重复上述过程。下面描述了用于校准光板104a-104c中的、在方法600中标识的感兴趣区域(roi)的一个合适的校准方法700。
83.调整对于该装置(例如,品质检查模块100的成像设备101)的目标应用,合期望的是,板照明是均匀的/甚至处于预定照明强度下。板的照明强度主要取决于用于驱动可以被包括在led条带中的相应led的电气驱动电流。该驱动电流是已知的,但是存在也会影响强度的若干个未知因素,例如:
‑ꢀ
个体led效率(辐射通量对比(vs.)电流);
‑ꢀ
led对比光导的光耦合损耗,例如机械公差和表面品质;
‑ꢀ
光导材料成分中的公差。
84.由于这些未知因素,不可能仅再现电气驱动电流来实现可再现的照明强度;取而代之的是,如下文中参考图7在以下校准方法700中所描述的那样对其进行校准。
85.光源(例如,光源104a、104b、104c)的感兴趣区域(roi)747中的照明均匀性主要取决于相应光源104a-104c的相应侧(例如,第一横向侧746和第二横向侧748)上的多个光元件445(例如,其可以被布置为led条带,参见图4b和7b)上的照明功率分布。由于roi 747以及因此与多个光元件445(例如,光条带)的距离可能取决于上面讨论的机械中心位置校准而变化,因此本校准方法700操作以针对那些光板(例如,光源104a、104b、104c)以两个阶段来调整去往相应多个光元件445的驱动电流,同时利用相对的成像装置106a、106b、106c来观察相应光源104a、104b、104c。
86.根据方法700,在框702中,首先开启位于诸如更接近roi 747的第一侧(例如,第一横向侧746)上的多个光元件445(例如,其可以被布置成led条带)。
87.在框704中,然后调整去往第一侧746的光元件445(例如,led)的驱动电流cs1,直
到roi 747处的代表性强度ir(例如,第一平均强度)达到第一预设强度值ip1(例如,在0至256位数(digit)灰度级范围的范围内的该数字图像中的100位数)。接下来,方法700基本上在该预设强度值ip下保持线450r中的流向第一侧746的光元件445的驱动电流cs1,并且在框706中,调整线450l中的去往第二侧748上的光元件445(例如,led,其可以被布置成条带或阵列)的驱动电流cs2,直到roi 747的代表性强度(例如,平均强度)达到第二预设强度值(例如,在0至256灰度级范围的范围内的该数字图像中的180位数)。
88.在对更接近roi 747(参见边界框)的多个光元件(led条带)的首次校准中,示出了光元件(led)调整的示例的像素化图像(照片),直到平均强度达到第一预设强度水平(例如,在0至256灰度级范围的范围中的100位数),然后,如图7d中所示,调整远离roi 747的光元件(led条带)的驱动电流,直到代表性强度ir(例如,平均强度)达到第二预设强度值ip2,该第二预设强度值ip2是足以进行背部照明的预期值(例如,在0至256灰度级范围的范围中的180位数)。
89.对于其中roi中心位于距两侧几乎相等的距离处的板(例如,光源104a)而言,我们将相同的电流设置到光元件445(led)的两侧746、748,并且对其进行调整,直到roi 747的平均强度达到最终预设值(例如,在该图像中的0至256范围中的180位数)。为了加快电流调整过程,可以将两个或更多个预选的电流设置保存在存储器中,并且然后可以测量对应的强度。利用这些值,方法700可以利用一阶或二阶方程来近似电流强度曲线,以用于预测可以应用什么电流以便生成目标强度。因此,通常可以在几次迭代内达到roi 747的最终目标强度。该校准方法700可以针对每个感兴趣的波长来执行,该感兴趣的波长诸如例如针对每个光源104a-104c的r、g、b、w、uv、ir和/或nir。
90.健康检查当我们使用中心roi 747以用于校准光元件445(例如,led条带)时,可能期望验证整个光源或其代表性部分(例如,光源104a、104b、104c)上的光分布,以防止或最小化多个样本品质检查设备100内和跨多个样本品质检查设备100的不一致光照。基于中心roi 747相对于整个光板104a-104c的区的位置,可以选择多个偏离中心的区域,并且然后可以将偏离中心的区域(区)的代表性强度(例如,平均强度)与中心roi 747的平均强度进行比较。这些区域的面积可以具有任何大小,但是在一些实施例中可以是与中心roi 747相同的大小。
91.图8示出了这些区域(点线框和点划线框)、以及与对应于中心roi 747的位置的中心roi(实心框)相比该板的其他区域的平均强度的示例像素化图像,该平均强度由百分比来表示。通过利用参考样本品质检查系统或使用来自多个良好样本品质检查系统的统计信息来建立每个区域的标称强度值,然后可以验证任何光板的一致性。这可以用于进行led健康检查,可以周期性地或者以任何期望间隔来执行led健康检查。
92.现在将描述用于校准成像设备101的校准方法600。校准方法600包括理想地在品质检查模块100的成像设备101实际采取预筛选成像测量之前发生的成像。因此,在再次执行重新校准之前,校准方法600可以用于多于一个预筛选操作(例如,对多个样本管102的预筛选)。校准方法600可以在对任何样本管102的预筛选之前进行,该预筛选诸如针对干扰物(诸如针对hiln)、伪影(诸如,凝块、泡沫或气泡)等的存在。在一些实施例中,单个校准方法600可以针对样本管102的特定支架、针对大量样本管102、针对诸如轮班(shift)、一天、一周或一个月之类的时间段、或在一定数量的样本管102被预筛选之后的其他时间段、或任何
其他合适的校准时段或间隔来进行。因此,该校准方法可以在对多个样本管进行预筛选之后或者在发起预筛选后的特定时间段之后进行。
93.虽然本发明容许有各种修改和替代形式,但是其特定系统、设备和方法实施例已经在附图中以示例方式被示出,并且在本文中详细描述。然而,应当理解的是,并不意图将本公开限制于所公开的特定系统、设备或方法,而是相反地,本发明将覆盖落入权利要求的范围内的所有修改、等同物和替代物。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。